用于立体库堆垛机的智能小车的制作方法
本技术涉及智能小车,具体为用于立体库堆垛机的智能小车。
背景技术:
1、随着工业的发展、电商的涌现、人力成本的剧增使得自动化仓储成为趋势,传统仓储物流劳动力效率低、人力成本高,已经无法满足企业高效运转的需求,自动化立体仓库应用而生,自动化立体仓库系统主要由货架、堆垛机、智能小车、堆垛机、穿梭机、传输设备、控制系统、管理监控系统等部分组成,能够按照指令自动完成货物的存取,并能对库存货物进行自动管理,实现自动化作业,智能小车是自动化物流系统中的关键设备之一,为现代制造业物流和自动化立体库堆垛机提供了一种高度柔性化和重要的自动化运输方式。
2、智能小车通常装备有电磁、激光或视觉等自动导引装置,在计算机和无线局域网的控制下,经导向装置引导并沿程序设定路径运行完成作业的无人驾驶自动小车,其大多具有自动移动输送的功能,但在运行时不利于对物料进行水平和高度调节式输送,来进行多位置调节物料与立体库堆垛机适配摆放物料,极大的影响了对物料的输送范围和输送的便利性;同时智能小车大多采用轮式结构,当遇到光滑路面或者泥泞路面时极易发生打滑,不利于进行防滑式可靠的输送,大大的影响了物料输送摆放的效率。
技术实现思路
1、本实用新型的目的在于提供用于立体库堆垛机的智能小车,以解决上述背景技术中提出智能小车不便于对物料水平和高度调节式输送,方便多位置调节物料与立体库堆垛机适配摆放物料的问题。
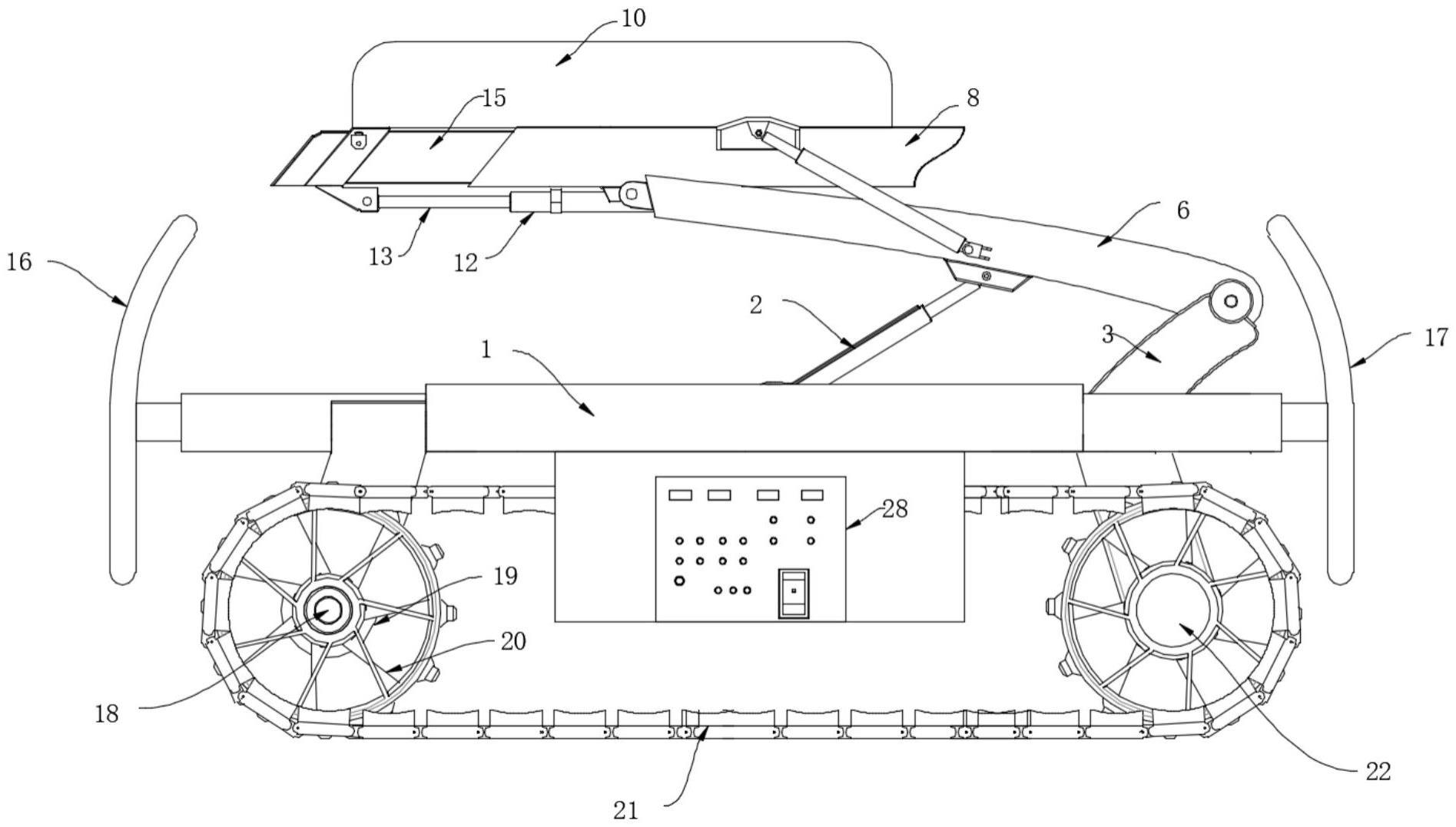
2、为实现上述目的,本实用新型提供如下技术方案:用于立体库堆垛机的智能小车,包括智能小车架和支臂,所述智能小车架的顶端安装有支臂,所述支臂的顶端设有提升臂,所述提升臂靠近支臂的一端设有活动轴,所述提升臂的顶端设有推送臂,所述推送臂下方的提升臂顶端设有三级连轴,所述推送臂的顶端安装有物料箱,所述物料箱下方的推送臂内部设有伸缩臂,且伸缩臂的一端延伸至推送臂的外部,所述提升臂下方的智能小车架顶端设有第一伸缩驱动件,所述第一伸缩驱动件的顶端设有一级连轴,所述提升臂的侧壁上安装有第二伸缩驱动件,所述第二伸缩驱动件的顶端安装有二级连轴,所述推送臂的底端安装有第三伸缩驱动件,所述第三伸缩驱动件的输出端安装有推杆,所述推杆远离第三伸缩驱动件的一端安装有转接架。
3、优选的,所述智能小车架一侧的外壁上安装有前防护杠,所述智能小车架另一侧的外壁上安装有后防护杠。
4、优选的,所述智能小车架的底端安装有左旋转驱动件,所述左旋转驱动件一侧的智能小车架底端安装有右旋转驱动件。
5、优选的,所述左旋转驱动件的输出端安装有左驱动轴,所述左驱动轴远离左旋转驱动件的一端安装有左坦克轮,所述智能小车架底端远离左坦克轮的一侧安装有前坦克轮,所述前坦克轮的表面设有左坦克链,且左坦克链的一端延伸至左坦克轮的表面。
6、优选的,所述右旋转驱动件的输出端安装有右驱动轴,所述右驱动轴远离右旋转驱动件的一端安装有右坦克轮,所述智能小车架底端远离右坦克轮的一侧安装有后坦克轮,所述后坦克轮的表面设有右坦克链,且右坦克链的一端延伸至右坦克轮的表面。
7、优选的,所述智能小车架的侧壁上安装有控制面板,所述控制面板的输出端与第一伸缩驱动件、第二伸缩驱动件、第三伸缩驱动件、左旋转驱动件和右旋转驱动件的输入端电性连接。
8、与现有技术相比,本实用新型的有益效果是:该智能小车不仅实现了智能小车对物料水平和高度调节式输送,方便了多位置调节物料与立体库堆垛机适配摆放物料,而且提高了立体库物料堆垛的效率;
9、(1)通过第一伸缩驱动件驱动提升臂以活动轴为轴进行转动,来对提升臂进行调节,第二伸缩驱动件驱动推送臂以三级连轴为轴进行转动,来对推送臂进行调节,在第一伸缩驱动件和第二伸缩驱动件的控制下,由推送臂驱动物料箱进行提升移动,由第三伸缩驱动件驱动推杆移动,由推杆驱动转接架移动,伸缩臂从推送臂的内部移出,来进行水平调节输送,来与立体库堆垛机适配,实现了智能小车对物料水平和高度调节式输送,方便了多位置调节物料与立体库堆垛机适配摆放物料,提高了立体库物料堆垛的效率;
10、(2)通过将前防护杠与智能小车架安装一起,将后防护杠与智能小车架安装一起,来提高智能小车的防撞保护性能,实现了智能小车前后可靠的防撞保护性能,提高了智能小车行走时的安全性;
11、(3)通过由左旋转驱动件驱动左驱动轴旋转,由左驱动轴驱动左坦克轮转动,由左坦克轮驱动左坦克链移动,由右旋转驱动件驱动右驱动轴旋转,由右坦克链和左坦克链配合驱动智能小车移动,来增加智能小车移动时的抓地力,实现了智能小车稳定抓地行走移动,防止了智能小车移动时发生打滑。
技术特征:
1.用于立体库堆垛机的智能小车,包括智能小车架(1)和支臂(3),其特征在于:所述智能小车架(1)的顶端安装有支臂(3),所述支臂(3)的顶端设有提升臂(6),所述提升臂(6)靠近支臂(3)的一端设有活动轴(4),所述提升臂(6)的顶端设有推送臂(8),所述推送臂(8)下方的提升臂(6)顶端设有三级连轴(11),所述推送臂(8)的顶端安装有物料箱(10),所述物料箱(10)下方的推送臂(8)内部设有伸缩臂(15),且伸缩臂(15)的一端延伸至推送臂(8)的外部,所述提升臂(6)下方的智能小车架(1)顶端设有第一伸缩驱动件(2),所述第一伸缩驱动件(2)的顶端设有一级连轴(5),所述提升臂(6)的侧壁上安装有第二伸缩驱动件(7),所述第二伸缩驱动件(7)的顶端安装有二级连轴(9),所述推送臂(8)的底端安装有第三伸缩驱动件(12),所述第三伸缩驱动件(12)的输出端安装有推杆(13),所述推杆(13)远离第三伸缩驱动件(12)的一端安装有转接架(14)。
2.根据权利要求1所述的用于立体库堆垛机的智能小车,其特征在于:所述智能小车架(1)一侧的外壁上安装有前防护杠(16),所述智能小车架(1)另一侧的外壁上安装有后防护杠(17)。
3.根据权利要求1所述的用于立体库堆垛机的智能小车,其特征在于:所述智能小车架(1)的底端安装有左旋转驱动件(19),所述左旋转驱动件(19)一侧的智能小车架(1)底端安装有右旋转驱动件(25)。
4.根据权利要求3所述的用于立体库堆垛机的智能小车,其特征在于:所述左旋转驱动件(19)的输出端安装有左驱动轴(18),所述左驱动轴(18)远离左旋转驱动件(19)的一端安装有左坦克轮(20),所述智能小车架(1)底端远离左坦克轮(20)的一侧安装有前坦克轮(22),所述前坦克轮(22)的表面设有左坦克链(21),且左坦克链(21)的一端延伸至左坦克轮(20)的表面。
5.根据权利要求3所述的用于立体库堆垛机的智能小车,其特征在于:所述右旋转驱动件(25)的输出端安装有右驱动轴(23),所述右驱动轴(23)远离右旋转驱动件(25)的一端安装有右坦克轮(24),所述智能小车架(1)底端远离右坦克轮(24)的一侧安装有后坦克轮(27),所述后坦克轮(27)的表面设有右坦克链(26),且右坦克链(26)的一端延伸至右坦克轮(24)的表面。
6.根据权利要求1所述的用于立体库堆垛机的智能小车,其特征在于:所述智能小车架(1)的侧壁上安装有控制面板(28),所述控制面板(28)的输出端与第一伸缩驱动件(2)、第二伸缩驱动件(7)、第三伸缩驱动件(12)、左旋转驱动件(19)和右旋转驱动件(25)的输入端电性连接。
技术总结
本技术公开了用于立体库堆垛机的智能小车,包括智能小车架和支臂,智能小车架的顶端安装有支臂,支臂的顶端设有提升臂,提升臂靠近支臂的一端设有活动轴,提升臂的顶端设有推送臂,推送臂下方的提升臂顶端设有三级连轴,推送臂的顶端安装有物料箱,物料箱下方的推送臂内部设有伸缩臂,且伸缩臂的一端延伸至推送臂的外部,提升臂下方的智能小车架顶端设有第一伸缩驱动件,第一伸缩驱动件的顶端设有一级连轴。本技术不仅实现了智能小车对物料水平和高度调节式输送,方便了多位置调节物料与立体库堆垛机适配摆放物料,而且提高了立体库物料堆垛的效率。
技术研发人员:许振华,刘子阳,付建军
受保护的技术使用者:湖南中科海利科技有限公司
技术研发日:20221215
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!