一种双深位齿轮齿条分级推拉式堆垛机货叉机构的制作方法
本技术在自动化立体仓库领域实现了一种双深位齿轮齿条分级推拉式堆垛机货叉机构。
背景技术:
1、堆垛机货叉机构是自动化立体库的关键基础零部件,同时双深位堆垛机货叉机构又比单深位货叉机构复杂的多,现有自动化立体仓库堆垛机双深位货叉机构基本上是采用齿轮、链条等差分联动机构设计实现的,在堆垛机货叉一级伸出时,通过联动机械带动二级、三级同时运动伸出,堆垛机货叉由一组电机动力驱动,这样的设计结构极其复杂,制造难度大,维修维护困难,因此应用市场上急需一种简单、经济、易于生产与维护的双深位堆垛机货叉机构。
技术实现思路
1、本实用新型针对现有双深位堆垛机货叉机构以上所述的不足之处,通过对每级导轨的伸缩设置一组单独的电机动力,用以替换现有堆垛机货叉复杂的联动机构,实现了与现有双深位堆垛机货叉相同的功能,进而提供了一种结构简单、便于制造、易于维护、成本较低的一种双深位齿轮齿条分级推拉式堆垛机货叉机构。
2、本实用新型的内容与实现技术方式如下。
3、本实用新型一种双深位齿轮齿条分级推拉式堆垛机货叉机构实现了一种货叉机构,包括至少三个可双向滑出的二级导轨、齿条、认址片、安装底板、电机及齿轮、槽形光电传感器,将齿条与认址片分别安装在导轨外侧,将三个二级导轨固定在一起,形成一个上、中、下三层可双向伸出的四级导轨,这个四级导轨就是货叉机构的机械部分,描述中所称的货叉通常是指这个四级导轨,三个二级导轨根据安装所处位置也描述为上层导轨、中层导轨与下层导轨,或者称为一级导轨、二级导轨、三级导轨,货叉的远深位工作伸出是由上层、中层、下层导轨的伸出共同组成的,伸叉与收叉通常是指个四级导轨的伸出与收回,将四级导轨、电机、槽形光电传感器固定在安装底板上,电机轴上面安装齿轮,分别与导轨外侧齿条啮合,认址片与槽形光电传感器相切合,四级导轨处于中位状态。
4、四级导轨处于中位时,上、中、下层导轨齿条与齿轮均处于啮合状态,上、中、下层槽形光电传感器与对应位置的认址片均处于切合状态。
5、双深位的货叉机构可以实现同一侧存取远近两排货架上面的托盘,因此其工作伸出有两种方式,一种是远深位伸出,一种是近深位伸出, 当需要向某个方向做远深货位的工作伸出时,与上层导轨啮合的电机齿轮首先运转,将上层导轨推出,达到限位后,与中层导轨啮合的电机齿轮开始运转,将中层导轨推出,当中层导轨达到限位后,与下层导轨啮合的电机齿轮也开始运转,将下层导轨推出至限位,此时电机齿轮均停止运转,完成一个完整的远深位伸出操作,当需要向某个方向做近深位的工作伸出时,原理与远深位伸出类似,只是下层导轨处于静止状态,此时与上层导轨啮合的电机齿轮首先运转,将上层导轨推出,达到限位后,与中层导轨啮合的电机齿轮开始运转,将中层导轨推出至限位,完成货叉的近深位工作伸出。
6、货叉的收回操作与伸出操作相反,远深位伸出收回时,上、中、下层电机同时运转,下层导轨首先被拉回中位,下层电机停止运转,此时中层电机所带动的齿轮已进入了啮合状态,通过运转将中层导轨拉回中位后电机停止运转,此时上层电机所带动的齿轮已进入了啮合状态,通过运转将上层导轨拉回中位后电机停止运转,完成收回操作,近深位伸出收回时,因下层导轨未参与伸出工作,因此,只有上层与中层导轨参与收回工作,即上、中层电机同时运转,中层导轨首先被拉回中位,中层电机停止运转,此时上层电机所带动的齿轮已进入了啮合状态,通过运转将上层导轨拉回中位后电机停止运转,完成货叉的近深位收回操作。
7、驱动上层导轨的两个电机为同步驱动运作电机,驱动中层导轨的两个电机为同步驱动运作电机,同样驱动下层导轨的两个电机也为同步驱动运作电机。
8、微调相应的槽形光电传感器与认址片的位置可以分别调整四级导轨的近深位与远深位的伸出限位。
9、本实用新型结构简单,生产制造与使用维护方便,无需专业的设计与生产设备,经济性好,便于在自动化立体仓库领域推广应用。
技术特征:
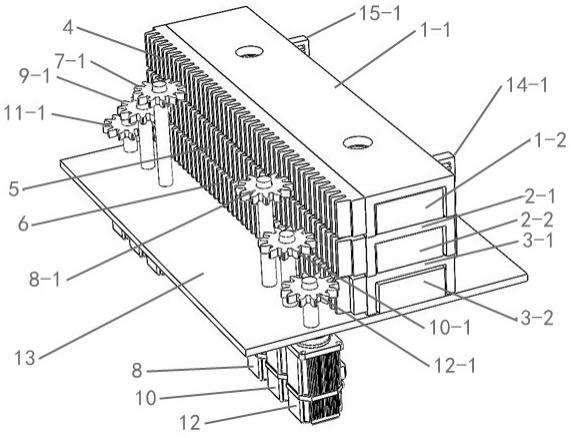
1.一种双深位齿轮齿条分级推拉式堆垛机货叉机构,其特征在于:包括一个可双向伸出的四级导轨,在四级导轨的一侧分别安装齿条a(4)、齿条b(5)、齿条c(6),将四级导轨固定在安装底板(13)上,四级导轨的远深位工作伸出由一级、二级、三级导轨伸出的长度总和构成,近深位工作伸出由一级、二级导轨伸出的长度总和构成,电机a(7)安装齿轮 a(7-1)、电机b(8)安装齿轮b(8-1)与齿条a(4)啮合,推动实现一级导轨伸出与收回,电机c(9)安装齿轮c(9-1)、电机d(10)安装齿轮d(10-1)与齿条b(5)啮合,推动实现二级导轨伸出与收回,电机e(11)安装齿轮e(11-1)、电机f(12)安装齿轮f(12-1)与齿条c(6)啮合,推动实现三级导轨伸出与收回,从而完成双深位齿轮齿条分级推拉式堆垛机货叉机构的工作伸出与收回。
2.根据权利要求1所述的一种双深位齿轮齿条分级推拉式堆垛机货叉机构,其特征在于:四级导轨由二级导轨 a(1)、二级导轨 b(2)、二级导轨 c(3)三个可双向拉伸的二级导轨固定在一起组成,二级导轨a(1)由u形外轨a(1-1)与内轨 b(1-2)组成,二级导轨b(2)由u形外轨c(2-1)与内轨d(2-2)组成,二级导轨c(3)由u形外轨e(3-1)与内轨f(3-2)组成,内轨b(1-2)与u形外轨c(2-1)固定,内轨d(2-2)与u形外轨e(3-1)固定,内轨f(3-2)固定在安装底板(13)上,在u形外轨 a(1-1)的一侧安装齿条a(4),另一侧安装认址片a(14)、认址片b(15),在u形外轨c(2-1)的一侧安装齿条b(5),另一侧安装认址片c(16)、认址片d(17),在u形外轨e(3-1)的一侧安装齿条c(6),另一侧安装认址片e(18)、认址片f(19),在四级导轨安装认址片一侧的安装底板(13)上,安装槽形光电传感器 a(14-1)、槽形光电传感器 b(15-1)、槽形光电传感器c(16-1)、槽形光电传感器x(16-2)、 槽形光电传感器y(17-2)、槽形光电传感器 d(17-1)、槽形光电传感器 e(18-1)、槽形光电传感器f(19-1),在四级导轨收合时,认址片a(14)与槽形光电传感器 a(14-1)切合,认证片b(15)与槽形光电传感器b(15-1)切合,认址片 c(16)与槽形光电传感器c(16-1)切合,认址片 d(17)与槽形光电传感器 d(17-1)切合,认址片e(18)与槽形光电传感器 e(18-1)切合,认址片f(19)与槽形光电传感器f(19-1)切合。
3.根据权利要求 2 所述的一种双深位齿轮齿条分级推拉式堆垛机货叉机构,其特征在于:四级导轨所包含的二级导轨a(1)、二级导轨b(2)、二级导轨c(3)的工作伸出限位,是可以进行调整的。
技术总结
本技术一种双深位齿轮齿条分级推拉式堆垛机货叉机构实现了一种货叉机构,包括可以双向滑出的四级导轨、齿条、认址片、安装底板、电机及齿轮、槽形光电传感器,将齿条、认址片分别安装在四级导轨外侧,将四级导轨、电机、槽形光电传感器固定在安装底板上,电机轴安装齿轮,分别与四级导轨外侧齿条啮合,认址片与槽形光电传感器切合,当货叉机构进行远深位工作伸出时,上层电机首先运转,将上层导轨推出,达到限位后,中层电机开始运转,将中层导轨推出,达到限位后,下层电机运转,将下层导轨推出到限位,从而完成远深位伸出操作,收回时运行时序相反,货叉的近深位工作伸出与收回由上层和中层导轨完成,其原理与远深位操作类似。
技术研发人员:刘宇鑫
受保护的技术使用者:沈阳博汇科技有限公司
技术研发日:20221225
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!