一种同料场布置的两台斗轮机之间的防撞保护系统的制作方法
本发明涉及斗轮机,特别是涉及一种同料场布置的两台斗轮机之间的防撞保护系统。
背景技术:
1、斗轮机有堆料和取料两种作业方式,堆料由带式输送机运来的散料经尾车卸至臂架上的带式输送机,从臂架前端抛卸至料场,通过整机的运行,臂架的回转、俯仰可使料堆形成梯形断面的整齐形状。
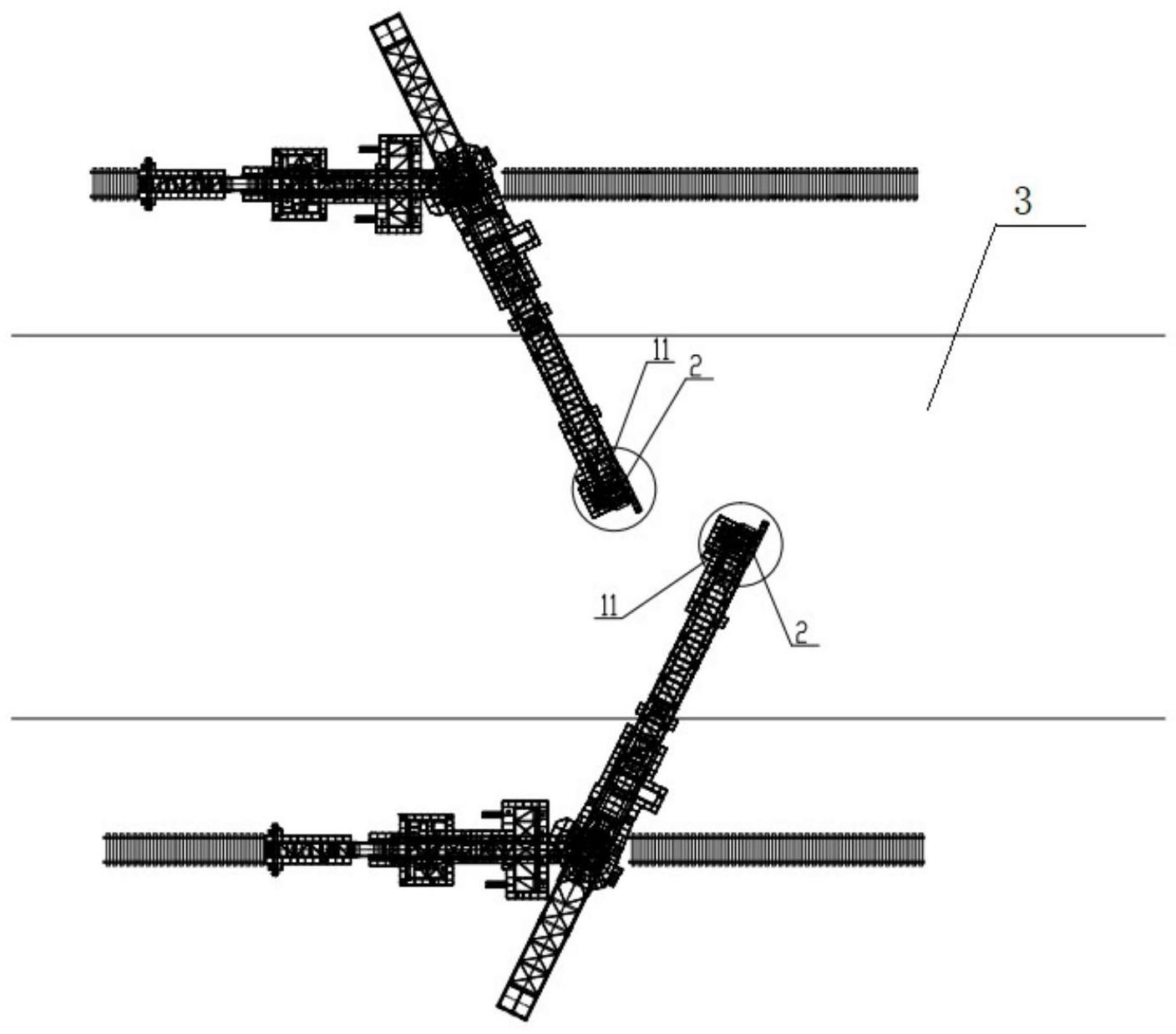
2、如图1所示,斗轮机1包括悬臂11、配重架12、台车13和尾车14。由于受到料场限制,一个料场出现两台斗轮机共轨布置或两台斗轮机并行布置的情况,此时两台斗轮机之间的防撞保护尤为重要。两台斗轮机共轨布置时,由于后车悬臂可能与前车配重架发生碰撞,后车台车可能与尾车发生碰撞,通常的防撞方式采用激光测距防撞,此种防撞需要在两台车设置激光测距仪和反射板,对轨道平直度要求很高,而且受环境影响很大、粉尘、雨水、大雾都会产生误报警,而且考虑到后车悬臂可能与前车配重架发生碰撞,因此防撞距离一般设置范围很大,影响两台设备的作业区域。而对于两台斗轮机通作业于一个料场并行布置的防撞,主要是两台设备悬臂之间的防撞,通常采用超声波防撞,但是并行布置的两台斗轮机悬臂防撞一般发生在前端,但是碰撞方向可能来自于任何方向,所以需要在悬臂前端安装大量的超声波防撞,安装数量的增加就增加了防撞的故障率、维护量以及误报警的概率,而且安装位置和现场布线也存在一定困难。
技术实现思路
1、有鉴于此,本发明提供一种同料场布置的两台斗轮机之间的防撞保护系统,主要目的在于解决激光测距单一的直线测距和对安装条件要求高的弊端,以及解决超声波防撞安装数量大,检测范围有限的问题。
2、为达到上述目的,本发明主要提供如下技术方案:
3、本发明的实施例提供一种同料场布置的两台斗轮机之间的防撞保护系统。其包括:
4、若干个无线测距基站,其分别安装在同料场布置的两台斗轮机的防撞区域,用于实时检测两台斗轮机防撞区域之间的相对距离;
5、plc控制装置,其分别与若干个无线测距基站进行数据通讯连接,用于实时读取无线测距基站实时检测的两台斗轮机防撞区域之间的相对距离并将读取的相对距离与设置好的防撞距离进行对比分析确定两台斗轮机的防撞区域是否会发生碰撞并发出防撞报警或正常动作的提示。
6、如前所述的,当两台斗轮机并行布置时,需要设置两个所述无线测距基站,两个无线测距基站分别安装在两台斗轮机悬臂架前端,当两个无线测距基站检测的两台斗轮机悬臂架前端之间的相对距离小于等于plc控制装置设置好的两台斗轮机的悬臂左右回转防撞距离时,plc控制装置发出禁止向左回转或禁止向右回转的防撞报警。
7、如前所述的,当两台斗轮机共轨串行布置时,需要设置四个所述无线测距基站,第一个无线测距基站安装在后侧斗轮机的悬臂头部,第二个无线测距基站安装在后侧斗轮机的台车处,第三个无线测距基站安装在前侧斗轮机的配重架处,第四个无线测距基站安装在前侧斗轮机的尾车处;
8、当第一个无线测距基站和第三个无线测距基站检测到后侧斗轮机的悬臂头部与前侧斗轮机的配重架之间的相对距离小于等于plc控制装置设置好的后侧斗轮机的悬臂头部与前侧斗轮机的配重架的防撞距离时,plc控制装置分别发出两台斗轮机禁止回转、后侧斗轮机禁止前进和前侧斗轮机禁止后退的防撞报警;
9、当第二个无线测距基站和第四个无线测距基站检测到后侧斗轮机的台车与前侧斗轮机的尾车之间的相对距离小于等于plc控制装置设置好的后侧斗轮机的台车与前侧斗轮机的尾车防撞距离时,plc控制装置分别发出后侧斗轮机禁止前进和前侧斗轮机禁止后退的防撞报警。
10、如前所述的,所述plc控制装置分别通过安装在若干个所述无线测距基站上的485数据通讯接口与若干个所述无线测距基站进行数据通讯连接。
11、借由上述技术方案,本发明的同料场布置的两台斗轮机之间的防撞保护系统至少具有下列优点:
12、本发明的同料场布置的两台斗轮机之间的防撞保护系统通过在两台斗轮机防撞区域安装无线测距基站,利用无线测距原理在空间范围内各个方向实时检测两台斗轮机防撞区域之间的相对距离来防止两台斗轮机碰撞,使两台移动斗轮机之间的防撞可以做到更安全、更精确、更简便、更可靠。
13、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种同料场布置的两台斗轮机之间的防撞保护系统,其特征在于:其包括:
2.根据权利要求1所述的同料场布置的两台斗轮机之间的防撞保护系统,其特征在于,
3.根据权利要求1所述的同料场布置的两台斗轮机之间的防撞保护系统,其特征在于,
4.根据权利要求1所述的同料场布置的两台斗轮机之间的防撞保护系统,其特征在于,
技术总结
本发明公开了一种同料场布置的两台斗轮机之间的防撞保护系统,涉及斗轮机技术领域,达到的目的是解决激光测距单一的直线测距和对安装条件要求高的弊端,以及解决超声波防撞安装数量大,检测范围有限的问题。主要采用的技术方案为:若干个无线测距基站,其分别安装在同料场布置的两台斗轮机的防撞区域,用于实时检测两台斗轮机防撞区域之间的相对距离;PLC控制装置,其分别与若干个无线测距基站进行数据通讯连接,用于实时读取无线测距基站实时检测的两台斗轮机防撞区域之间的相对距离并将读取的相对距离与设置好的防撞距离进行对比分析确定两台斗轮机的防撞区域是否会发生碰撞并发出防撞报警或正常动作的提示。
技术研发人员:金烜弘,张立建,杨柳,于群,王佳文,刘丛,贾延逊,徐万鑫,赵德禹,樊天奇,王泽
受保护的技术使用者:中国电建集团长春发电设备有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!