托盘装置和移动机器人的制作方法
本技术涉及机器人,更具体地,本技术涉及一种托盘装置和移动机器人。
背景技术:
1、随着科技的进步和时代的发展,现在越来越多的机器人开始进入我们的生活。在各类型的机器人中,移动配送机器人在民用领域出现最多,例如餐厅送餐、酒店送物等。目前,市面上的这类移动机器人,大部分都是一个移动底座和可以载物的上装组成,在利用移动机器人配送物品时,物品都放在上装的托盘上。
2、在现有技术中,移动机器人的上装和托盘相对于底座都是固定的,这样会导致在机器人上、下坡或者过沟、过坎时,托盘会相对水平面发生倾斜,影响物品的运输,甚至导致托盘上的物品倾倒。在此背景下,有必要提出一种能够保持平衡的托盘,以实现在机器人经过非水平路段时,托盘也能保持平稳的状态。
技术实现思路
1、本实用新型的一个目的是提供一种托盘装置和移动机器人,以至少解决背景技术中的技术问题之一。
2、根据本实用新型的一个方面,提供一种托盘装置,应用于移动机器人,包括:
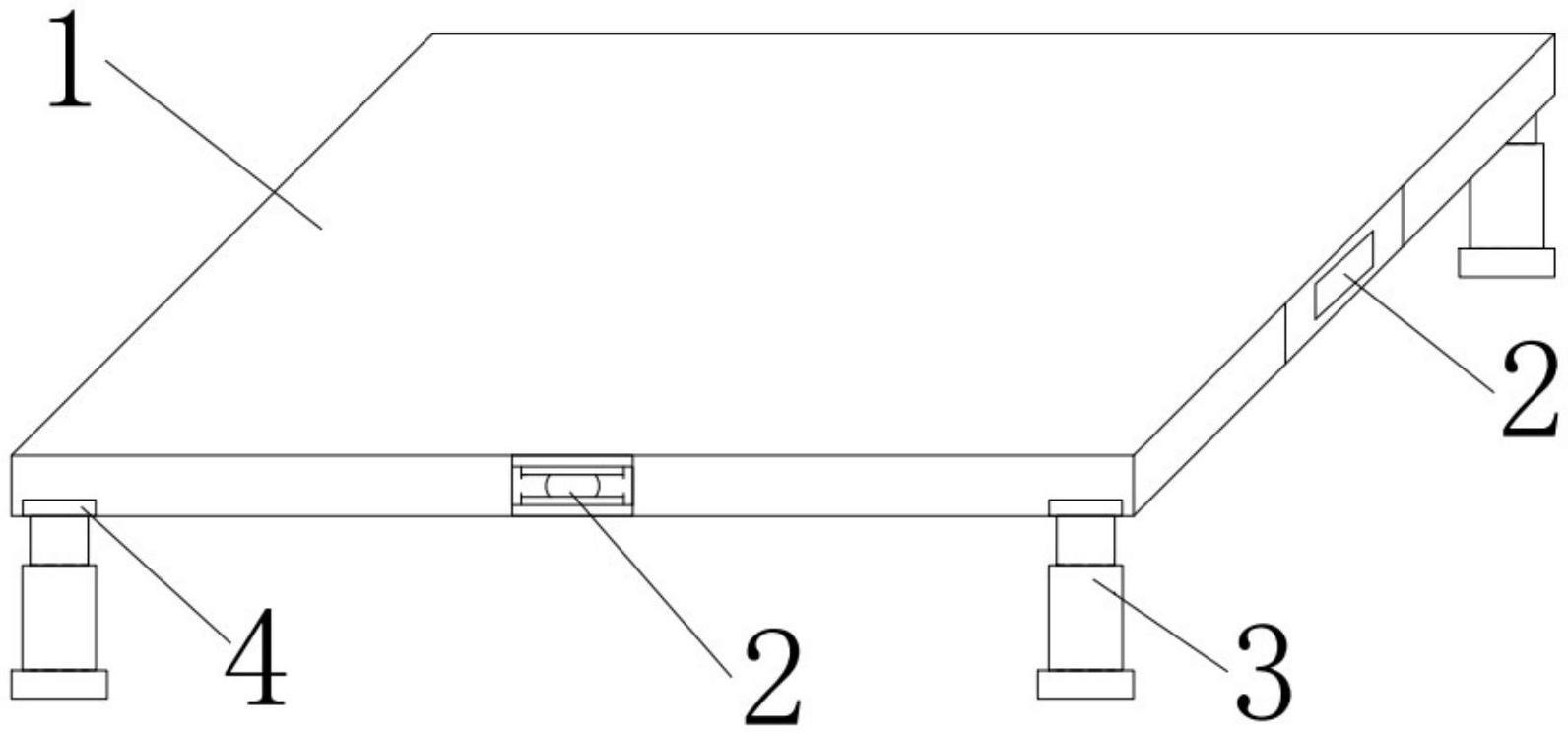
3、载物台,所述载物台具有水平状态和倾斜状态;
4、水平检测模块,所述水平检测模块设置于所述载物台上,并被配置为能够检测所述载物台所处的状态;
5、水平调节机构,所述水平调节机构连接于所述载物台上,并被配置为能够调节所述载物台所处的状态;
6、驱动模块,所述驱动模块与所述水平调节机构连接,并被配置为能够驱动所述水平调节机构,以调节所述载物台所处的状态;
7、控制模块,所述控制模块分别与水平检测模块和所述驱动模块连接;在所述水平检测模块检测到所述载物台处于所述倾斜状态的情况下,所述控制模块能够控制所述驱动模块驱动所述水平调节机构工作,以将所述载物台调节至所述水平状态。
8、可选地,所述水平检测模块为水银开关,在所述载物台处于所述倾斜状态的情况下,所述水银开关导通,以使所述控制模块能够控制所述驱动模块驱动所述水平调节机构工作,将所述载物台调节至所述水平状态。
9、可选地,所述水银开关至少设置有两个,至少两个所述水银开关分别沿不同方向布设于所述载物台的不同位置处。
10、可选地,所述水银开关为双向开关,并设置有四个,四个所述水银开关呈矩形分布在所述载物台的不同边缘处。
11、可选地,所述水银开关的工作角度设置为5°~10°。
12、可选地,所述水平调节机构包括多个活动顶杆,各所述活动顶杆分别连接于所述载物台的下方;
13、所述驱动模块包括电机,所述电机分别与所述控制模块和各所述活动顶杆连接,所述电机能够通过驱动各所述活动顶杆沿竖直方向伸缩,来调节所述载物台所处的状态。
14、可选地,所述载物台为矩形,所述活动顶杆设置有四个,并分别设置于所述载物台的四个拐角处;
15、所述电机的数量与所述活动顶杆的数量相匹配,各所述电机分别一一对应连接于各所述活动顶杆的下端。
16、可选地,各所述活动顶杆与所述载物台均为柔性连接。
17、可选地,所述托盘装置还包括设置于所述载物台上的称重传感器,所述称重传感器与所述控制模块连接,所述称重传感器被配置为能够对载物台负载的物品称重。
18、可选地,所述托盘装置还包括设置于所述载物台上的加热模块和/或制冷模块,所述加热模块和/或制冷模块与所述控制模块连接;
19、所述加热模块被配置为能够对所述载物台加热,所述制冷模块被配置为能够对所述载物台制冷。
20、根据本实用新型的第二方面,提供了一种移动机器人,包括:移动底座和第一方面所述的托盘装置;所述托盘装置通过所述水平调节机构连接在所述移动底座上。
21、本实用新型的一个技术效果在于,本实用新型通过在载物台上设置水平检测模块和水平调节机构,使得在载物台处于倾斜的情况下,控制模块能够控制驱动模块驱动水平调节机构将载物台从倾斜状态调节至水平状态,实现了自动调节载物台所处的状态的目的。
22、将上述托盘装置应用于移动机器人时,托盘装置能够在移动机器人经过非水平路段时自动调节至水平状态,提高了移动机器人在利用托盘装置配送物品时的平稳性和安全性。
23、通过以下参照附图对本实用新型的示例性实施例的详细描述,本实用新型的其它特征及其优点将会变得清楚。
技术特征:
1.一种托盘装置,应用于移动机器人,其特征在于,包括:
2.根据权利要求1所述的托盘装置,其特征在于,所述水平检测模块为水银开关,在所述载物台处于所述倾斜状态的情况下,所述水银开关导通,以使所述控制模块能够控制所述驱动模块驱动所述水平调节机构工作,将所述载物台调节至所述水平状态。
3.根据权利要求2所述的托盘装置,其特征在于,所述水银开关至少设置有两个,至少两个所述水银开关分别沿不同方向布设于所述载物台的不同位置处。
4.根据权利要求2所述的托盘装置,其特征在于,所述水银开关为双向开关,并设置有四个,四个所述水银开关呈矩形分布在所述载物台的不同边缘处。
5.根据权利要求2所述的托盘装置,其特征在于,所述水银开关的工作角度设置为5°~10°。
6.根据权利要求1所述的托盘装置,其特征在于,所述水平调节机构包括多个活动顶杆,各所述活动顶杆分别连接于所述载物台的下方;
7.根据权利要求6所述的托盘装置,其特征在于,所述载物台为矩形,所述活动顶杆设置有四个,并分别设置于所述载物台的四个拐角处;
8.根据权利要求6所述的托盘装置,其特征在于,各所述活动顶杆与所述载物台均为柔性连接。
9.根据权利要求1所述的托盘装置,其特征在于,还包括设置于所述载物台上的称重传感器,所述称重传感器与所述控制模块连接,所述称重传感器被配置为能够对载物台负载的物品称重。
10.根据权利要求1所述的托盘装置,其特征在于,还包括设置于所述载物台上的加热模块和/或制冷模块,所述加热模块和/或制冷模块与所述控制模块连接;
11.一种移动机器人,其特征在于,包括:移动底座和权利要求1-10任意一项所述的托盘装置;所述托盘装置通过所述水平调节机构连接在所述移动底座上。
技术总结
本技术涉及一种托盘装置和移动机器人。托盘装置包括:载物台、水平检测模块、水平调节机构、驱动模块和控制模块;载物台具有水平状态和倾斜状态;水平检测模块设置于载物台上;水平调节机构连接于载物台上;驱动模块与水平调节机构连接,并被配置为能够驱动水平调节机构,以调节载物台所处的状态;控制模块分别与水平检测模块和驱动模块连接;在水平检测模块检测到载物台处于倾斜状态的情况下,控制模块控制驱动模块驱动水平调节机构工作,以将载物台调节至水平状态。将本技术提供的托盘装置应用于移动机器人时,托盘装置能够在移动机器人经过非水平路段时保持水平状态,提高了移动机器人在利用托盘装置配送物品时的平稳性和安全性。
技术研发人员:杨逸伦,张云龙,程波
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!