一种无人船收放装置的制作方法
本技术涉及收放装置,特别是涉及一种无人船收放装置。
背景技术:
1、无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人。无人船已经广泛运用,用于执行各种任务。
2、但是现有的无人船收放大多采用货车或者船只搭配葫芦吊进行吊放到海上或者回收,其收放成本高,且效率低,不利于无人船的大量投放。
技术实现思路
1、本实用新型的目的是提供一种无人船收放装置,其可以保证无人船收放的稳定性和承重范围,提高无人船收放的效率和便利性。
2、为了解决上述技术问题,本实用新型提供一种无人船收放装置,其用于在岸体和海上之间收放无人船;包括:
3、升降驱动机构,所述升降驱动机构安装于所述岸体;
4、底板,所述底板与所述升降驱动机构连接;
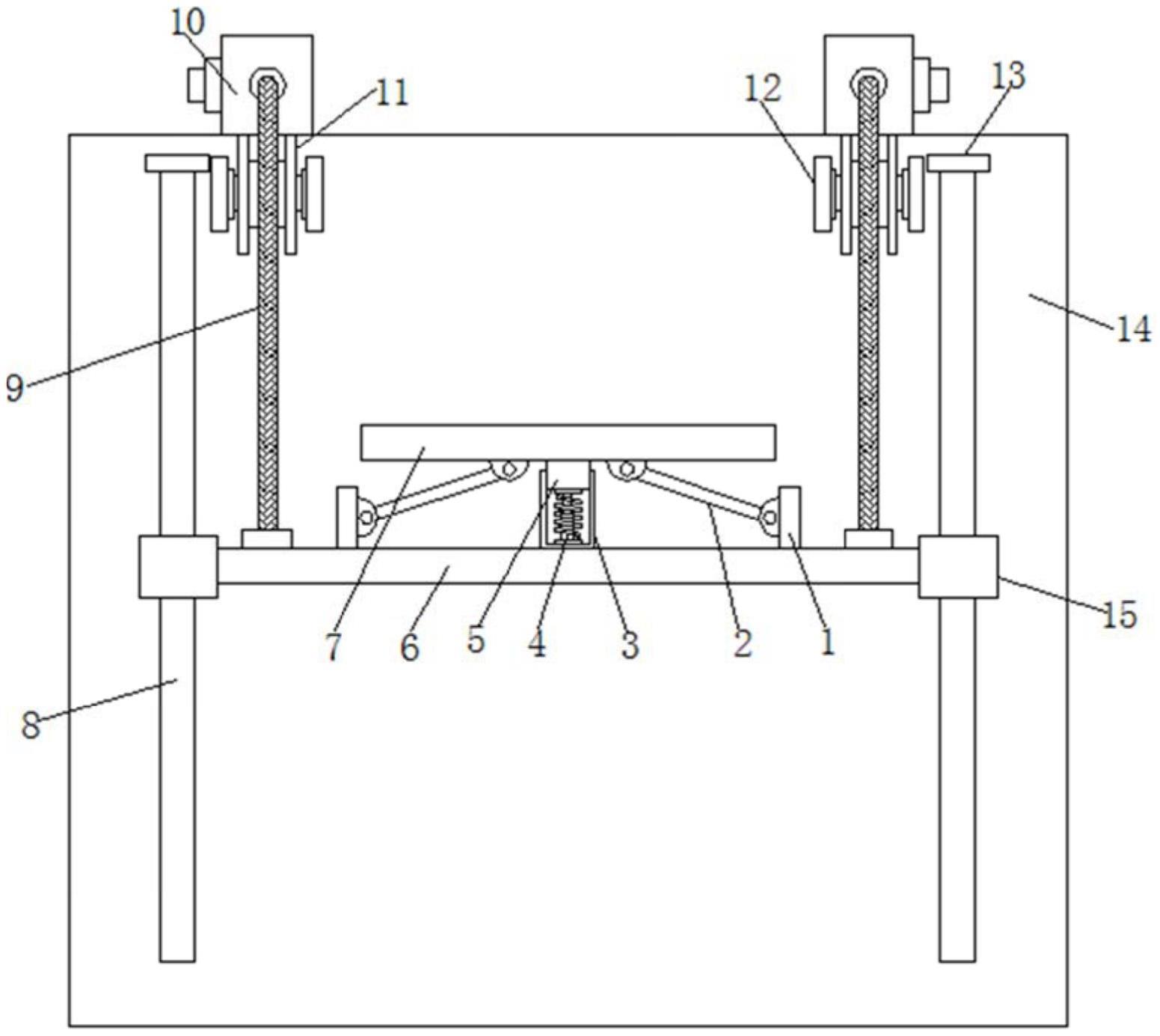
5、支撑机构,所述支撑机构包括放置板、阻尼组件、两个竖板和多个连接杆;两个所述竖板相对设置于所述底板的顶面;所述连接杆的一端与所述竖板铰接;所述放置板的底面与所述连接杆的另一端铰接;所述阻尼组件安装于所述底板的顶面,所述阻尼组件的顶面连接所述放置板的底面。
6、优选地,所述升降驱动机构为卷扬机,所述卷扬机通过连接绳与所述底板连接。
7、优选地,所述无人船收放装置还包括牵引机构,所述牵引机构包括固定板和活动轮,所述固定板的一端连接所述岸体,所述固定板的另一端连接所述活动轮;所述连接绳抵接于所述活动轮。
8、优选地,所述卷扬机和所述牵引机构均设置有两个,两个所述卷扬机对称设置于所述岸体,所述牵引机构与所述卷扬机一一对应设置。
9、优选地,所述竖板设置于所述放置板的两侧,所述连接杆处于倾斜状态,且多个所述连接杆关于所述放置板竖向中心轴对称。
10、优选地,所述底板处于水平状态,且所述底板和所述岸体互相垂直。
11、优选地,所述无人船收放装置还包括稳定机构,所述稳定机构包括两个安装板、多个固定块和多个限位杆;两个所述安装板相对设置,且所述安装板的一端连接所述岸体;所述固定块设置于所述底板,且所述固定块开设有滑孔;所述限位杆竖直设置,且所述限位杆的一端与所述安装板连接,所述限位杆的另一端可滑动的穿过所述滑孔。
12、优选地,所述固定块和所述限位杆均设置有四个,所述固定块和所述限位杆一一对应设置;且四个所述固定块呈长方形分布设置于所述底板。
13、优选地,所述阻尼组件包括壳体、弹簧、导杆和插块,所述壳体为无盖空心结构;所述导杆竖直安装于所述壳体的内部,所述弹簧套设于所述导杆;所述插块可滑动的插设于所述壳体,所述插块的一端连接所述放置板的底面,所述插块的另一端连接所述弹簧。
14、优选地,所述阻尼组件设置有多个,多个所述阻尼组件依次呈直线布置。
15、本实用新型具有以下有益效果:
16、本实用新型的无人船收放装置通过利用升降驱动机构的驱动,以此便可以使得底板整体进行上下移动,从而便可以实现了对无人船的收放功能,由于放置板的底端设置有多个连接杆,通过利用连接杆和竖板的存在,可以增加放置板的承重范围,使得无人船能够稳定设置在放置板的顶端,并且利用阻尼组件,通过利用阻尼组件的弹性支撑,可以使得对无人船进行收放时,降低震动带来的影响,进一步的增加本装置的稳定性,以此便可以使得本装置具有稳定收放无人船的功能。
技术特征:
1.一种无人船收放装置,其用于在岸体和海上之间收放无人船;其特征在于,包括:
2.如权利要求1所述的无人船收放装置,其特征在于:所述升降驱动机构为卷扬机,所述卷扬机通过连接绳与所述底板连接。
3.如权利要求2所述的无人船收放装置,其特征在于:所述无人船收放装置还包括牵引机构,所述牵引机构包括固定板和活动轮,所述固定板的一端连接所述岸体,所述固定板的另一端连接所述活动轮;所述连接绳抵接于所述活动轮。
4.如权利要求3所述的无人船收放装置,其特征在于:所述卷扬机和所述牵引机构均设置有两个,两个所述卷扬机对称设置于所述岸体,所述牵引机构与所述卷扬机一一对应设置。
5.如权利要求1所述的无人船收放装置,其特征在于:所述竖板设置于所述放置板的两侧。
6.如权利要求1所述的无人船收放装置,其特征在于:所述底板处于水平状态,且所述底板和所述岸体互相垂直。
7.如权利要求1所述的无人船收放装置,其特征在于:所述无人船收放装置还包括稳定机构,所述稳定机构包括两个安装板、多个固定块和多个限位杆;两个所述安装板相对设置,且所述安装板的一端连接所述岸体;所述固定块设置于所述底板,且所述固定块开设有滑孔;所述限位杆竖直设置,且所述限位杆的一端与所述安装板连接,所述限位杆的另一端可滑动的穿过所述滑孔。
8.如权利要求7所述的无人船收放装置,其特征在于:所述固定块和所述限位杆均设置有四个,所述固定块和所述限位杆一一对应设置;且四个所述固定块呈长方形分布设置于所述底板。
9.如权利要求1所述的无人船收放装置,其特征在于:所述阻尼组件包括壳体、弹簧、导杆和插块,所述壳体为无盖空心结构;所述导杆竖直安装于所述壳体的内部,所述弹簧套设于所述导杆;所述插块可滑动的插设于所述壳体,所述插块的一端连接所述放置板的底面,所述插块的另一端连接所述弹簧。
10.如权利要求1所述的无人船收放装置,其特征在于:所述阻尼组件设置有多个,多个所述阻尼组件依次呈直线布置。
技术总结
本技术涉及收放装置技术领域,公开了一种无人船收放装置,包括升降驱动机构、底板和支撑机构,升降驱动机构安装于岸体;底板与升降驱动机构连接;支撑机构包括放置板、阻尼组件、两个竖板和多个连接杆;两个竖板相对设置于底板的顶面;连接杆的一端与竖板铰接;放置板的底面与连接杆的另一端铰接;阻尼组件安装于底板的顶面,阻尼组件的顶面连接放置板的底面。本技术的无人船收放装置可以保证无人船收放的稳定性和承重范围,提高无人船收放的效率和便利性。
技术研发人员:方忠平,李侠,李洪,张炎林,谢旭,杨军军,耿学强,倪梓威,玉元强
受保护的技术使用者:珠海华成电力设计院股份有限公司
技术研发日:20221221
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!