白车身的传输系统、间隙面差在线测量系统及其控制方法与流程
本发明涉及车辆,具体提供一种白车身的传输系统、间隙面差在线测量系统及其控制方法。
背景技术:
1、目前,针对白车身的间隙和面差的测量大都停留在人工测量阶段,人员操作效率低,测量误差较大,人工测量对间隙和面差的测量结果出具慢,之后进行数据的分析和整理也需要的时间长,车身的间隙和面差与总装的间隙和面差的对应性差,导致后续对间隙和面差的调整量大,且调整占用的工时较长,从而不利于对白车身的质量控制。
2、随着自动测量技术的发展,虽然也有部分企业使用了在线自动测量技术,但是,由于调整线上的普通的随动输送系统的滚床传输速度慢,传输占用的工时长,因此,无法高效完成高节拍生产线下的测量问题。
3、相应地,本领域需要一种新的白车身的传输系统来解决现有的运输白车身的滚床系统传输速度慢且无法满足高节拍生产线的间隙面差在线测量问题。
技术实现思路
1、本发明旨在解决上述技术问题,即,解决现有的运输白车身的滚床系统传输速度慢且无法满足高节拍生产线的间隙面差在线测量问题。
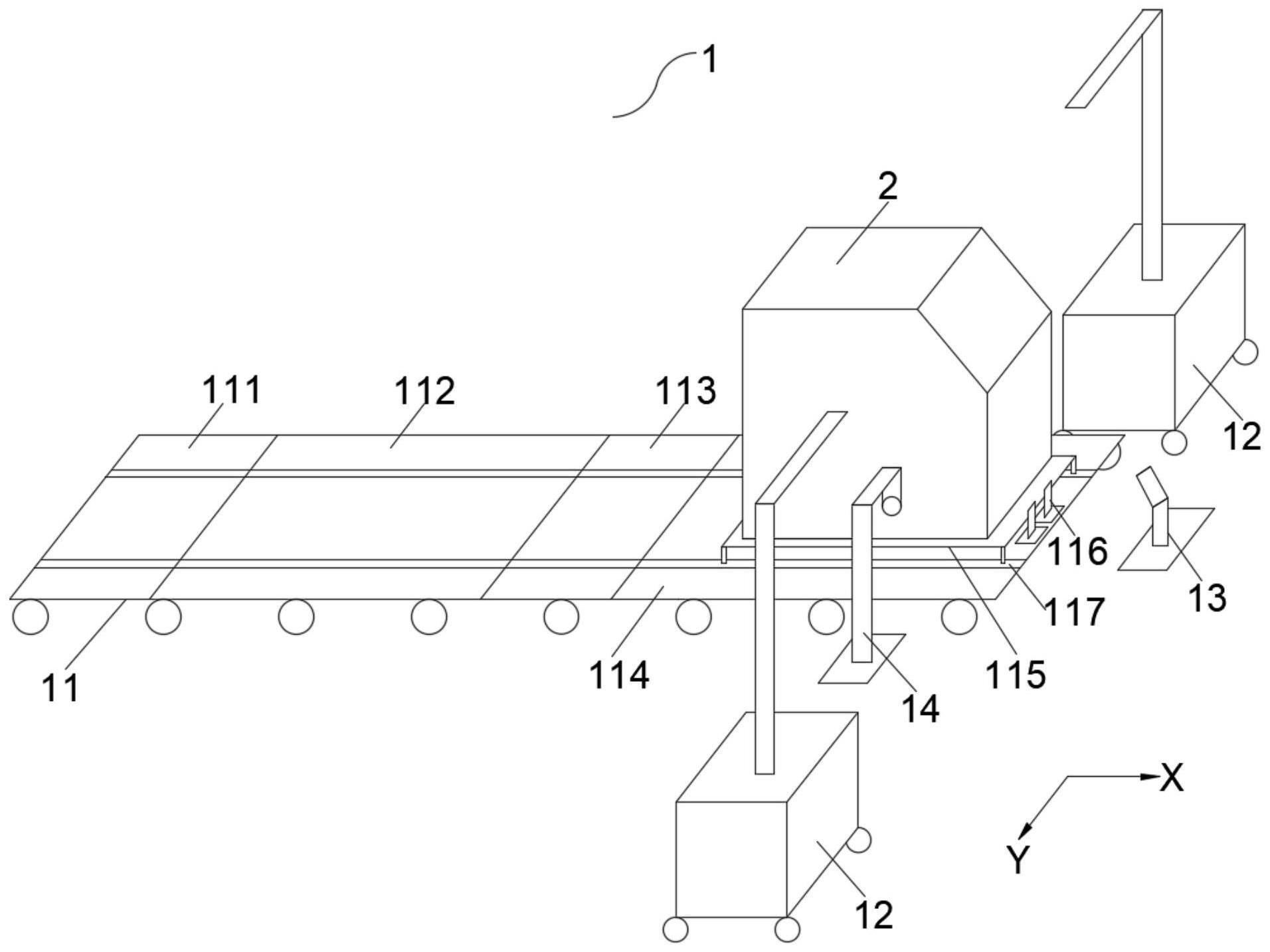
2、在第一方面,本发明提供一种白车身的传输系统,所述传输系统包括依次相连的第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,所述第一控制工位用于运输所述白车身至所述中间传输工位,并且设置成能够调节运输速度,所述中间传输工位用于匀速运输所述白车身至所述第二控制工位,所述第二控制工位用于运输所述白车身至间隙面差在线测量工位,并且设置成能够调节运输速度,所述间隙面差在线测量工位用于对进行间隙面差在线测量工作时的所述白车身进行限位,并将间隙面差在线测量工作结束后的所述白车身以速度可调的方式传输至下一系统。
3、在上述的白车身的传输系统的优选技术方案中,所述间隙面差在线测量工位包括限位装置和传送装置,所述传送装置能够调节传送时的运行速度,所述限位装置包括x向限位装置和y向限位装置,所述x向限位装置用于限定所述白车身在运行方向的位置,所述y向限位装置用于限定所述白车身在所述运行方向的左右两侧的位置。
4、在上述的白车身的传输系统的优选技术方案中,所述传输系统还包括雪橇,所述雪橇用于承载所述白车身,所述雪橇承载所述白车身经过所述第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,所述雪橇到达所述间隙面差在线测量工位后,所述x向限位装置限制所述雪橇的运行方向的位置,所述y向限位装置限制所述雪橇的所述运行方向的左右两侧的位置。
5、本发明还提供一种白车身的间隙面差在线测量系统,所述间隙面差在线测量系统包括上述优选技术方案中任一项所述的白车身的传输系统,所述间隙面差在线测量系统还包括间隙面差在线测量装置。
6、在上述的白车身的间隙面差在线测量系统的优选技术方案中,所述间隙面差在线测量装置包括在线检测机器人和到位检测装置,所述在线检测机器人用于检测所述白车身上的测点,所述到位检测装置用于检测所述白车身是否到达待测位置。
7、另外,本发明还提供一种白车身的间隙面差在线测量系统的控制方法,所述间隙面差在线测量系统包括传输系统,所述传输系统包括依次相连的第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,所述控制方法包括:控制所述白车身以第一速度运行到所述第一控制工位上;控制所述第一控制工位带动所述白车身以所述第一速度降至第二速度并以第二速度将所述白车身传输至所述中间传输工位上;控制中间传输工位带动所述白车身以第二速度匀速运动并以所述第二速度将所述白车身传输至所述第二控制工位上;控制所述第二控制工位带动所述白车身以所述第二速度加速至第三速度并以所述第三速度将所述白车身传输至所述间隙面差在线测量工位上;控制所述间隙面差在线测量工位带动所述白车身以所述第三速度运动到所述间隙面差在线测量工位的设定位置后停止运动,停止t时间后,控制所述间隙面差在线测量工位带动所述白车身加速至第四速度并以第四速度将所述白车身传出间隙面差在线测量工位。
8、在上述的白车身的间隙面差在线测量系统的控制方法的优选技术方案中,所述间隙面差在线测量系统还包括间隙面差在线测量装置,所述间隙面差在线测量装置包括在线检测机器人和到位检测装置,所述到位检测装置与所述在线检测机器人通讯连接,“控制所述间隙面差在线测量工位带动所述白车身以所述第三速度运动到所述间隙面差在线测量工位的设定位置后停止运动,停止t时间后,控制所述间隙面差在线测量工位带动所述白车身加速至第四速度并以第四速度将所述白车身传出”的步骤进一步包括:控制所述间隙面差在线测量工位带动所述白车身以所述第三速度运动到所述间隙面差在线测量工位的设定位置后停止运动,控制所述到位检测装置检测所述白车身是否到达待测位置;当所述到位检测装置检测到所述白车身到达待测位置时,控制所述在线检测机器人运动并对所述白车身上的测点进行检测;停止t时间后,控制所述间隙面差在线测量工位带动所述白车身加速至第四速度并以第四速度将所述白车身传出。
9、在上述的白车身的间隙面差在线测量系统的控制方法的优选技术方案中,“控制所述在线检测机器人运动并对所述白车身上的测点进行检测”的步骤进一步包括:控制所述在线检测机器人根据所述白车身上的测点位置判断车型;控制所述在线检测机器人根据车型选择对应的测量程序并对所述测点进行测量。
10、在上述的白车身的间隙面差在线测量系统的控制方法的优选技术方案中,所述控制方法还包括:在所述在线检测机器人对所述白车身上的测点检测完成后,控制所述在线检测机器人回到初始位置;控制所述在线检测机器人对检测到的数据进行计算分析,并将计算分析结果同步到下一工位。
11、在上述的白车身的间隙面差在线测量系统的控制方法的优选技术方案中,所述间隙面差在线测量系统还包括车门吸平装置,“当所述到位检测装置检测到所述白车身到达待测位置时,控制所述在线检测机器人运动并对所述白车身上的测点进行检测”的步骤进一步包括:当所述到位检测装置检测到所述白车身到达待测位置时,控制所述车门吸平装置将所述白车身的车门与侧围吸平对齐;控制所述在线检测机器人运动并对所述白车身上的测点进行检测。
12、在采用上述技术方案的情况下,本发明将第一控制工位、中间传输系统、第二控制工位和间隙面差在线测量工位集成为传输系统,控制白车身快速进入到第一控制工位并且快速从第二控制工位传出到间隙面差在线测量工位从而节约出一部分时间,并且通过控制白车身快速传出间隙面差在线测量工位也能节约出一部分时间,将节约出的时间用于对白车身进行间隙面差在线测量,从而提高了测量结果的准确性。
技术特征:
1.一种白车身的传输系统,其特征在于,所述传输系统包括依次相连的第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,所述第一控制工位用于运输所述白车身至所述中间传输工位,并且设置成能够调节运输速度,所述中间传输工位用于匀速运输所述白车身至所述第二控制工位,所述第二控制工位用于运输所述白车身至间隙面差在线测量工位,并且设置成能够调节运输速度,所述间隙面差在线测量工位用于对进行在线测量工作时的所述白车身进行限位,并将在线测量工作结束后的所述白车身以速度可调的方式传输至下一系统。
2.根据权利要求1所述的白车身的传输系统,其特征在于,所述间隙面差在线测量工位包括限位装置和传送装置,所述传送装置能够调节传送时的运行速度,所述限位装置包括x向限位装置和y向限位装置,所述x向限位装置用于限定所述白车身在运行方向的位置,所述y向限位装置用于限定所述白车身在所述运行方向的左右两侧的位置。
3.根据权利要求2所述的白车身的传输系统,其特征在于,所述传输系统还包括雪橇,所述雪橇用于承载所述白车身,所述雪橇承载所述白车身经过所述第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,所述雪橇到达所述间隙面差在线测量工位后,所述x向限位装置限制所述雪橇的运行方向的位置,所述y向限位装置限制所述雪橇的所述运行方向的左右两侧的位置。
4.一种白车身的间隙面差在线测量系统,其特征在于,所述间隙面差在线测量系统包括上述权利要求1-3中任一项所述的白车身的传输系统,所述间隙面差在线测量系统还包括间隙面差在线测量装置。
5.根据权利要求4所述的白车身的间隙面差在线测量系统,其特征在于,所述间隙面差在线测量装置包括在线检测机器人和到位检测装置,所述在线检测机器人用于检测所述白车身上的测点,所述到位检测装置用于检测所述白车身是否到达待测位置。
6.一种白车身的间隙面差在线测量系统的控制方法,其特征在于,所述间隙面差在线测量系统包括传输系统,所述传输系统包括依次相连的第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,所述控制方法包括:
7.根据权利要求6所述的白车身的间隙面差在线测量系统的控制方法,其特征在于,所述间隙面差在线测量系统还包括间隙面差在线测量装置,所述间隙面差在线测量装置包括在线检测机器人和到位检测装置,所述到位检测装置与所述在线检测机器人通讯连接,“控制所述间隙面差在线测量工位带动所述白车身以所述第三速度运动到所述间隙面差在线测量工位的设定位置后停止运动,停止t时间后,控制所述间隙面差在线测量工位带动所述白车身加速至第四速度并以第四速度将所述白车身传出”的步骤进一步包括:
8.根据权利要求7所述的白车身的间隙面差在线测量系统的控制方法,其特征在于,“控制所述在线检测机器人运动并对所述白车身上的测点进行检测”的步骤进一步包括:
9.根据权利要求8所述的白车身的间隙面差在线测量系统的控制方法,其特征在于,所述控制方法还包括:
10.根据权利要求7所述的白车身的间隙面差在线测量系统的控制方法,其特征在于,所述间隙面差在线测量系统还包括车门吸平装置,“当所述到位检测装置检测到所述白车身到达待测位置时,控制所述在线检测机器人运动并对所述白车身上的测点进行检测”的步骤进一步包括:
技术总结
本发明涉及车辆技术领域,具体提供一种白车身的传输系统、间隙面差在线测量系统及其控制方法,旨在解决现有的运输白车身的滚床系统传输速度慢且无法满足高节拍生产线的间隙面差在线测量问题。为此目的,本发明的白车身的传输系统包括依次相连的第一控制工位、中间传输工位、第二控制工位和间隙面差在线测量工位,第一控制工位用于运输白车身至中间传输工位,中间传输工位用于匀速运输白车身至第二控制工位,第二控制工位用于运输白车身至间隙面差在线测量工位,第一控制工位和第二控制工位均能够调节运输速度,间隙面差在线测量工位将测量工作结束后的白车身以速度可调的方式传输至下一系统。通过调整传输速度能延长间隙面差在线测量时间。
技术研发人员:高善民,朱佳南,朱富强
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!