一种地下管线探测智能牵引系统的制作方法
本发明涉及地下管线测量处理,尤其涉及一种地下管线探测智能牵引系统。
背景技术:
1、用于地下管道三维轨迹惯性定位测量的仪器称为地下管道三维轨迹惯性定位测量仪,简称“管道惯性定位仪”(俗称“地下管道陀螺仪”),一般由三维数据惯性定位采集单元、数据处理单元及数据处理软件组成。通过惯性传感器(陀螺仪、加速度计)在管道中行进,开展惯性定位测量,利用惯性传感器进行导航与制导,依据测量载体的加速度(惯性),推算出载体的瞬时速度、位置和姿态,从而获取管道三维轨迹坐标的测量技术。管道惯性定位仪需配备牵引动力及绳索配合使用。目前一般以卷扬机作为牵引动力通过钢缆牵引管道惯性定位仪在待测管道内进行轨迹测量以获得管道精确三位姿态。
2、卷扬机牵引管道惯性定位仪进行测量过程中,起点和终点卷扬机的收放线操作是独立运行的,操作人员目前一般通过通讯设备进行协同操作两台卷扬机同时运行和停止,由于存在人工通讯不畅延时、人工操作失误等情况,容易出现卷扬机收、放线不及时造成牵引绳受力过大而损坏的问题;当管道惯性定位仪在管道内行径过程中遇到障碍时容易造成卡顿无法前进,卷扬机停止收线不及时也会造成牵引绳受力过大而损坏,更严重者至使管道惯性定位仪滞留在管道内部导致工程测量事故。
3、考虑到现有的卷扬机无法测量牵引绳受力大小、牵引绳放线和收线距离以及牵引速度,而起点和终点卷扬机和操作人员之间很难协调配合一致,为了提高管线探测质量和效率,因此本专利提出一种管道惯性定位仪能够在管道中平稳匀速行径且自动化运行程度高、操作简单的地下管线探测智能牵引系统。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种地下管线探测智能牵引系统,能够提高管线探测质量和效率、减少用工人数,降低操作复杂度,提高自动化运行程度,降低对人工经验依赖,增强测量过程安全性。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种地下管线探测智能牵引系统,所述牵引系统包括两智能牵引设备与远程牵引控制交互终端:
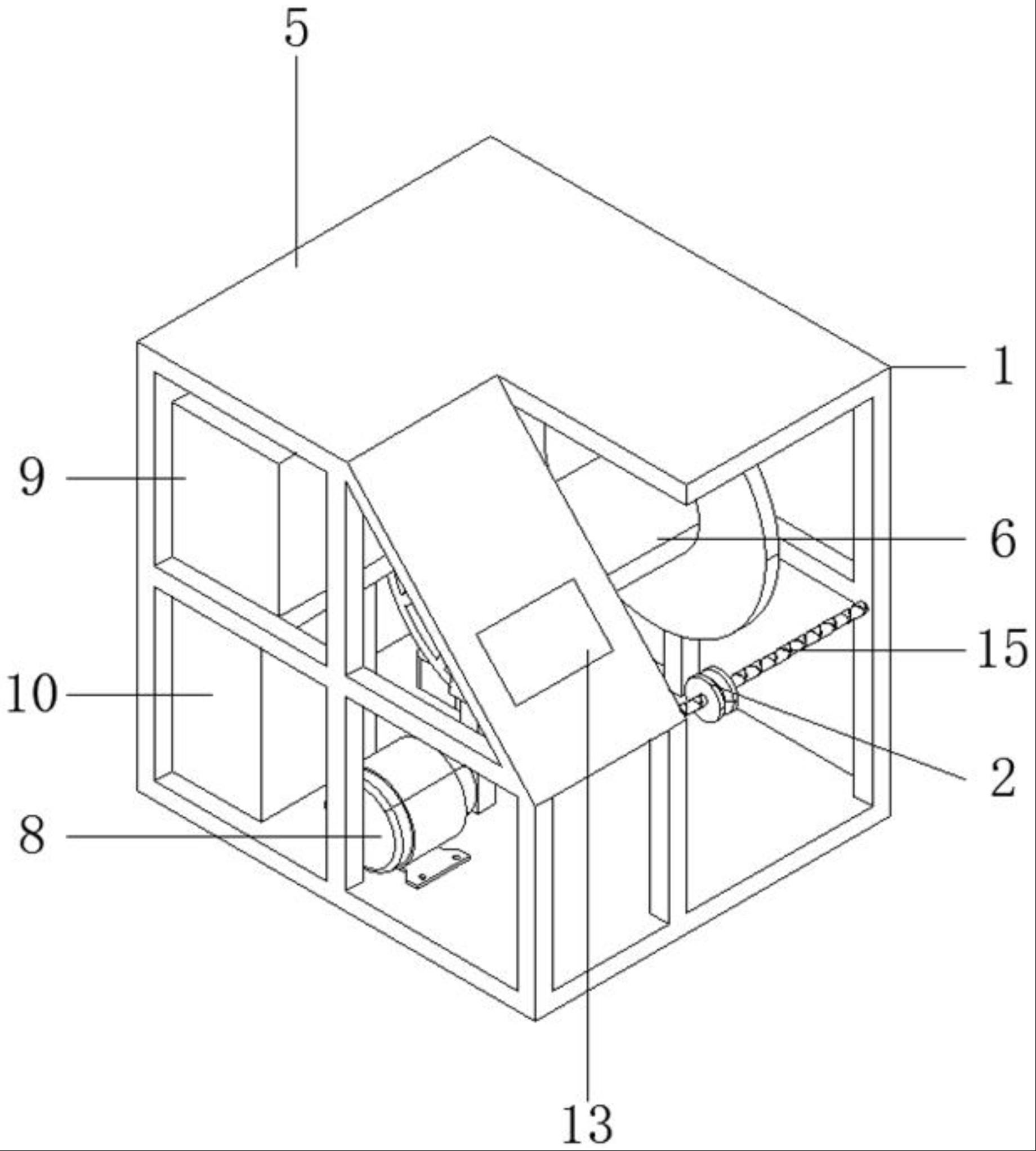
4、两个所述智能牵引设备,分别设于地下管线的两端处,通过牵引绳连接管道惯性定位仪,智能牵引设备包括外框架、外框架上转动连接的绕线盘、绕线盘一侧同轴连接的旋转编码器、驱动绕线盘转动的电机、控制电机运行的电控模块、为整个牵引设备提供电源的可拆卸电池组、测量牵引绳受力大小的应变传感器、测量管道惯性定位仪行经位置的测距编码器、主控交互模块与无线通信模块;
5、所述远程牵引控制交互终端,通过无线通信模块与主控交互模块通信连接,用于获取操作人员下达的指令并根据指令向主控交互模块发送控制指令,实现设备运行远程集中控制;以及用于接收并显示主控交互模块发送的智能牵引设备的各参数,实现设备运行状态信息集中展示;
6、两个所述主控交互模块,用于获取旋转编码器、应变传感器与测距编码器的测量数据并计算得到运行状态和控制命令,以及用于控制电控模块运行;两个所述主控交互模块相互之间通过无线通信模块通信连接,用于两个所述主控交互模块相互之间发送、接收设备的运行状态信息,实现两智能牵引设备协同工作。
7、优选的,所述旋转编码器、应变传感器与测距编码器的输出端均与主控交互模块的输入端电性连接,所述电控模块的输入端与主控交互模块的输出端电性连接,所述电控模块的输出端控制连接电机的输入端。
8、优选的,所述远程牵引控制交互终端包括控制部分、参数显示部分与牵引行经显示部分。
9、优选的,所述控制部分包括紧急停止按钮、加速按钮、减速按钮、前进按钮和后退按钮。
10、优选的,所述参数显示部分,通过显示屏展示系统参数,包括牵引速度、牵引受力、绕线盘转速与电源电量,所述参数显示部分还包括有系统告警指示灯。
11、优选的,所述牵引行经显示部分通过大屏幕展示管道惯性定位仪的当前牵引方向和牵引行径距离位置。
12、优选的,所述外框架上且位于绕线盘的一侧设有轴线与绕线盘轴线平行的往复绕线螺杆。
13、优选的,所述往复绕线螺杆上螺纹安装有一绳轮,所述牵引绳带动绳轮转动使得与往复绕线螺杆螺纹配合的绳轮沿往复螺杆的轴线往复运动。
14、优选的,所述牵引绳从绕线盘上依次绕过绳轮、测距编码器与应变传感器从而连接在管道惯性定位仪上。
15、优选的,所述电机螺纹安装于外框架的底部,所述电机的轴头上以及绕线盘的轴上均设有皮带轮,两所述皮带轮通过皮带传动连接。
16、本发明与现有技术相比,其有益效果为:
17、通过设置应变传感器测量牵引绳的受力大小,设置测距编码器测量管道惯性定位仪的行经位置,设置旋转编码器测量绕线盘的角速度,再通过主控交互模块接收并计算所测数据,结合无线通信模块发送、接收,实现智能牵引设备能够协同运行,管道惯性定位仪能够在地下管线中匀速平稳行经,不会出现牵引绳受力过大导致出现断裂的情况,遇到障碍时能够自动后退一段再保持原方向牵引解决,还能将各测量数据发送至远程牵引控制交互终端进行展示设备的行经位置等运行状态,操作人员通过操作远程牵引控制交互终端控制智能牵引设备的牵引速度、牵引方向等,解决了现有技术中通过通讯设备带来的测量过程复杂、严重依赖人工经验的问题,使得测量过程更加简单方便。
技术特征:
1.一种地下管线探测智能牵引系统,其特征在于:所述牵引系统包括两智能牵引设备与远程牵引控制交互终端:
2.根据权利要求1所述的一种地下管线探测智能牵引系统,其特征在于:所述旋转编码器、应变传感器与测距编码器的输出端均与主控交互模块的输入端电性连接,所述电控模块的输入端与主控交互模块的输出端电性连接,所述电控模块的输出端控制连接电机的输入端。
3.根据权利要求1所述的一种地下管线探测智能牵引系统,其特征在于:所述远程牵引控制交互终端包括控制部分、参数显示部分与牵引行经显示部分。
4.根据权利要求3所述的一种地下管线探测智能牵引系统,其特征在于:所述控制部分包括紧急停止按钮、加速按钮、减速按钮、前进按钮和后退按钮。
5.根据权利要求3所述的一种地下管线探测智能牵引系统,其特征在于:所述参数显示部分,通过显示屏展示系统参数,包括牵引速度、牵引受力、绕线盘转速与电源电量,所述参数显示部分还包括有系统告警指示灯。
6.根据权利要求3所述的一种地下管线探测智能牵引系统,其特征在于:所述牵引行经显示部分通过大屏幕展示管道惯性定位仪的当前牵引方向和牵引行径距离位置。
7.根据权利要求1所述的一种地下管线探测智能牵引系统,其特征在于:所述外框架上且位于绕线盘的一侧设有轴线与绕线盘轴线平行的往复绕线螺杆。
8.根据权利要求7所述的一种地下管线探测智能牵引系统,其特征在于:所述往复绕线螺杆上螺纹安装有一绳轮,所述牵引绳带动绳轮转动使得与往复绕线螺杆螺纹配合的绳轮沿往复螺杆的轴线往复运动。
9.根据权利要求8所述的一种地下管线探测智能牵引系统,其特征在于:所述牵引绳从绕线盘上依次绕过绳轮、测距编码器与应变传感器从而连接在管道惯性定位仪上。
10.根据权利要求1所述的一种地下管线探测智能牵引系统,其特征在于:所述电机螺纹安装于外框架的底部,所述电机的轴头上以及绕线盘的轴上均设有皮带轮,两所述皮带轮通过皮带传动连接。
技术总结
本发明公开了一种地下管线探测智能牵引系统,包括两智能牵引设备与远程牵引控制交互终端:两个智能牵引设备,分别设于地下管线的两端处,通过牵引绳连接管道惯性定位仪,智能牵引设备包括外框架、外框架上转动连接的绕线盘、绕线盘一侧同轴连接的旋转编码器、驱动绕线盘转动的电机、控制电机运行的电控模块、为整个牵引设备提供电源的可拆卸电池组、测量牵引绳受力大小的应变传感器、测量管道惯性定位仪行经位置的测距编码器、主控交互模块与无线通信模块。本发明能够提高管线探测质量和效率、减少用工人数,降低操作复杂度,提高自动化运行程度,降低对人工经验依赖,增强测量过程安全性。
技术研发人员:戴维,陈灿铭,李诗华,李春森
受保护的技术使用者:广州铭子通科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!