一种无人自动拆跺装车装置的制作方法
本技术涉及仓储设备,具体为一种无人自动拆跺装车装置。
背景技术:
1、目前使用最广的一类拆跺装置是吸盘式或抓手式机器人拆垛机,利用吸盘或抓手在编程控制系统的作用下逐一提取料包实现拆跺,其应用对象主要是规整的箱式包装或轻质袋装,拆跺效率不高,设备结构复杂、成本较高,另一类拆垛机是利用分层料跺的不稳定性,使用附加的机械力强力推拉料包,使料包分散而实现拆跺,但对料包包装和内部物料均有所损伤。
2、授权公开号“cn208747165u”记载了“一种自动拆跺装置,包括斜撑支架、推拉气缸、主框架、提升装置、推包小车和控制系统;斜撑支架与主框架通过底端的活动支点和中部的推拉气缸连成一体,运行时由推拉气缸实现主框架的倾斜与回正;提升装置包括提升托架、提升气缸、链条轮、链条、导轨和行走小轮组成,提升气缸的活塞杆推动链条轮上下运动,链条的传动实现提升托架的上下运动;主框架倾斜时,推包小车可前后运动,推动料包进入滑道,实现拆跺分包功能。本新型的自动拆跺装置可以更完好、更高效的拆解更多类型的料跺,并辅助输送装置,实现全过程的无人化、高效化装车,极大地节约企业仓储物流管理成本”。
3、上述专利可以更完好、更高效的拆解更多类型的料跺,并辅助输送装置,实现全过程的无人化、高效化装车,极大地节约企业仓储物流管理成本,但是,其倾斜,需要整体进行倾斜,这一样需要的动力较大,并且,会存在平稳的现象,同时,其拆跺是利用重力惯性进行,但是,倾斜较大,容易整体滑落,倾斜较小,不易滑落,保证整体的使用。
技术实现思路
1、本实用新型提供了一种无人自动拆跺装车装置,通过倾斜机构的使用,可以使堆放的码垛自身进行倾斜,调整角度,不是整体进行倾斜,使装置的整体更加平稳,保证使用过程中的安全性,通过助推机构的使用,可以使码垛在滑落的过程中进行助推,保证码垛滑落拆除的效率,实现料跺逐层拆解,并且,可以根据倾斜机构的角度进行相应的调整,提高使用的效率。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种无人自动拆跺装车装置,包括:
3、存放架;
4、升降机构,设于存放架内,用以码垛的升降;
5、倾斜机构,设于存放架内,且倾斜机构连接于升降机构,用以码垛的角度倾斜,其中:所述倾斜机构包括承重板、倾斜板和倾斜气缸,所述承重板滑动连接于存放架内,且承重板连接于升降机构,所述倾斜板的一端转动连接于承重板的一端,所述倾斜气缸的一端通过连铰转动连接于承重板的下内壁靠近中心处,且倾斜气缸的另一端通过连铰转动连接于倾斜板的下表面一侧靠近边缘中心处;以及
6、助推机构,设于存放架上,用以码垛滑落时的助推,其中:所述助推机构包括调角部件、助推气缸和推板,所述助推气缸设有两个,两个所述助推气缸的一端均通过连铰分别转动连接于存放架的上表面两侧边缘处,所述推板的两端分别固定连接于两个助推气缸的输出端。
7、进一步的,所述升降机构包括:
8、驱动部件,设于存放架内,用以为升降提供动力;
9、传动部件,设于存放架内,且传动部件连接于驱动部件,用以驱动部件动力的传输;以及
10、升降部件,设于存放架内,所述升降部件连接于传动部件,且升降部件连接于承重板,用以控制承重板的升降。
11、进一步的,所述驱动部件包括正反转电机和蜗杆,所述正反转电机通过螺栓固定连接于存放架的底部,所述蜗杆固定连接于正反转电机的输出端。
12、进一步的,所述传动部件包括驱动锥齿杆和蜗轮,所述驱动锥齿杆转动连接于存放架的底部靠近中心处,所述蜗轮固定连接于驱动锥齿杆的外表面中心处,且蜗轮与蜗杆相互啮合。
13、进一步的,所述升降部件包括螺纹杆和从动锥齿轮,所述存放架的外表面两侧均开设有限位槽,所述螺纹杆设有两个,每个所述螺纹杆均转动连接于每个限位槽内,所述从动锥齿轮设有两个,每个所述从动锥齿轮均固定连接于每个螺纹杆底部,且从动锥齿轮均螺纹连接于驱动锥齿杆上。
14、进一步的,所述调角部件包括调角气缸和调角铰,所述调角气缸设有两个,两个所述调角气缸分别安装设置于存放架的上表面两侧靠近边缘处,所述调角铰设有两个,每个所述调角铰均固定连接于每个调角气缸的输出端,且每个调角铰均安装设置于每个助推气缸上。
15、本实用新型提供了一种无人自动拆跺装车装置。具备以下有益效果:
16、(1)、该无人自动拆跺装车装置,通过倾斜机构的使用,可以使堆放的码垛自身进行倾斜,调整角度,不是整体进行倾斜,使装置的整体更加平稳,保证使用过程中的安全性。
17、(2)、该无人自动拆跺装车装置,通过助推机构的使用,可以使码垛在滑落的过程中进行助推,保证码垛滑落拆除的效率,实现料跺逐层拆解,并且,可以根据倾斜机构的角度进行相应的调整,提高使用的效率。
技术特征:
1.一种无人自动拆跺装车装置,其特征在于,包括:
2.根据权利要求1所述的一种无人自动拆跺装车装置,其特征在于,所述升降机构包括:
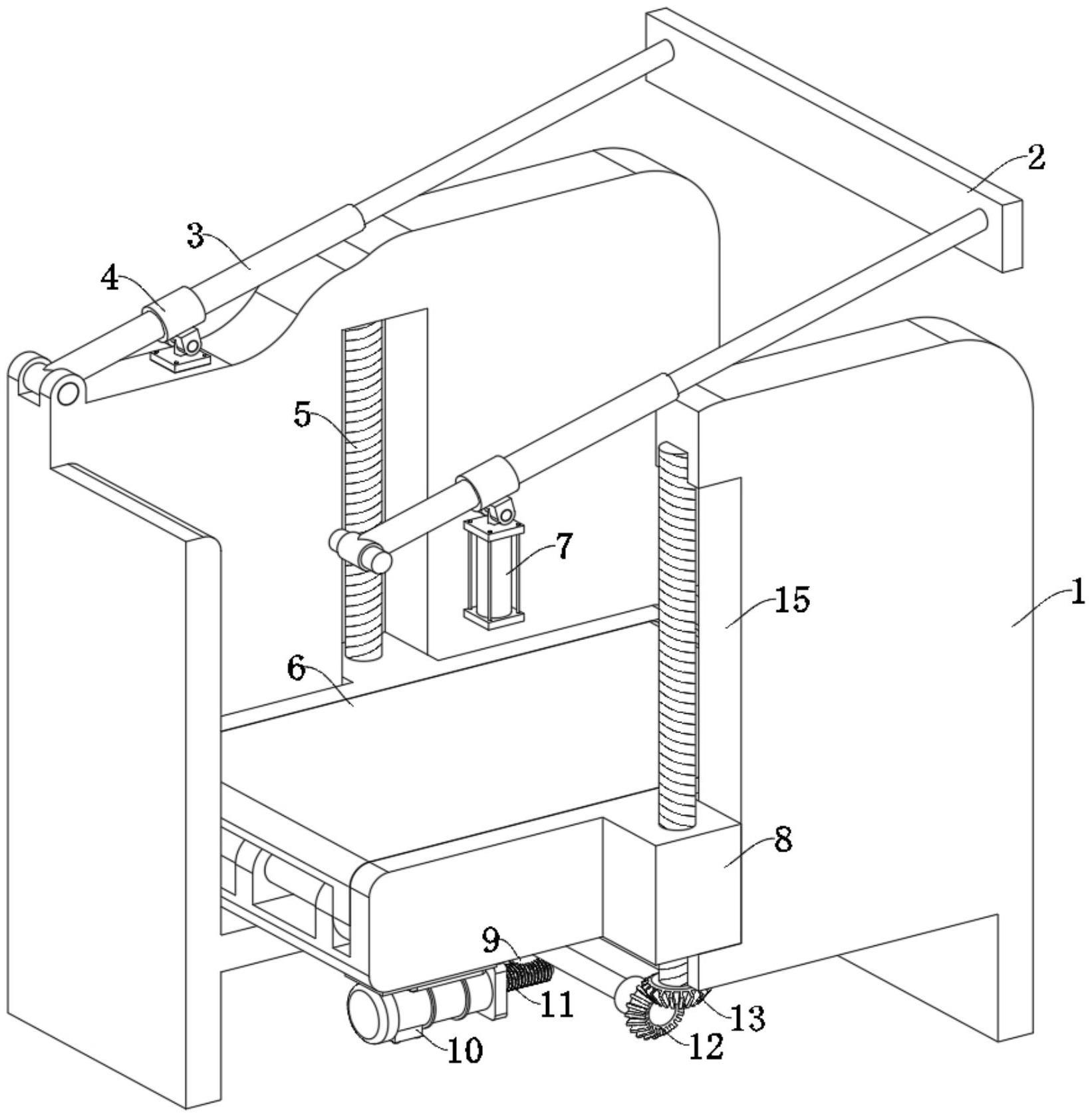
3.根据权利要求2所述的一种无人自动拆跺装车装置,其特征在于,所述驱动部件包括正反转电机(10)和蜗杆(11),所述正反转电机(10)通过螺栓固定连接于存放架(1)的底部,所述蜗杆(11)固定连接于正反转电机(10)的输出端。
4.根据权利要求3所述的一种无人自动拆跺装车装置,其特征在于,所述传动部件包括驱动锥齿杆(12)和蜗轮(9),所述驱动锥齿杆(12)转动连接于存放架(1)的底部靠近中心处,所述蜗轮(9)固定连接于驱动锥齿杆(12)的外表面中心处,且蜗轮(9)与蜗杆(11)相互啮合。
5.根据权利要求4所述的一种无人自动拆跺装车装置,其特征在于,所述升降部件包括螺纹杆(5)和从动锥齿轮(13),所述存放架(1)的外表面两侧均开设有限位槽(15),所述螺纹杆(5)设有两个,每个所述螺纹杆(5)均转动连接于每个限位槽(15)内,所述从动锥齿轮(13)设有两个,每个所述从动锥齿轮(13)均固定连接于每个螺纹杆(5)底部,且从动锥齿轮(13)均螺纹连接于驱动锥齿杆(12)上。
6.根据权利要求5所述的一种无人自动拆跺装车装置,其特征在于,所述调角部件包括调角气缸(7)和调角铰(4),所述调角气缸(7)设有两个,两个所述调角气缸(7)分别安装设置于存放架(1)的上表面两侧靠近边缘处,所述调角铰(4)设有两个,每个所述调角铰(4)均固定连接于每个调角气缸(7)的输出端,且每个调角铰(4)均安装设置于每个助推气缸(3)上。
技术总结
本技术公开了一种无人自动拆跺装车装置,涉及仓储设备技术领域,包括:存放架,升降机构,设于存放架内,用以码垛的升降,倾斜机构,设于存放架内,且倾斜机构连接于升降机构,用以码垛的角度倾斜,其中:倾斜机构包括承重板、倾斜板和倾斜气缸。该无人自动拆跺装车装置,通过倾斜机构的使用,可以使堆放的码垛自身进行倾斜,调整角度,不是整体进行倾斜,使装置的整体更加平稳,保证使用过程中的安全性,该无人自动拆跺装车装置,通过助推机构的使用,可以使码垛在滑落的过程中进行助推,保证码垛滑落拆除的效率,实现料跺逐层拆解,并且,可以根据倾斜机构的角度进行相应的调整,提高使用的效率。
技术研发人员:于华亮,尹峰,张海燕,宋增廷
受保护的技术使用者:东阿和康源饲料有限公司
技术研发日:20221115
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!