搬运机器人和仓储系统的制作方法
本公开涉及仓储物流,特别涉及一种搬运机器人,本公开还涉及一种包括该搬运机器人的仓储系统。
背景技术:
1、目前,仓储物流系统一般由呈密集排布的货架以及搬运机器人组成,货架用于对货物进行储存,另外,在货架之间留有允许搬运机器人进行运动和执行存取动作的巷道。搬运机器人根据出库指令或者入库指令,运动至对应货物的储存位置对其进行取放动作。
2、在现有技术中,传统的搬运机器人设置有与取箱机构配合使用的图像采集装置,在取箱机构对货物进行取放之前,图像采集装置可以先对货物的尺寸、位置、类型等信息进行采集,并且由控制单元将采集到的信息进行分析,之后基于分析结果对机器人进行控制,以方便取箱机构更精确地将货物放置到对应的货架上,或者是将货物从对应的货架上取出来。行走在巷道中的搬运机器人一般需要对两侧的货架进行存取工作,图像采集装置一般需要取放机构的配合才可以采集到指定位置的图像,这就使得图像采集装置需要依靠取放机构的转向才可以采集到不同方向上货架的容器信息。除此之外,只能设置两个或者多个图像采集装置,才可以满足其对不同方向容器采集的工作需要,这无疑增加了搬运机器人的制造成本及维护成本。
技术实现思路
1、本公开为了解决现有技术中存在的问题,提供了一种搬运机器人和仓储系统。
2、根据本公开的第一方面,提供了一种搬运机器人,该搬运机器人包括:
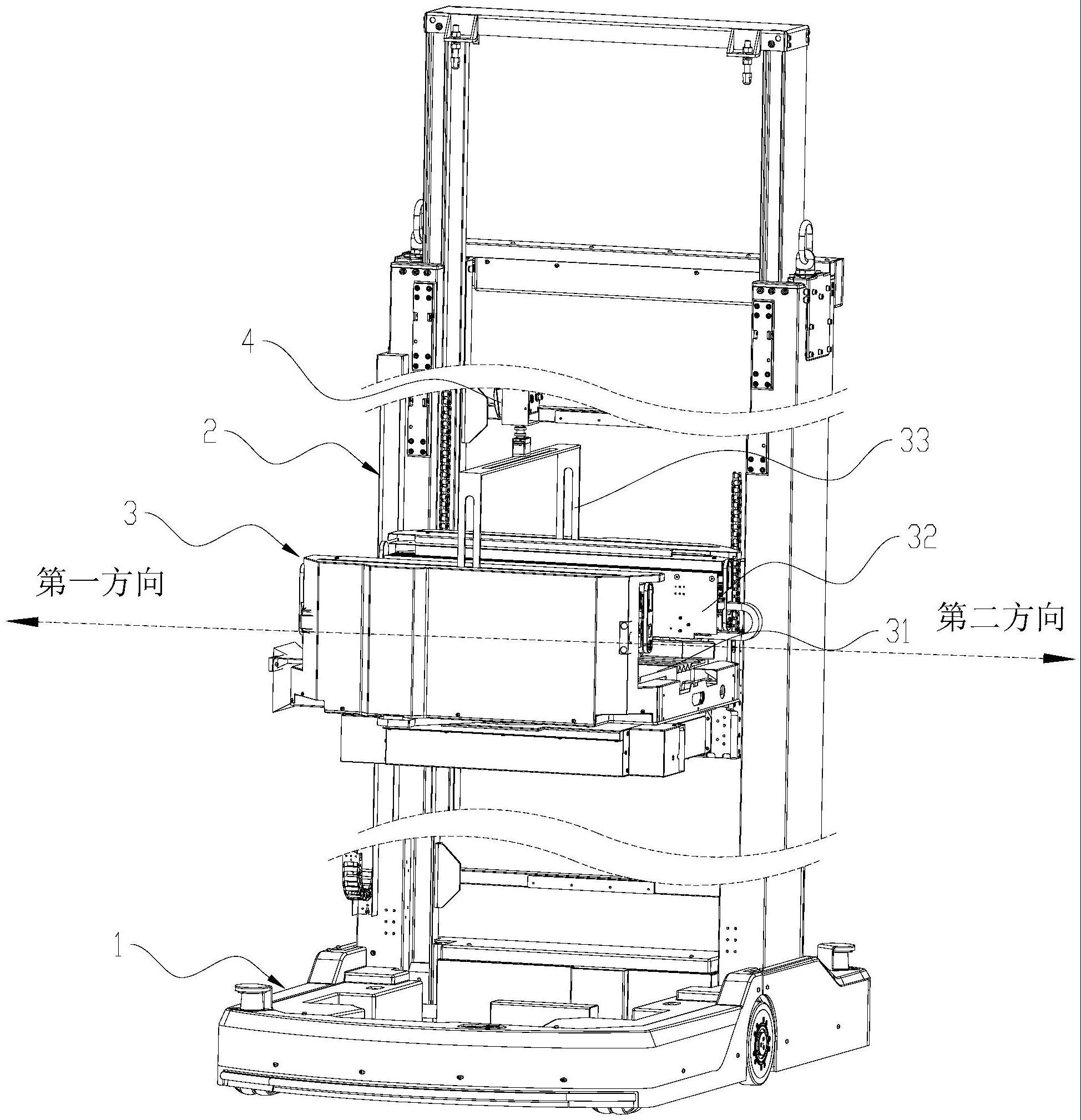
3、底盘组件;
4、门架组件,所述门架组件设置在所述底盘组件上;
5、取放组件,所述取放组件设置在所述门架组件上,且被构造为沿着门架组件在高度方向上运动;所述取放组件包括取放机构,所述取放机构被构造为向第一方向伸出,以完成对第一方向上容器的取放;以及被构造为向与第一方向相反的第二方向伸出,以完成对第二方向上容器的取放;
6、图像采集装置,所述图像采集装置被配置为当取放组件对第一方向上的容器进行取放,转动至面向第一方向以采集第一方向上容器的信息;以及被构造为当取放组件对第二方向上的容器进行取放,转动至面向第二方向以采集第二方向上容器的信息。
7、在本公开的一个实施例中,所述取放机构包括:
8、基座,所述基座上设置有贯穿其相对两端的承载位;
9、至少一级的伸缩叉,所述伸缩叉与所述基座导向配合,且被构造为由基座往第一方向伸出,以完成对第一方向上容器的取放;以及被构造为由基座往第二方向伸出,以完成对第二方向上容器的取放。
10、在本公开的一个实施例中,所述图像采集装置转动连接在所述基座上,且被构造为转动至面向第一方向或第二方向。
11、在本公开的一个实施例中,在所述基座上设置有支架,所述图像采集装置转动连接在支架上位于所述承载位上方的位置。
12、在本公开的一个实施例中,所述图像采集装置被构造为通过安装座转动连接在所述支架上;在所述支架与安装座之间偏离安装座转动轴线的位置设置有导向机构,所述安装座被构造为沿着导向机构的延伸方向相对于支架转动至第一方向、第二方向。
13、在本公开的一个实施例中,所述导向机构包括设置在安装座上的导向槽,以及固定在支架上且与所述导向槽配合的导向柱;或者是,所述导向机构包括设置在安装座上的导向柱,以及固定在支架上且与所述导向柱配合的导向槽。
14、在本公开的一个实施例中,所述支架与所述基座导向配合,且被构造为当伸缩叉对第一方向或第二方向上的容器进行取放,相对于基座运动至预定位置。
15、在本公开的一个实施例中,所述支架被构造为当伸缩叉对第一方向上的容器进行取放,相对于基座往第一方向运动至预定位置;以及当伸缩叉对第二方向上的容器进行取放,相对于基座往第二方向运动至预定位置。
16、在本公开的一个实施例中,所述伸缩叉被构造为对第一方向上第一深位上的容器进行取放时,所述支架被构造为运动至基座的第一位置;
17、所述伸缩叉被构造为对第一方向上第二深位上的容器进行取放时,所述支架被构造为运动至基座的第二位置;
18、所述伸缩叉被构造为对第二方向上第一深位上的容器进行取放时,所述支架被构造为运动至基座的第三位置;
19、所述伸缩叉被构造为对第一方向上第二深位上的容器进行取放时,所述支架被构造为运动至基座的第四位置。
20、在本公开的一个实施例中,所述第一位置、第二位置、第三位置、第四位置中至少有两个位置相同;或者是,所述第一位置、第二位置、第三位置、第四位置均不同。
21、在本公开的一个实施例中,所述支架被构造为在位于第一方向上的第一位置和第二方向上的第二位置之间运动,所述第一位置、第二位置分别位于基座相对的开口端位置;
22、所述支架位于第一位置时,所述伸缩叉被构造为对第一方向上第二深位或者位于第二方向第一深位上的容器进行取放;
23、所述支架位于第二位置时,所述伸缩叉被构造为对第一方向上第一深位或者位于第二方向第二深位上的容器进行取放。
24、在本公开的一个实施例中,包括上述的搬运机器人,所述取放组件设置在所述门架组件的其中一侧,所述取放机构的伸出方向被构造为与所述搬运机器人的行走方向垂直。
25、根据本公开的第二方面,提供了一种仓储系统,该仓储系统包括:控制服务器、仓储区、上述的搬运机器人;其中,所述仓储区包括由相邻第一载具、第二载具围成的巷道;所述搬运机器人被构造为基于所述控制服务器下方的取放指令行走至巷道中,并对位于第一载具和/或第二载具上的容器进行转移。
26、本公开的一个有益效果在于,图像采集装置无需依靠取放组件,其自身就可以独立完成从第一方向转动至第二方向的转向动作,或者是从第二方向转动至第一方向的转向动作,相比于现有技术中图像采集装置需要依靠取放组件的转向才可以完成转向采集图像,本公开的图像采集装置的转向过程更加方便快捷;相比于现有技术中设置两个或多个图像采集装置才可以对两个方向的容器进行图像采集,本公开设置单独的图像采集装置依靠其转向功能就可以完成两个方向上容器的采集工作,减少了图像采集装置设置的数量,节约了成本。
27、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
技术特征:
1.一种搬运机器人,其特征在于,包括:
2.根据权利要求1所述的搬运机器人,其特征在于,所述取放机构包括:
3.根据权利要求2所述的搬运机器人,其特征在于,所述图像采集装置(4)转动连接在所述基座(31)上,且被构造为转动至面向第一方向或第二方向。
4.根据权利要求2所述的搬运机器人,其特征在于,在所述基座(31)上设置有支架(33),所述图像采集装置(4)转动连接在支架(33)上位于所述承载位(311)上方的位置。
5.根据权利要求4所述的搬运机器人,其特征在于,所述图像采集装置(4)被构造为通过安装座(34)转动连接在所述支架(33)上;在所述支架(33)与安装座(34)之间偏离安装座(34)转动轴线的位置设置有导向机构,所述安装座(34)被构造为沿着导向机构的延伸方向相对于支架(33)转动至第一方向、第二方向。
6.根据权利要求5所述的搬运机器人,其特征在于,所述导向机构包括设置在安装座(34)上的导向槽(341),以及固定在支架(33)上且与所述导向槽(341)配合的导向柱(331);或者是,所述导向机构包括设置在安装座(34)上的导向柱,以及固定在支架(33)上且与所述导向柱(331)配合的导向槽。
7.根据权利要求4所述的搬运机器人,其特征在于,所述支架(33)与所述基座(31)导向配合,且被构造为当伸缩叉(32)对第一方向或第二方向上的容器进行取放,相对于基座(31)运动至预定位置。
8.根据权利要求7所述的搬运机器人,其特征在于,所述支架(33)被构造为当伸缩叉(32)对第一方向上的容器进行取放,相对于基座(31)往第一方向运动至预定位置;以及当伸缩叉(32)对第二方向上的容器进行取放,相对于基座(31)往第二方向运动至预定位置。
9.根据权利要求8所述的搬运机器人,其特征在于,
10.根据权利要求9所述的搬运机器人,其特征在于,所述第一位置、第二位置、第三位置、第四位置中至少有两个位置相同;或者是,所述第一位置、第二位置、第三位置、第四位置均不同。
11.根据权利要求7所述的搬运机器人,其特征在于,所述支架(33)被构造为在位于第一方向上的第一位置和第二方向上的第二位置之间运动,所述第一位置、第二位置分别位于基座(31)相对的开口端位置;
12.根据权利要求1至11任一项所述的搬运机器人,其特征在于,所述取放组件(3)设置在所述门架组件(2)的其中一侧,所述取放机构的伸出方向被构造为与所述搬运机器人的行走方向垂直。
13.一种仓储系统,其特征在于,包括:控制服务器、仓储区、根据权利要求1至12任一项所述的搬运机器人;其中,所述仓储区包括由相邻第一载具(51)、第二载具(52)围成的巷道;所述搬运机器人被构造为基于所述控制服务器下方的取放指令行走至巷道中,并对位于第一载具(51)和/或第二载具(52)上的容器进行转移。
技术总结
本公开涉及一种搬运机器人和仓储系统,该搬运机器人包括底盘组件、门架组件、取放组件和图像采集装置。取放组件包括取放机构,取放机构被构造为向第一方向伸出,以完成对第一方向上容器的取放;以及被构造为向与第一方向相反的第二方向伸出,以完成对第二方向上容器的取放;图像采集装置被配置为当取放组件对第一方向或第二方向上的容器进行取放,转动至面向第一方向或第二方向以采集第一方向或第二方向上容器的信息。本公开的搬运机器人,通过一个图像采集装置的转动,即可实现其在两个方向上的图像信息采集,由此可提高信息采集的精度和灵活性,降低了使用的成本。
技术研发人员:刘海洋
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:20221123
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!