一种无人自动化钢卷悬吊搬运起重机的制作方法
本技术涉及悬吊搬运设备,具体为一种无人自动化钢卷悬吊搬运起重机。
背景技术:
1、在车间使用运用钢卷时,需要使用到起重机,而起重机是在一定范围内垂直提升和水平搬运重物的多动作起重机械,起重机主要包括起升机构、运行机构、变幅机构、回转机构和金属结构等,现有钢卷在起吊时通常需要叉车辅助搬运,使用较为麻烦。
2、基于上述问题,申请公布号为cn 113184714 a的发明专利公开了一种无人自动化钢卷悬吊搬运起重机,该方案中可在便于吊搬的基础上保证钢卷的稳定性,也减少了存在的危险性,但是,本装置在实际使用过程中,其结构较为复杂,无法较为简洁的对钢卷进行十分安全的悬吊搬运工作,使用存在局限性。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的无法较为简洁的对钢卷进行十分安全的悬吊搬运工作的问题,而提出的一种无人自动化钢卷悬吊搬运起重机。
2、为实现上述目的,本实用新型提供如下技术方案:
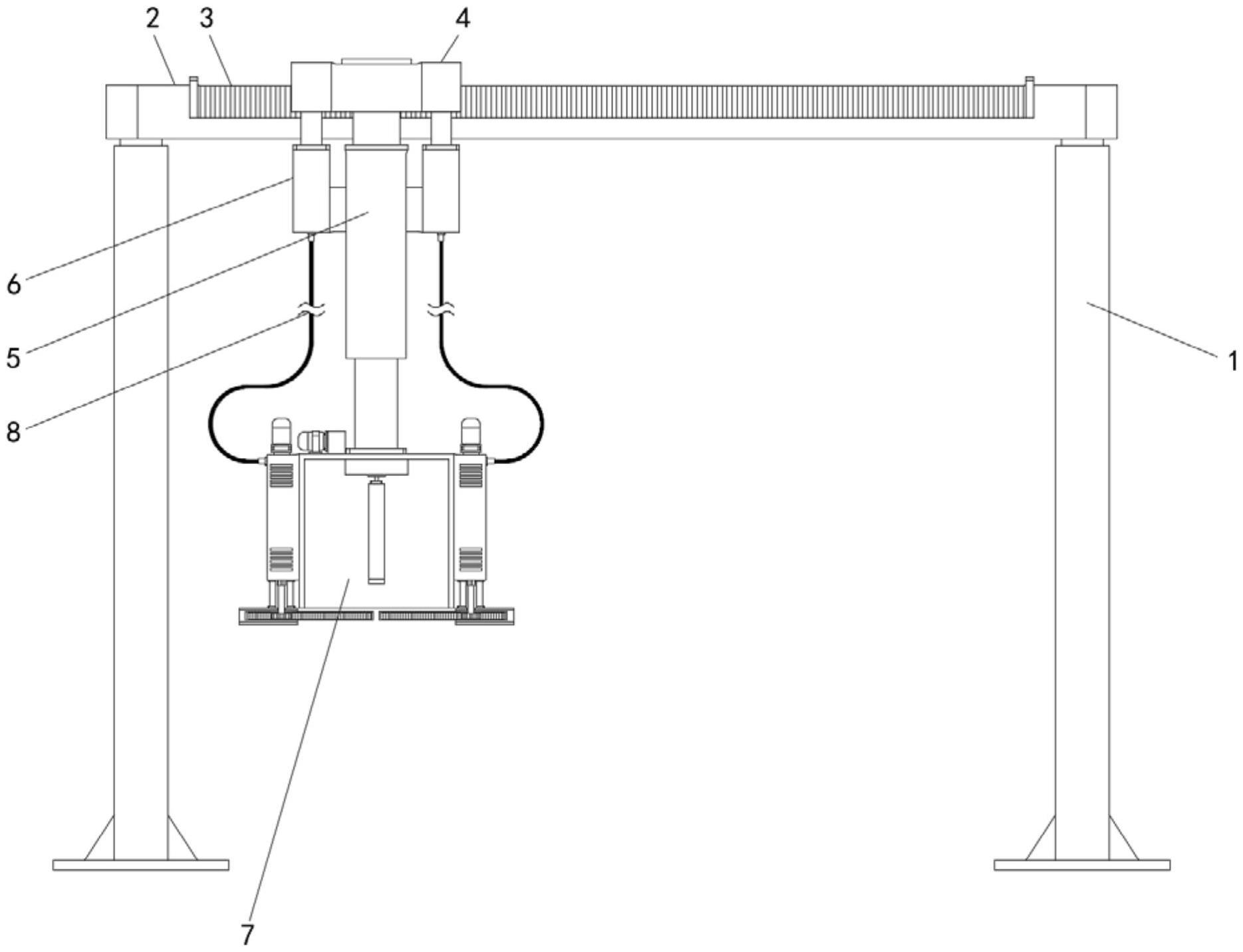
3、一种无人自动化钢卷悬吊搬运起重机,包括竖架和横梁组成的龙门架,所述横梁上设置有横向导轨,所述横向导轨外传动安装有驱动台,所述驱动台的下表面设置有安全悬吊机构,其包括:
4、防护框架,其外侧设置有悬吊电机;
5、固定钩架,其设置于防护框架的内侧;
6、齿轮杆,其设置于防护框架下表面的两侧;
7、调节齿板,其设置于齿轮杆外,且齿轮杆与调节齿板的内侧啮合
8、防脱台,其套接于调节齿板外侧。
9、进一步,所述防护框架的上侧设置有与驱动台下表面连接的液压杆,而液压杆的输出轴与防护框架固定。
10、进一步,所述防护框架的内顶壁上设置有减速箱,所述固定钩架与减速箱的输出端通过拉绳传动连接,所述悬吊电机的输出端与减速箱的输入端对接。
11、进一步,所述防护框架的相对两侧外壁上均安装有调节台,所述调节台上设置有输出轴与齿轮杆一体固定的控制电机。
12、进一步,所述防脱台的数量与调节台相等,且其固定于调节台远离控制电机的一侧。
13、进一步,所述调节台的外侧设置有接头,所述驱动台的下表面安装有控制箱,所述接头与控制箱通过导线电性连接。
14、与现有技术相比,本申请的有益效果是:
15、该无人自动化钢卷悬吊搬运起重机,能够在确保钢卷悬吊搬运十分安全的情况下能够兼顾较为简洁的结构组成,同时,其整体操作十分便捷,因此便于实际使用,从而有效的解决了无法较为简洁的对钢卷进行十分安全的悬吊搬运工作的问题。
技术特征:
1.一种无人自动化钢卷悬吊搬运起重机,包括竖架(1)和横梁(2)组成的龙门架,其特征在于:所述横梁(2)上设置有横向导轨(3),所述横向导轨(3)外传动安装有驱动台(4),所述驱动台(4)的下表面设置有安全悬吊机构(7),其包括:
2.根据权利要求1所述的一种无人自动化钢卷悬吊搬运起重机,其特征在于:所述防护框架(701)的上侧设置有与驱动台(4)下表面连接的液压杆(5),而液压杆(5)的输出轴与防护框架(701)固定。
3.根据权利要求1所述的一种无人自动化钢卷悬吊搬运起重机,其特征在于:所述防护框架(701)的内顶壁上设置有减速箱(703),所述固定钩架(704)与减速箱(703)的输出端通过拉绳传动连接,所述悬吊电机(702)的输出端与减速箱(703)的输入端对接。
4.根据权利要求1所述的一种无人自动化钢卷悬吊搬运起重机,其特征在于:所述防护框架(701)的相对两侧外壁上均安装有调节台,所述调节台上设置有输出轴与齿轮杆(709)一体固定的控制电机(705)。
5.根据权利要求4所述的一种无人自动化钢卷悬吊搬运起重机,其特征在于:所述防脱台(707)的数量与调节台相等,且其固定于调节台远离控制电机(705)的一侧。
6.根据权利要求5所述的一种无人自动化钢卷悬吊搬运起重机,其特征在于:所述调节台的外侧设置有接头(706),所述驱动台(4)的下表面安装有控制箱(6),所述接头(706)与控制箱(6)通过导线(8)电性连接。
技术总结
本技术涉及一种无人自动化钢卷悬吊搬运起重机,包括竖架和横梁组成的龙门架,所述横梁上设置有横向导轨,所述横向导轨外传动安装有驱动台,所述驱动台的下表面设置有安全悬吊机构,其包括:防护框架,其外侧设置有悬吊电机;固定钩架,其设置于防护框架的内侧;齿轮杆,其设置于防护框架下表面的两侧;调节齿板,其设置于齿轮杆外,且齿轮杆与调节齿板的内侧啮合防脱台,其套接于调节齿板外侧。该无人自动化钢卷悬吊搬运起重机,能够在确保钢卷悬吊搬运十分安全的情况下能够兼顾较为简洁的结构组成,同时,其整体操作十分便捷,因此便于实际使用,从而有效的解决了无法较为简洁的对钢卷进行十分安全的悬吊搬运工作的问题。
技术研发人员:朱敏舟
受保护的技术使用者:江苏中能赛创智能装备科技有限公司
技术研发日:20221110
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!