一种自动收放运送设备以及垃圾桶自动收放运送系统的制作方法
本发明涉及搬运设备,尤其涉及一种自动收放运送设备以及垃圾桶自动收放运送系统。
背景技术:
1、相关技术中,在需要将目标物体由第一个位置转运至第二个位置时,一般通过人工将目标物体搬动至货架上,再拖拽货架移动至第二个位置,以实现目标物体的运送。在医院、酒店等场地进行垃圾回收时,一般是通过人工将垃圾桶搬抬至货架上,通过拖拽货架,将垃圾桶转送至指定区域,进行垃圾回收,以实现垃圾桶的运送。
2、但是,垃圾桶或其他目标物体的运送,需要人工进行搬抬,并且需要人工进行拖拽,当货架高度较高时人工搬抬目标物体费劲,因此,相关技术中的垃圾桶或其他物体的运送方式存在劳动强度大、效率低的问题。
技术实现思路
1、本发明实施例的目的在于:提供一种自动收放运送装置以及垃圾桶自动收放运送系统,可自动抓取、运送、放下垃圾桶,实现自动化运送,降低劳动强度。
2、为达上述目的,本发明采用以下技术方案:
3、一种自动收放运送设备,包括:
4、底板,顶部形成放置区,所述放置区提供垃圾桶放置位置;
5、移动装置,与所述底板连接;
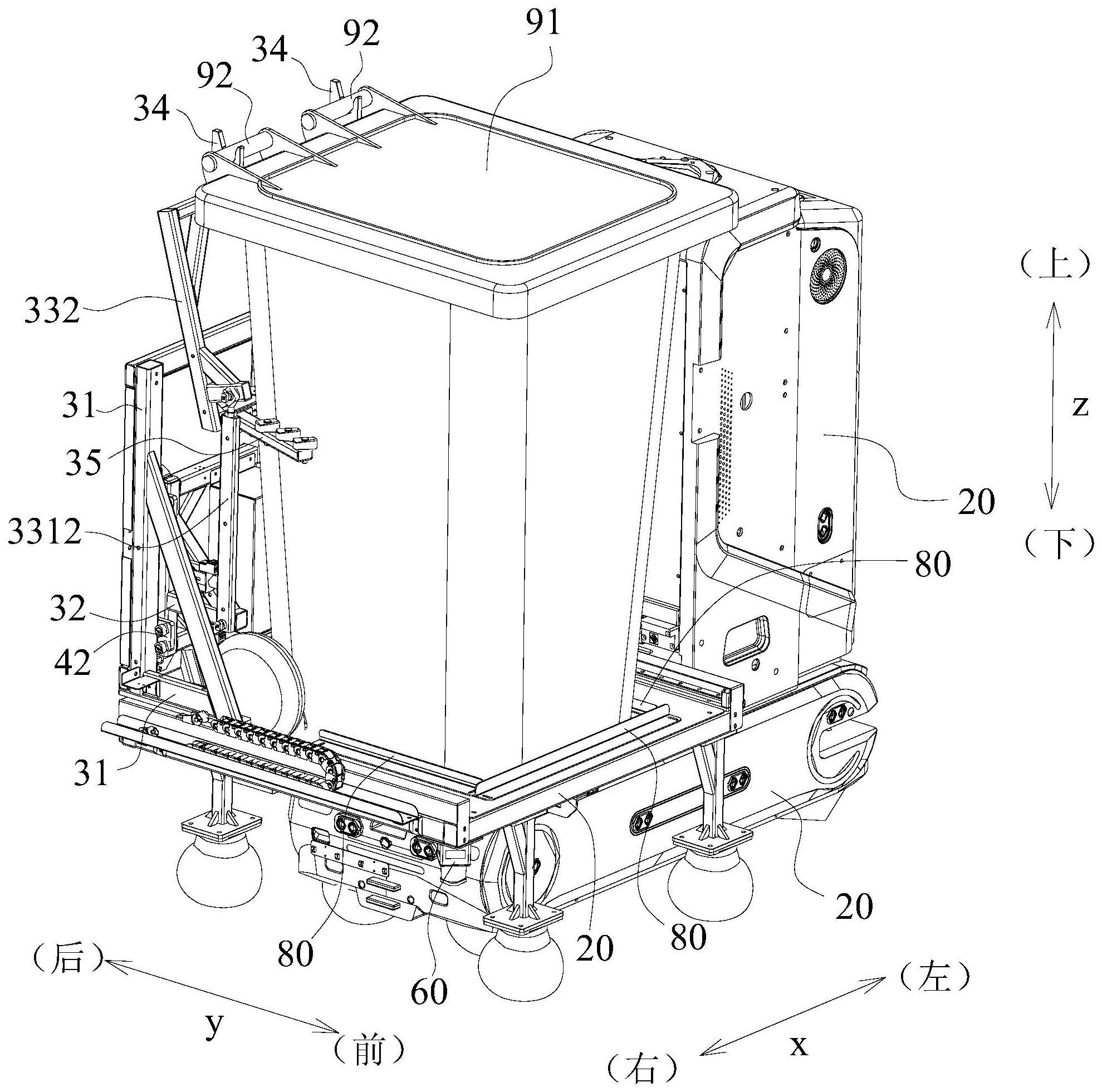
6、收放装置,包括横移架、升降架、翻转架以及抓取结构;所述横移架滑动安装于所述底板,所述升降架滑动安装于所述横移架;所述翻转架包括主架体以及多个抬升臂,所述抬升臂设于所述升降架与所述主架体之间,所述抬升臂的一端与所述升降架铰接,另一端与所述主架体铰接;所述抓取结构设于所述主架体,所述抓取结构用于抓取目标物体;
7、驱动组件,包括第一驱动装置、第二驱动装置以及第三驱动装置;所述第一驱动装置用于驱动所述横移架沿y轴方向移动;所述第二驱动装置用于驱动所述升降架沿z轴方向移动;所述第三驱动装置用于驱动所述抬升臂相对所述升降架翻转,以使所述抓取结构向接近或远离所述底板的方向移动。
8、作为优选,所述移动装置为agv小车,所述agv小车设于所述底板的下方并与所述底板连接;所述agv小车用于带动所述收放装置移动。
9、作为优选,所述收放装置包括两个间隔设置的导向件,所述导向件的一端与主架体连接,另一端为自由端;两个所述导向件之间形成夹持空间;
10、所述导向件由接近所述主架体的一端至远离所述主架体的一端向远离所述夹持空间的方向倾斜;所述导向件用于将目标物体导向所述主架体。
11、作为优选,所述导向件包括导向杆以及多个导向轮;所述导向杆一端与所述主架体连接,另一端为自由端;所述导向轮转动安装于所述导向杆,多个所述导向轮沿所述导向杆的长度方向间隔布置。
12、作为优选,包括一个或多个行程开关;所述行程开关安装于所述主架体,所述行程开关设于所述两个所述导向件之间。
13、作为优选,多个所述抬升臂中包括至少两个上抬升臂,以及至少两个下抬升臂;所述翻转架包括设于相邻两个所述上抬升臂之间的连接臂,所述连接臂的两端分别与两侧的所述上抬升臂连接;
14、所述第三驱动装置为直线驱动机构,所述第三驱动装置包括第三驱动主体以及与所述第三驱动主体连接的第三驱动部,所述第三驱动主体与所述升降架铰接,所述第三驱动部与所述连接臂铰接;所述第三驱动部用于推动以及拉动所述连接臂,以使所述上抬升臂相对所述升降架转动。
15、作为优选,多个所述抬升臂中包括至少两个上抬升臂,以及至少两个下抬升臂;
16、所述翻转架具有放平位置以及抬起位置;所述翻转架位于所述放平位置时,所述上抬升臂以及所述下抬升臂均平行于所述底板;所述翻转架位于所述抬起位置时,所述上抬升臂以及所述下抬升臂均垂直于所述底板。
17、作为优选,所述升降架包括升降顶杆、升降侧杆以及升降横杆,所述升降侧杆与所述升降顶杆连接,所述升降横杆与所述升降侧杆连接;所述升降侧杆设于所述升降顶杆接近所述底板的一侧,所述升降横杆设于所述升降侧杆的前侧;
18、所述主架体包括框体结构以及框体横杆;所述框体结构包括上框体、侧框体以及下框体;所述侧框体的一端与所述上框体连接,另一端与所述下框体连接;所述框体横杆设于所述框体结构的前侧;所述框体横杆与所述侧框体连接,或,所述框体横杆与所述下框体连接;
19、所述上抬升臂通过第一转轴与所述升降顶杆铰接,所述上抬升臂通过第二转轴与所述上框体铰接;所述下抬升臂通过第三转轴与所述升降横杆铰接,所述下抬升臂通过第四转轴与所述框体横杆铰接;
20、所述抓取结构设于所述上框体,所述导向件设于侧框体或所述下框体,所述行程开关设于所述下框体;所述翻转架位于所述放平位置时,所述第三转轴位于所述第一转轴的前侧,所述第四转轴位于所述第二转轴的前侧,所述框体结构相对所述底板倾斜,所述下框体位于所述上框体的前侧,所述抓取结构位于所述导向件的后侧。
21、作为优选,包括限位板,所述限位板与所述底板连接;所述限位板相对所述底板凸出,所述限位板围成所述放置区,所述限位板用于限制垃圾桶的移动。
22、一种垃圾桶自动收放运送系统,包括垃圾桶以及如上技术方案所述的自动收放运送设备;所述垃圾桶包括抓取配合部,所述抓取结构通过抓取或脱离所述抓取配合部,以抓取或放下所述垃圾桶作为优选,。
23、作为优选,所述自动收放运送设备包括激光雷达,所述激光雷达安装于所述底板或所述横移架,所述激光雷达用于探测所述垃圾桶的位置;所述垃圾桶的左侧面、右侧面、后侧面中的其中一侧或多侧设置反光装置,所述反光装置用于反射所述激光雷达发出的激光束。
24、作为优选,所述抓取结构为抓取勾,所述抓取勾的顶部设置凹槽;所述垃圾桶包括桶体,所述抓取配合部为与所述桶体连接的把手,所述把手相对所述桶体的后侧面凸出;所述把手卡入所述把手的凹槽时,所述抓取勾通过所述把手抓取所述垃圾桶。
25、本发明的有益效果为:该自动收放运送设备,可以实现垃圾桶的自动抓取、运送以及放下,可以实现垃圾桶运送的完全无人化,降低劳动强度,垃圾桶可以直接放置在底板上,该设备结构简单,成本低;该自动收放运送设备在工作时从前侧抓取垃圾桶,对工作环境宽度要求小,利于在狭小过道中工作;该自动收放运送设备在医院、酒店等场地使用,有利于降低垃圾回收工作人员感染细菌、病毒的风险。
26、该垃圾桶自动收放运送系统,通过自动收放运送设备与垃圾桶的配合,可以实现自动抓取、运送以及放下垃圾桶,提高垃圾回收效率。
技术特征:
1.一种自动收放运送设备,其特征在于,包括:
2.根据权利要求1所述的自动收放运送设备,其特征在于,所述移动装置(20)为agv小车,所述agv小车设于所述底板(10)的下方并与所述底板(10)连接;所述agv小车用于带动所述收放装置(30)移动。
3.根据权利要求1所述的自动收放运送设备,其特征在于,所述收放装置(30)包括两个间隔设置的导向件(35),所述导向件(35)的一端与主架体(332)连接,另一端为自由端;两个所述导向件(35)之间形成夹持空间(301);
4.根据权利要求3所述的自动收放运送设备,其特征在于,所述导向件(35)包括导向杆(351)以及多个导向轮(352);所述导向杆(351)一端与所述主架体(332)连接,另一端为自由端;所述导向轮(352)转动安装于所述导向杆(351),多个所述导向轮(352)沿所述导向杆(351)的长度方向间隔布置。
5.根据权利要求3所述的自动收放运送设备,其特征在于,包括一个或多个行程开关(36);所述行程开关(36)安装于所述主架体(332),所述行程开关(36)设于所述两个所述导向件(35)之间。
6.根据权利要求1-5任一项所述的自动收放运送设备,其特征在于,多个所述抬升臂(331)中包括至少两个上抬升臂(3311),以及至少两个下抬升臂(3312);所述翻转架(33)包括设于相邻两个所述上抬升臂(3311)之间的连接臂(3313),所述连接臂(3313)的两端分别与两侧的所述上抬升臂(3311)连接;
7.根据权利要求1-5任一项所述的自动收放运送设备,其特征在于,多个所述抬升臂(331)中包括至少两个上抬升臂(3311),以及至少两个下抬升臂(3312);
8.根据权利要求7所述的自动收放运送设备,其特征在于,所述升降架(32)包括升降顶杆(321)、升降侧杆(322)以及升降横杆(323),所述升降侧杆(322)与所述升降顶杆(321)连接,所述升降横杆(323)与所述升降侧杆(322)连接;所述升降侧杆(322)设于所述升降顶杆(321)接近所述底板(10)的一侧,所述升降横杆(323)设于所述升降侧杆(322)的前侧;
9.根据权利要求1-5任一项所述的自动收放运送设备,其特征在于,包括限位板(80),所述限位板(80)与所述底板(10)连接;所述限位板(80)相对所述底板(10)凸出,所述限位板(80)围成所述放置区(101),所述限位板(80)用于限制垃圾桶(90)的移动。
10.一种垃圾桶自动收放运送系统,其特征在于,包括垃圾桶(90)以及如权利要求1-9任一项所述的自动收放运送设备;所述垃圾桶(90)包括抓取配合部,所述抓取结构(34)通过抓取或脱离所述抓取配合部,以抓取或放下所述垃圾桶(90)。
11.根据权利要求10所述的垃圾桶自动收放运送系统,其特征在于,所述自动收放运送设备包括激光雷达(60),所述激光雷达(60)安装于所述底板(10)或所述横移架(31),所述激光雷达(60)用于探测所述垃圾桶(90)的位置;所述垃圾桶(90)的左侧面、右侧面、后侧面中的其中一侧或多侧设置反光装置,所述反光装置用于反射所述激光雷达(60)发出的激光束。
12.根据权利要求10所述的垃圾桶自动收放运送系统,其特征在于,所述抓取结构(34)为抓取勾,所述抓取勾的顶部设置凹槽(341);所述垃圾桶(90)包括桶体(91),所述抓取配合部为与所述桶体(91)连接的把手(92),所述把手(92)相对所述桶体(91)的后侧面凸出;所述把手(92)卡入所述把手(92)的凹槽(341)时,所述抓取勾通过所述把手(92)抓取所述垃圾桶(90)。
技术总结
本发明公开一种自动收放运送设备以及垃圾桶自动收放运送系统,属于搬运设备技术领域。该自动收放运送设备包括底板、移动装置、收放装置、第一驱动装置、第二驱动装置以及第三驱动装置,收放装置安装于底板的上方,收放装置包括横移架、升降架、翻转架以及抓取结构,收放装置用于将垃圾桶由地面抓取至底板或由底板放下至地面,移动装置与底板连接,移动装置用于驱动整个设备行驶移动。该垃圾桶自动收放运送系统包括自动收放运送设备以及垃圾桶,垃圾桶包括抓取配合部。本发明可自动抓取、运送、放下垃圾桶,实现垃圾桶的自动化运送,无需人工搬抬垃圾桶,降低劳动强度,降低垃圾回收工作人员因接触垃圾桶感染细菌病毒的风险。
技术研发人员:赖志林,李良源,罗嘉伟,周江涛
受保护的技术使用者:广州赛特智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!