一种起重用抓斗的制作方法
本技术涉及起重机,具体为一种起重用抓斗。
背景技术:
1、抓斗起重机,俗名抓斗吊车,抓斗起重机是指装有抓斗的起重机械,广泛用于港口、码头、车站货场、矿山等方面装载各种散货、圆木、矿物、煤炭、砂石料、土石方等。抓斗起重机是一种自动取物机械,它的抓取和卸出物料动作是由卸船机司机操纵,不需要辅助人员,因而避免了工人的繁重劳动,节省了辅助工作时间,大大提高了装卸效率。而抓斗起重机的核心部件及为抓斗,抓料、取料、卸料均由抓斗负责。
2、但是现有的用于起重机的抓斗在使用时仍存在一定的缺陷,现有的抓斗通过抓斗的设计,一般只是使用“抓”的功能,从而使抓取时存在局限性,同时抓取的稳定性也不高。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种起重用抓斗。
2、为实现上述目的,本实用新型提供如下技术方案:一种起重用抓斗,包括爪体,所述爪体有两个,两个爪体之间活动安装有杆三且两个爪体在杆三上自由转动,所述两个爪体之间设置有联动机构,且两个爪体通过联动机构在杆三上同步运动,两个爪体的外侧均活动安装有铰链,所述铰链上均固定安装有杆一且两个杆一通过铰链活动安装在爪体上,两个杆一同样通过铰链连接到环一上,所述环一套接有杆二,所述杆二贯穿杆三并与杆三活动连接。
3、优选的,所述爪体是由横板和斜板组成,横板与斜板之间的夹角为60度,两个爪体以杆三的轴心转动,两个爪体对接后形成平行四边形。
4、优选的,所述联动机构包括有两个环二和槽二,每个联动机构中的两个环二分别固定连接到两个爪体上,所述杆三上开设有槽二,所述环二活动套接在槽二上,两个环二之间且在槽二上活动安装有齿轮轴,所述环二与齿轮轴的相接触的一面设计有齿牙,且环二的侧面与齿轮轴相啮合。
5、优选的,所述杆三的中心位置开设有槽一,所述杆二从槽一贯穿,所述杆二的顶端与伸缩电机相连接,所述杆二的下端且在杆三的下方固定安装有块一。
6、优选的,所述块一包括普通板材和磁铁块,所述联动机构中的齿轮轴设计有三个。
7、与现有技术相比,本实用新型提供了一种起重用抓斗,具备以下有益效果:
8、1、该起重用抓斗,开启外部伸缩电机,通过伸缩电机带动环一和杆二的上下移动,当环一上下移动时,可以改变两个爪体的相对位置,达到松开两个爪体或者闭合两个爪体的效果,通过两个爪体的形状设计,当两个爪体相互靠近后,两个爪体和杆三组成一个平行四边形,达到对爪体抓起的东西闭合提起的效果,同时两个爪体相互靠近时还可以达到夹紧物件的效果,使装置的适用范围更广。
9、2、该起重用抓斗,在杆二伸缩时,可以通过块一与两个爪体之间的相互挤压,保证被夹持的物件在抓起后的稳定性,同时块一设计为磁铁时还可以对金属物件进行吸附,达到更好的抓起效果。
技术特征:
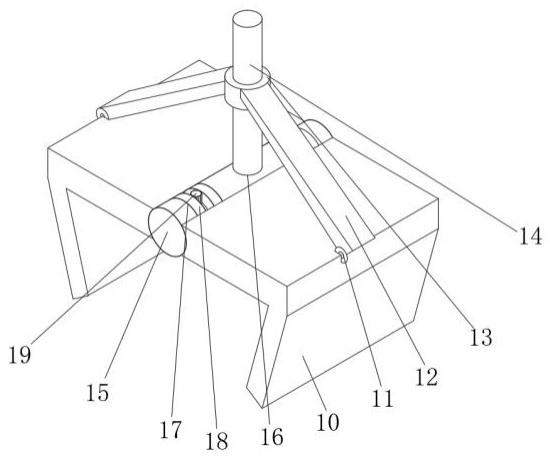
1.一种起重用抓斗,包括爪体(10),其特征在于:所述爪体(10)有两个,两个爪体(10)之间活动安装有杆三(15)且两个爪体(10)在杆三(15)上自由转动,所述两个爪体(10)之间设置有联动机构,且两个爪体(10)通过联动机构在杆三(15)上同步运动,两个爪体(10)的外侧均活动安装有铰链(11),所述铰链(11)上均固定安装有杆一(12)且两个杆一(12)通过铰链(11)活动安装在爪体(10)上,两个杆一(12)同样通过铰链连接到环一(13)上,所述环一(13)套接有杆二(14),所述杆二(14)贯穿杆三(15)并与杆三(15)活动连接。
2.根据权利要求1所述的一种起重用抓斗,其特征在于:所述爪体(10)是由横板和斜板组成,横板与斜板之间的夹角为60度,两个爪体(10)以杆三(15)的轴心转动,两个爪体(10)对接后形成平行四边形。
3.根据权利要求1所述的一种起重用抓斗,其特征在于:所述联动机构包括有两个环二(18)和槽二(17),每个联动机构中的两个环二(18)分别固定连接到两个爪体(10)上,所述杆三(15)上开设有槽二(17),所述环二(18)活动套接在槽二(17)上,两个环二(18)之间且在槽二(17)上活动安装有齿轮轴(19),所述环二(18)与齿轮轴(19)的相接触的一面设计有齿牙,且环二(18)的侧面与齿轮轴(19)相啮合。
4.根据权利要求3所述的一种起重用抓斗,其特征在于:所述杆三(15)的中心位置开设有槽一(16),所述杆二(14)从槽一(16)贯穿,所述杆二(14)的顶端与伸缩电机相连接,所述杆二(14)的下端且在杆三(15)的下方固定安装有块一(20)。
5.根据权利要求4所述的一种起重用抓斗,其特征在于:所述块一(20)包括普通板材和磁铁块,所述联动机构中的齿轮轴(19)设计有三个。
技术总结
本技术涉及起重机技术领域,且公开了一种起重用抓斗,包括爪体,爪体有两个,两个爪体之间活动安装有杆三,两个爪体之间设置有联动机构,且两个爪体通过联动机构在杆三上同步运动,两个爪体的外侧均活动安装有铰链,铰链上均固定安装有杆一,两个杆一同样通过铰链连接到环一上,环一套接有杆二,杆二贯穿杆三并与杆三活动连接,当环一上下移动时,可以改变两个爪体的相对位置,达到松开两个爪体或者闭合两个爪体的效果,通过两个爪体的形状设计,当两个爪体相互靠近后,两个爪体和杆三组成一个平行四边形,达到对爪体抓起的东西闭合提起的效果,同时两个爪体相互靠近时还可以达到夹紧物件的效果,使装置的适用范围更广。
技术研发人员:徐素兵
受保护的技术使用者:苏州硕力重工有限公司
技术研发日:20221125
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!