全自动立杆模块化作业车的制作方法
本申请涉及配电网,特别是涉及一种全自动立杆模块化作业车。
背景技术:
1、随着配电网市场的需求的提高,不同的工程车也在逐步改进。比如,吊装式工程车是在随车吊的基础上进行改进,增加了挖掘臂和钻孔等功能;装载式的工程车是在原有装载机的基础上增加了挖掘臂、吊装臂以及钻孔等功能;挖掘式工程车是在挖掘的基础上安装了钻机或者抓杆器等。以上工程车在一定程度上满足了工程作业的多元化需求,但是仍然存在功能上的缺陷:立杆作业时需要人工配合反复切换工具,作业过程冗余,有效作业时间比例较低。如何提高立杆作业车的作业效率,是一个亟待解决的问题。
技术实现思路
1、基于此,有必要针对上述问题,提供一种可提高作业效率的全自动立杆模块化作业车。
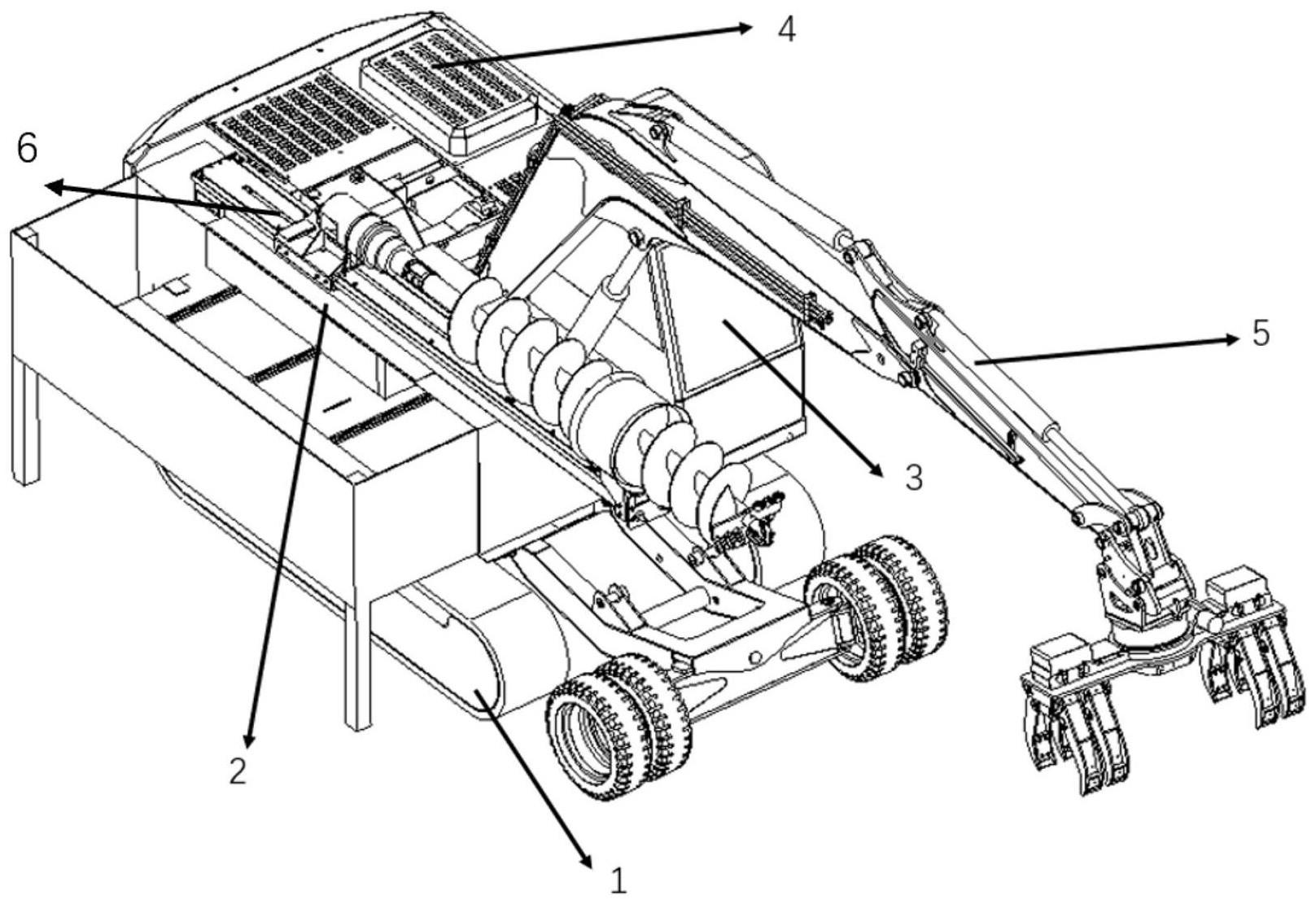
2、一种全自动立杆模块化作业车,包括走行部模块、控制模块、多功能模块箱和功能模块,所述控制模块、所述多功能模块箱和所述功能模块均通过回转台与所述走行部模块连接,所述功能模块设置有数据采集模块,所述控制模块连接所述数据采集模块、所述走行部模块和所述功能模块;所述控制模块根据所述数据采集模块采集的数据控制所述功能模块依次选取所述多功能模块箱中相应的作业工具进行自动立杆作业。
3、在其中一个实施例中,所述控制模块包括主控室、液压控制系统、智能电控系统和通讯系统,所述主控室设置于所述回转台,所述液压控制系统、所述智能电控系统和所述通讯系统均位于所述主控室内,所述智能电控系统连接所述液压控制系统和所述通讯系统,所述液压控制系统连接所述走行部模块、所述多功能模块箱和所述功能模块;
4、所述智能电控系统根据所述通讯系统接收的施工定位坐标,控制所述液压控制系统驱动所述走行部模块工作行驶至施工位置后,所述智能电控系统控制所述液压控制系统驱动所述功能模块选取所述多功能模块箱中相应的作业工具进行自动立杆作业。
5、在其中一个实施例中,全自动立杆模块化作业车还包括设置于所述主控室的地质雷达,所述智能电控系统还连接所述地质雷达,获取所述地质雷达扫描处理的实时数据进行全车运行路径智能规划和作业范围内环境监测预警;所述地址雷达为地基差分干涉合成孔径雷达。
6、在其中一个实施例中,所述多功能模块箱包括模块箱和作业工具,所述模块箱包括内箱体和外箱体,所述内箱体和所述外箱体设置有滑轨和滚轮,用作箱体伸缩;所述外箱体底部设有伸缩支脚,所述伸缩支脚在所述外箱体伸出时下落对所述外箱体形成支撑;所述作业工具放置于所述外箱体中。
7、在其中一个实施例中,所述走行部模块包括底架、履带部、辅助轮部、连接部和驱动总成,所述底架通过所述回转台与所述控制模块、所述多功能模块箱和所述功能模块连接,所述履带部固定在所述底架的两侧,所述辅助轮部通过所述连接部固定于所述底架的前后端,所述连接部通过液压连杆与所述液压控制系统连接,所述驱动总成固定于所述底架。
8、在其中一个实施例中,所述功能模块包括铰接在所述回转台的主动臂和辅助功能臂,所述主动臂和所述辅助功能臂连接所述液压控制系统,且所述主动臂和所述辅助功能臂的前端均设置有液压快换接头,所述液压快换接头用作与所述多功能模块箱中的作业工具可拆装连接;所述数据采集模块设置于所述液压快换接头。
9、在其中一个实施例中,所述多功能模块箱还用于作业车配重,所述智能电控系统还连接所述多功能模块箱,对所述多功能模块箱进行调节以自适应整机稳定性配重需求。
10、在其中一个实施例中,所述多功能模块箱中的作业工具包括挖斗、钻杆、抓手和振动夯,且各业工具均设置有rfid(radio frequency identification,射频识别)电子标签;所述智能电控系统通过调节所述钻杆进行移动以自适应整机稳定性配重需求。
11、在其中一个实施例中,所述数据采集模块包括连接所述控制模块的rfid电子标签阅读器、位移传感器和土壤密实度传感器。
12、在其中一个实施例中,全自动立杆模块化作业车还包括用于记录施工过程的车载记录仪。
13、上述全自动立杆模块化作业车,控制模块根据数据采集模块采集的数据分控制功能模块依次选取多功能模块箱中相应的作业工具进行自动立杆作业,实现作业过程中作业工具的自动化切换,降低人工操作的安全隐患,减少人工成本,提高了作业车的施工效率。
技术特征:
1.一种全自动立杆模块化作业车,其特征在于,包括走行部模块、控制模块、多功能模块箱和功能模块,所述控制模块、所述多功能模块箱和所述功能模块均通过回转台与所述走行部模块连接,所述功能模块设置有数据采集模块,所述控制模块连接所述数据采集模块、所述走行部模块和所述功能模块;所述控制模块根据所述数据采集模块采集的数据控制所述功能模块依次选取所述多功能模块箱中相应的作业工具进行自动立杆作业。
2.根据权利要求1所述的全自动立杆模块化作业车,其特征在于,所述控制模块包括主控室、液压控制系统、智能电控系统和通讯系统,所述主控室设置于所述回转台,所述液压控制系统、所述智能电控系统和所述通讯系统均位于所述主控室内,所述智能电控系统连接所述液压控制系统和所述通讯系统,所述液压控制系统连接所述走行部模块、所述多功能模块箱和所述功能模块;
3.根据权利要求2所述的全自动立杆模块化作业车,其特征在于,还包括设置于所述主控室的地质雷达,所述智能电控系统还连接所述地质雷达,获取所述地质雷达扫描处理的实时数据进行全车运行路径智能规划和作业范围内环境监测预警;所述地址雷达为地基差分干涉合成孔径雷达。
4.根据权利要求2所述的全自动立杆模块化作业车,其特征在于,所述多功能模块箱包括模块箱和作业工具,所述模块箱包括内箱体和外箱体,所述内箱体和所述外箱体设置有滑轨和滚轮,用作箱体伸缩;所述外箱体底部设有伸缩支脚,所述伸缩支脚在所述外箱体伸出时下落对所述外箱体形成支撑;所述作业工具放置于所述外箱体中。
5.根据权利要求2所述的全自动立杆模块化作业车,其特征在于,所述走行部模块包括底架、履带部、辅助轮部、连接部和驱动总成,所述底架通过所述回转台与所述控制模块、所述多功能模块箱和所述功能模块连接,所述履带部固定在所述底架的两侧,所述辅助轮部通过所述连接部固定于所述底架的前后端,所述连接部通过液压连杆与所述液压控制系统连接,所述驱动总成固定于所述底架。
6.根据权利要求2所述的全自动立杆模块化作业车,其特征在于,所述功能模块包括铰接在所述回转台的主动臂和辅助功能臂,所述主动臂和所述辅助功能臂连接所述液压控制系统,且所述主动臂和所述辅助功能臂的前端均设置有液压快换接头,所述液压快换接头用作与所述多功能模块箱中的作业工具可拆装连接;所述数据采集模块设置于所述液压快换接头。
7.根据权利要求2所述的全自动立杆模块化作业车,其特征在于,所述多功能模块箱还用于作业车配重,所述智能电控系统还连接所述多功能模块箱,对所述多功能模块箱进行调节以自适应整机稳定性配重需求。
8.根据权利要求7所述的全自动立杆模块化作业车,其特征在于,所述多功能模块箱中的作业工具包括挖斗、钻杆、抓手和振动夯,且各业工具均设置有rfid电子标签;所述智能电控系统通过调节所述钻杆进行移动以自适应整机稳定性配重需求。
9.根据权利要求1-8任意一项所述的全自动立杆模块化作业车,其特征在于,所述数据采集模块包括连接所述控制模块的rfid电子标签阅读器、位移传感器和土壤密实度传感器。
10.根据权利要求1-8任意一项所述的全自动立杆模块化作业车,其特征在于,还包括用于记录施工过程的车载记录仪。
技术总结
本申请涉及一种全自动立杆模块化作业车,包括走行部模块、控制模块、多功能模块箱和功能模块,控制模块、多功能模块箱和功能模块均通过回转台与走行部模块连接,功能模块设置有数据采集模块,控制模块连接数据采集模块、走行部模块和功能模块;控制模块根据数据采集模块采集的数据控制功能模块依次选取多功能模块箱中相应的作业工具进行自动立杆作业,实现作业过程中作业工具的自动化切换,降低人工操作的安全隐患,减少人工成本,提高了作业车的施工效率。
技术研发人员:潘建兵,范瑞祥,辛建波,邓志祥,郝钰,余延武,吴栋军,戴宏亮,姚远,林生得,徐在德,郭紫华,安义,余杰,胡柳,周安,彭元庆
受保护的技术使用者:国网江西省电力有限公司电力科学研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!