一种智能旋转夹爪的制作方法
本技术涉及医疗器械及自动化领域,尤其涉及一种智能旋转夹爪。
背景技术:
1、现有技术的医疗器械领域中,无专门用于圆柱形医疗器械的转移及开盖的夹爪,而直接将其它领域的夹爪应用于医疗器械领域时,存在以下问题:1、夹持力不够,无法保证转移过程中的稳定性;2、只能实现夹持物体转移过程中的旋转,进行开盖操作时,由于夹持力不够,因此无法实现开盖操作,导致其实用性较低。
2、因此,现有技术存在缺陷,需要改进。
技术实现思路
1、本实用新型的目的是克服现有技术的不足,提供一种智能旋转夹爪,解决现有技术中,夹爪件的夹持力不够,夹持过程中稳定性低的问题;同时解决现有技术中的夹爪件无法实现医疗器械领域的圆柱形器械的开盖操作的问题。
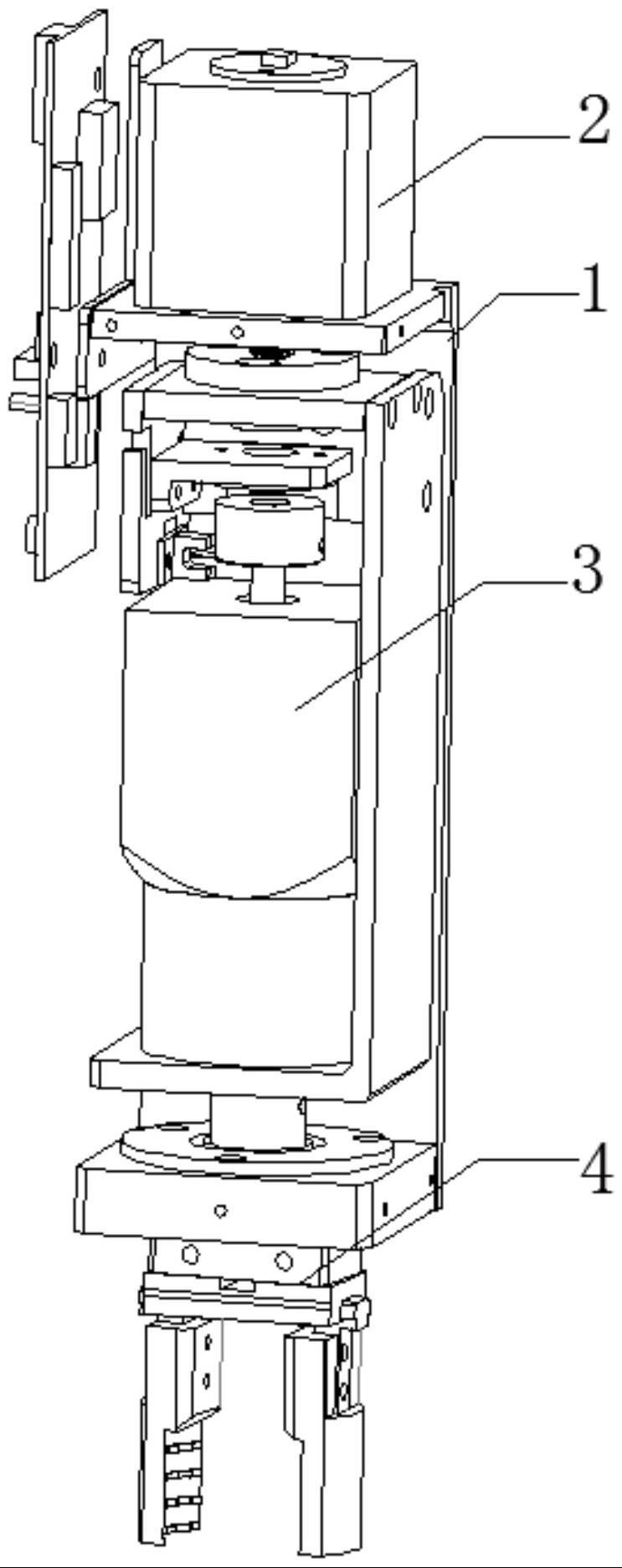
2、本实用新型的技术方案如下:一种智能旋转夹爪,包括:固定座、安装在所述固定座上的夹持控制件、旋转驱动件、与所述旋转驱动件输出端连接的夹爪件,所述夹爪件包括:两组弧形夹爪、连杆件,所述连杆件用于在所述夹持控制件的拉持作用下控制两组弧形夹爪向相互靠近一侧移动;所述旋转驱动件用于控制所述夹爪件旋转。
3、进一步地,所述夹持控制件包括:安装在所述固定座上的第一旋转驱动装置、与所述第一旋转驱动装置输出端连接的螺杆、与所述螺杆螺纹连接的升降座。
4、进一步地,所述旋转驱动件包括:安装在所述升降座上的第二旋转驱动装置、与所述第二旋转驱动装置输出端连接的旋转轴。
5、进一步地,所述连杆件包括:连杆筒体、设置在所述连杆筒体内的主轴杆、可旋转地连接于所述主轴杆上的第一转轴、套在所述第一转轴上的两个连杆、可旋转地设置在所述连杆筒体内的两个第二转轴;所述的两个连杆对称设置于主轴杆的两侧,所述的两个连杆分别设置于两个第二转轴上;所述连杆筒体设置在所述固定座的下侧,所述固定座套在所述主轴杆的外侧。
6、进一步地,所述夹爪件还包括:与所述连杆筒体连接的导轨、设置在所述导轨上的滑动爪,所述连杆的一端伸入至所述导轨内与所述滑动爪连接,所述弧形夹爪与所述滑动爪连接。
7、进一步地,所述旋转驱动件还包括:连接于所述第二旋转驱动装置上的同步旋转轮、与所述同步旋转轮连接的感应片、安装在所述升降座上的凹槽感应器,所述感应片与所述凹槽感应器相配合。
8、进一步地,所述升降座的底部连接有滑块,所述固定座上设置有与所述滑块相配合的滑轨。
9、进一步地,所述弧形夹爪内设置有若干组锯齿防滑纹路。
10、采用上述方案,本实用新型提供一种智能旋转夹爪,具有以下有益效果:
11、1、夹紧力的大小可通过夹持控制件给连杆件施加的拉力来决定,可根据具体需求,调整夹持力的大小,实用性更强;
12、2、可提供足够的夹持力,夹持效果更好,不会出现夹持力不够的问题,同时可在开盖过程中提供足够的夹持力、旋转力,保证开盖效果好;
13、3、结构简单、紧凑,方便生产组装。
技术特征:
1.一种智能旋转夹爪,其特征在于,包括:固定座、安装在所述固定座上的夹持控制件、旋转驱动件、与所述旋转驱动件输出端连接的夹爪件,所述夹爪件包括:两组弧形夹爪、连杆件,所述连杆件用于在所述夹持控制件的拉持作用下控制两组弧形夹爪向相互靠近一侧移动;所述旋转驱动件用于控制所述夹爪件旋转;
2.根据权利要求1所述一种智能旋转夹爪,其特征在于,所述旋转驱动件包括:安装在所述升降座上的第二旋转驱动装置、与所述第二旋转驱动装置输出端连接的旋转轴。
3.根据权利要求1所述一种智能旋转夹爪,其特征在于,所述连杆件包括:连杆筒体、设置在所述连杆筒体内的主轴杆、可旋转地连接于所述主轴杆上的第一转轴、套在所述第一转轴上的两个连杆、可旋转地设置在所述连杆筒体内的两个第二转轴;所述的两个连杆对称设置于主轴杆的两侧,所述的两个连杆分别设置于两个第二转轴上;所述连杆筒体设置在所述固定座的下侧,所述固定座套在所述主轴杆的外侧。
4.根据权利要求3所述一种智能旋转夹爪,其特征在于,所述夹爪件还包括:与所述连杆筒体连接的导轨、设置在所述导轨上的滑动爪,所述连杆的一端伸入至所述导轨内与所述滑动爪连接,所述弧形夹爪与所述滑动爪连接。
5.根据权利要求2所述一种智能旋转夹爪,其特征在于,所述旋转驱动件还包括:连接于所述第二旋转驱动装置上的同步旋转轮、与所述同步旋转轮连接的感应片、安装在所述升降座上的凹槽感应器,所述感应片与所述凹槽感应器相配合。
6.根据权利要求1所述一种智能旋转夹爪,其特征在于,所述升降座的底部连接有滑块,所述固定座上设置有与所述滑块相配合的滑轨。
7.根据权利要求1所述一种智能旋转夹爪,其特征在于,所述弧形夹爪内设置有若干组锯齿防滑纹路。
技术总结
本技术公开一种智能旋转夹爪,包括:固定座、安装在所述固定座上的夹持控制件、旋转驱动件、与所述旋转驱动件输出端连接的夹爪件,所述夹爪件包括:两组弧形夹爪、连杆件,所述连杆件用于在所述夹持控制件的拉持作用下控制两组弧形夹爪向相互靠近一侧移动;所述旋转驱动件用于控制所述夹爪件旋转。本技术的弧形夹爪的夹紧力的大小可通过夹持控制件给连杆件施加的拉力来决定,可根据具体需求,调整夹持力的大小,实用性更强。
技术研发人员:欧阳德强
受保护的技术使用者:深圳市乐诚生物科技有限公司
技术研发日:20221207
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!