一种自动粘料机的制作方法
1.本实用新涉及一种将物料黏合的设备。
背景技术:
2.在生产片状磁体时通常将小块磁体进行切割成片。磁体加工过程中由于工艺条件限制,体积有限,不能做的很大或者很长,成本偏高。因此需要将小块的磁体黏合成大块的随后进行统一加工切片。现有生产工艺中需要人为将磁体粘胶进行黏合,不利于职业健康。还没有一种使用方便的自动粘料设备。
技术实现要素:
3.为了解决现有磁体加工过程中需要人工操作不利于职业健康且目前还没有一种使用方便的粘料设备的不足。本实用新型提供一种自动粘料机。
4.本实用新型有益效果在于:只需将物料逐层放置在储料箱内即可自动进行粘合使用方便;避免了员工对胶水接触提高了职业安全;采用双机械手配合传送带取放、运送、涂胶分步操作提高设备稼动率进而提高设备运行效率。
5.本实用新型采用的技术方案为:一种自动粘料机,包括装载台,所述装载台上设有机械手以及机械手控制系统,以及储料箱,所述机械手包括用于供料的第一机械手以及用于处理物料的第二机械手,所述第一机械手上设有吸盘,还包括传送带,所述第一机械手将储料箱上的片状物料逐个吸附至传送带上并由传送带逐个传送至第二机械手处,所述第二机械手驱动端设有拾取物料的机构以及涂胶机构,还包括用于存储物料的理料台。
6.进一步,所述理料台包括侧挡板以及与侧挡板相对设置的驱动挡板,所述驱动挡板利用驱动机构驱动对物料侧向进行整理。
7.进一步,还包括位于所述储料箱上方的摄像头,所述摄像头识别物料方向并将物料方向通过控制系统转换成第一机械手运动角度,第一机械手在拾取物料时将胡乱摆放的物料按特定方向排布在传送带上。
8.进一步,所述机械手包括基座以及设置在基座上的第一旋臂以及设置在第一悬臂上的第二悬臂,所述第二悬臂上设有旋转升降轴。
9.进一步,所述理料台底板可升降设置,随着物料进入升降台逐渐下降。通过升降底板减少第二机械手运动轨迹,提高物料摆放稳定性。
10.进一步,所述涂胶机构包括设置在第二机械手驱动端的喷头以及与喷头连接的软管,所述软管设置在胶桶内并通过泵将胶水泵送。进一步,还包括将装载台上端密封的外壳。通过密封能够减少灰尘进入,同时降低胶水挥发对员工造成的损害。
11.进一步,所述传送带末端设有挡板,所述第二机械手上吸盘数量为至少两个。
附图说明
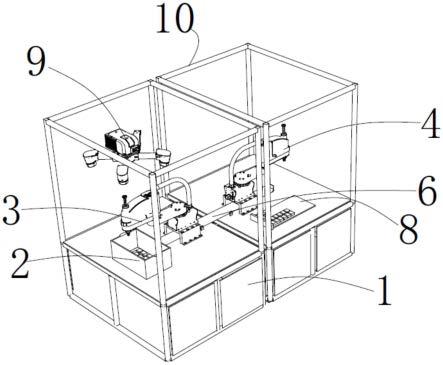
12.图1为本实用新型立体图。
13.图2为本实用新型理料台结构示意图。
14.图3为本实用新型第二机械手驱动部位结构示意图。
15.其中:1、装载台;2、储料箱;3、第一机械手;4、第二机械手;5、吸盘;6、传送带;8、理料台;81、侧挡板;82、第一驱动挡板;83、第二驱动挡板;9、摄像头;31、基座;32、第一旋臂;33、第二悬臂;34、旋转升降轴;83、底板;41、喷头;42、软管;43、胶桶;44、泵;10、外壳。
具体实施方式
16.下面结合具体附图对本实用新型作进一步说明。
17.实施例一:如图1至图3所示:一种自动粘料机,包括装载台1,所述装载台1上设有机械手以及机械手控制系统,以及储料箱2,所述机械手包括用于供料的第一机械手3以及用于处理物料的第二机械手4,所述第一机械手3上设有吸盘5,还包括传送带6,所述第一机械手3将储料箱2上的片状物料逐个吸附至传送带6上并由传送带6逐个传送至第二机械手4处,所述第二机械手4驱动端设有拾取物料的机构以及涂胶机构,还包括用于存储物料的理料台8。
18.本实施例中,还包括位于所述储料箱2上方的摄像头9,所述摄像头9识别物料方向并将物料方向通过控制系统转换成第一机械手3运动角度,第一机械手3在拾取物料时将胡乱摆放的物料按特定方向排布在传送带6上。
19.本实施例中,所述机械手包括基座31以及设置在基座31上的第一旋臂32以及设置在第一悬臂上的第二悬臂33,所述第二悬臂33上设有旋转升降轴34。
20.本实施例中,所述涂胶机构包括设置在第二机械手4驱动端的喷头41以及与喷头41连接的软管42,所述软管42设置在胶桶43内并通过泵44将胶水泵44送。进一步,还包括将装载台1上端密封的外壳10。通过密封能够减少灰尘进入,同时降低胶水挥发对员工造成的损害。
21.实施例二,本实施例是基于实施例一的改进,如图3所示:所述理料台8包括侧挡板81以及与侧挡板81相对设置的驱动挡板82,所述驱动挡板82利用驱动机构驱动对物料侧向进行整理。本实施例中,所述理料台8底板83可升降设置,随着物料进入升降台逐渐下降。通过升降底板83减少第二机械手4运动轨迹,提高物料摆放稳定性。
22.所述驱动挡板包括第一驱动挡板82以及第二驱动挡板83,所述第一驱动挡板82包括驱动机构以及挡板,所述第二驱动挡板包括驱动机构以及一侧弯折有直角的挡板;堆叠时第一驱动挡板与第二驱动挡板驱动将物料侧面对齐,堆叠后第二驱动机构83收回,第一驱动挡板82继续驱动将物料推离底板83。
23.实施例三:本实施例是实施例一的改进,如图3所示:所述传送带末端设有挡板61,所述第二机械手上吸盘数量为四个。吸盘排布物料经传送带传送至末端随后由挡板限位进行按序排列,通过第二机械手一次性吸取四个物料进行堆叠。由于第二机械手动作比第一机械手多了涂胶工序,因此第一机械手等待时间会较长,设置多个物料一次性放置可提高设备稼动率。
技术特征:
1.一种自动粘料机,包括装载台(1),所述装载台(1)上设有机械手以及机械手控制系统,以及储料箱(2),其特征在于:所述机械手包括用于供料的第一机械手(3)以及用于处理物料的第二机械手(4),所述第一机械手(3)上设有吸盘(5),还包括传送带(6),所述第一机械手(3)将储料箱(2)上的片状物料逐个吸附至传送带(6)上并由传送带(6)逐个传送至第二机械手(4)处,所述第二机械手(4)驱动端设有拾取物料的机构以及涂胶机构,还包括用于存储物料的理料台(8)。2.根据权利要求1所述的自动粘料机,其特征在于:所述理料台(8)包括侧挡板(81)以及与侧挡板(81)相对设置的驱动挡板,所述驱动挡板利用驱动机构驱动对物料侧向进行整理。3.根据权利要求1所述的自动粘料机,其特征在于:还包括位于所述储料箱(2)上方的摄像头(9),所述摄像头(9)识别物料方向并将物料方向通过控制系统转换成第一机械手(3)运动角度,第一机械手(3)在拾取物料时将胡乱摆放的物料按特定方向排布在传送带(6)上。4.根据权利要求1所述的自动粘料机,其特征在于:所述机械手包括基座(31)以及设置在基座(31)上的第一旋臂(32)以及设置在第一悬臂上的第二悬臂(33),所述第二悬臂(33)上设有旋转升降轴(34)。5.根据权利要求2所述的自动粘料机,其特征在于:所述理料台(8)底板(83)可升降设置,随着物料进入升降台逐渐下降。6.根据权利要求1所述的自动粘料机,其特征在于:所述涂胶机构包括设置在第二机械手(4)驱动端的喷头(41)以及与喷头(41)连接的软管(42),所述软管(42)设置在胶桶(43)内并通过泵(44)将胶水泵(44)送。7.根据权利要求1所述的自动粘料机,其特征在于:还包括将装载台(1)上端密封的外壳(10)。8.根据权利要求2所述的自动粘料机,其特征在于:所述驱动挡板包括第一驱动挡板以及第二驱动挡板,所述第一驱动挡板包括驱动机构以及挡板,所述第二驱动挡板包括驱动机构以及一侧弯折有直角的挡板。9.根据权利要求1所述的自动粘料机,其特征在于:所述传送带末端设有挡板,所述第二机械手上吸盘数量为至少两个。
技术总结
一种自动粘料机,包括装载台,所述装载台上设有机械手以及机械手控制系统,以及储料箱,所述机械手包括用于供料的第一机械手以及用于处理物料的第二机械手,所述第一机械手上设有吸盘,还包括传送带,所述第一机械手将储料箱上的片状物料逐个吸附至传送带上并由传送带逐个传送至第二机械手处,所述第二机械手驱动端设有拾取物料的机构以及涂胶机构,还包括用于存储物料的理料台。本实用新型只需将物料逐层放置在储料箱内即可自动进行粘合使用方便;避免了员工对胶水接触提高了职业安全;采用双机械手配合传送带取放、运送、涂胶分步操作提高设备稼动率进而提高设备运行效率。操作提高设备稼动率进而提高设备运行效率。操作提高设备稼动率进而提高设备运行效率。
技术研发人员:徐海银
受保护的技术使用者:宁波韵凯磁业有限公司
技术研发日:2022.11.03
技术公布日:2023/1/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1