一种物料搬运机械臂
本技术涉及搬运设备,具体是一种物料搬运机械臂。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
2、传统的搬运机械臂主要由机械臂本体、导轨、安装在导轨上的移动座以及安装在移动座上的驱动轮组成,将机械臂本体的支撑端通过螺栓固定在移动座上,通过移动座在导轨上的移动,带动机械臂本体在两个工位之间移动,但在搬运机械臂长时间使用的过程中,移动座与导轨会出现磨损,使得移动座上的驱动轮与导轨之间发生相对滑动,出现驱动轮打滑的问题,导致机械臂移动位置出现偏差,移动精度降低。
技术实现思路
1、本实用新型的目的在于解决现有技术中存在的问题,提供一种物料搬运机械臂,主要目的是保证机械臂的移动精度,次要目的是提供一种夹持稳定的夹持机构,通过齿条与齿槽的配合,能够防止电机驱动轮打滑,增加了电机驱动轮在导轨表面移动的稳定性,能够保证移动精度。
2、本实用新型为实现上述目的,通过以下技术方案实现:
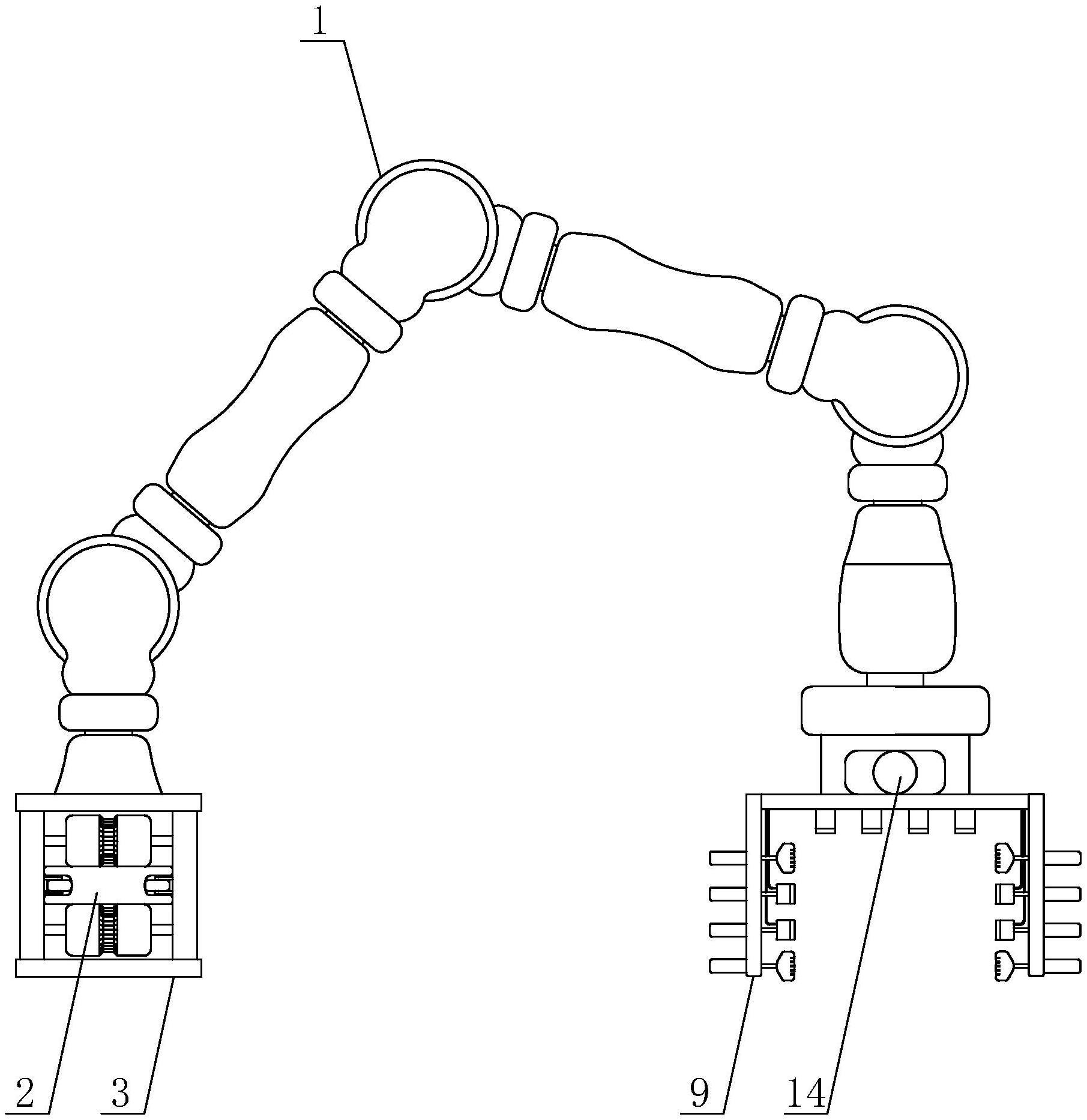
3、一种物料搬运机械臂,包括机械臂本体、导轨以及安装在导轨上的移动座,所述机械臂本体的支撑端固定安装在移动座上,所述导轨从移动座的中部穿过,所述导轨的上下两侧均设有电机驱动轮,所述电机驱动轮与导轨抵接,所述电机驱动轮安装在移动座上,所述导轨的上下两端面上均设有齿条,所述齿条沿导轨的长度方向布置,所述电机驱动轮的外壁上设有与齿条啮合的齿槽。
4、优选的,所述导轨的左右两端面上均设有导向槽,所述移动座上设有与导向槽相适应的导向轮。
5、优选的,所述机械臂本体的夹持端设有u型夹持架,所述u型夹持架内的顶部设有第一吸盘,所述u型夹持架的左右两端均设有若干个气缸,所述气缸的缸杆伸入u型夹持架的内侧,所述缸杆的端部设有物料固定装置。
6、优选的,所述物料固定装置有两种,其中一种物料固定装置为固定在缸杆的端部的胶垫,另外一种物料固定装置为固定在缸杆的端部的第二吸盘。
7、优选的,所述机械臂本体的夹持端设有用于为第一吸盘、第二吸盘提供负压的气泵。
8、优选的,所述u型夹持架的左右两端均布置有两个胶垫、两个第二吸盘。
9、对比现有技术,本实用新型的有益效果在于:
10、1、本实用新型通过齿条与齿槽的配合,提高电机驱动轮与导轨之间的摩擦力,能够防止电机驱动轮转动时打滑,增加了电机驱动轮在导轨表面移动的稳定性,能够保证移动精度。
11、2、本实用新型通过导向槽与导向轮,能够减少导轨与移动座的内壁之间的磨损,避免移动座在导轨上左右晃动,增加了移动座移动的稳定性。
12、3、本实用新型通过第一吸盘对物料提供吸引力,再利用气缸为物料提高夹持力,能够保证物料夹持的稳定性。
13、4、本实用新型的物料固定装置有两种,一种是被动的胶垫,通过气缸提供的推力,将物料夹持在两个胶垫之间;另外一种是主动的第二吸盘,气缸将第二吸盘推向物料,利用第二吸盘的吸力,将物料固定在u型夹持架内,能够大大提高物料夹持的稳定性。
技术特征:
1.一种物料搬运机械臂,包括机械臂本体(1)、导轨(2)以及安装在导轨(2)上的移动座(3),所述机械臂本体(1)的支撑端固定安装在移动座(3)上,其特征在于:所述导轨(2)从移动座(3)的中部穿过,所述导轨(2)的上下两侧均设有电机驱动轮(4),所述电机驱动轮(4)与导轨(2)抵接,所述电机驱动轮(4)安装在移动座(3)上,所述导轨(2)的上下两端面上均设有齿条(5),所述齿条(5)沿导轨(2)的长度方向布置,所述电机驱动轮(4)的外壁上设有与齿条(5)啮合的齿槽(6)。
2.根据权利要求1所述的一种物料搬运机械臂,其特征在于:所述导轨(2)的左右两端面上均设有导向槽(7),所述移动座(3)上设有与导向槽(7)相适应的导向轮(8)。
3.根据权利要求1所述的一种物料搬运机械臂,其特征在于:所述机械臂本体(1)的夹持端设有u型夹持架(9),所述u型夹持架(9)内的顶部设有第一吸盘(10),所述u型夹持架(9)的左右两端均设有若干个气缸(11),所述气缸(11)的缸杆伸入u型夹持架(9)的内侧,所述缸杆的端部设有物料固定装置。
4.根据权利要求3所述的一种物料搬运机械臂,其特征在于:所述物料固定装置有两种,其中一种物料固定装置为固定在缸杆的端部的胶垫(12),另外一种物料固定装置为固定在缸杆的端部的第二吸盘(13)。
5.根据权利要求4所述的一种物料搬运机械臂,其特征在于:所述机械臂本体(1)的夹持端设有用于为第一吸盘(10)、第二吸盘(13)提供负压的气泵(14)。
6.根据权利要求4所述的一种物料搬运机械臂,其特征在于:所述u型夹持架(9)的左右两端均布置有两个胶垫(12)、两个第二吸盘(13)。
技术总结
本技术公开了一种物料搬运机械臂,主要涉及搬运设备技术领域;包括机械臂本体、导轨以及安装在导轨上的移动座,所述机械臂本体的支撑端固定安装在移动座上,所述导轨从移动座的中部穿过,所述导轨的上下两侧均设有电机驱动轮,所述电机驱动轮与导轨抵接,电机驱动轮安装在移动座上,所述导轨的上下两端面上均设有齿条,所述齿条沿导轨的长度方向布置,所述电机驱动轮的外壁上设有与齿条啮合的齿槽;本技术通过齿条与齿槽的配合,能够防止电机驱动轮打滑,增加了电机驱动轮在导轨表面移动的稳定性,能够保证移动精度。
技术研发人员:张康立,张子恒,邹凯,曹永达,郭敏
受保护的技术使用者:山东华宇工学院
技术研发日:20221108
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!