一种使用点云斜率控制汽车自动装车的方法与流程
本发明涉及无人装车,具体为一种使用点云斜率控制汽车自动装车的方法。
背景技术:
1、在汽车散料自动装车领域,存在着几个难以解决的难题:
2、装料时物料高度监测设备,如超声波雷达、激光雷达等易受抑尘、物料流扰动所影响,即安装在出料口附近的监测设备很难稳定获取准确的实时料位信息;而如果将设备远离出料口,实时获得的数据往往与出料口高度相差很大,从而使数据变得没有意义。汽车车厢内部经常安装一些用于固定车厢两侧挡板的拉筋或拉绳,这些装置时常会影响到监测设备的料位判定,通过常规手段很难做到完全屏蔽。
3、另外,汽车自动装车系统往往无法掌握车辆的精准位置信息,无论是车辆的偏斜度还是前进距离都由司机所控制,这就导致常规控制手段难以预测车辆装车的准确信息。一旦车辆出现偏斜或前进距离不足时,单纯靠出料口附近的单一监测设备很难做出及时有效的调整,这就容易造成意外情况的发生,而如果添加更多的监控设备,又会使得生产成本提高,同时增加系统的复杂性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种使用点云斜率控制汽车自动装车的方法,有助于解决汽车自动装车系统无法精确掌握车辆位置信息以及装料时物料监测设备易受影响的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现,一种使用点云斜率控制汽车自动装车的方法,包括以下步骤:
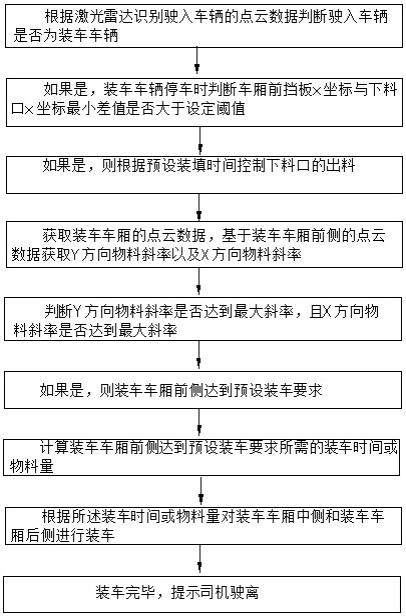
3、基于安装在车厢一侧的激光雷达识别驶入车辆的点云数据,并判断驶入车辆是否为装车车辆;
4、如果是,则在装车车辆停车时判断车厢前挡板x坐标与下料口x坐标最小差值是否大于设定阈值,且车厢偏斜角度是否小于等于预设阈值;
5、如果是,则根据预设装填时间控制下料口的出料;
6、获取装车车厢的点云数据,基于装车车厢前侧的点云数据获取y方向物料斜率以及x方向物料斜率;
7、判断y方向物料斜率是否达到最大斜率,且x方向物料斜率是否达到最大斜率;
8、如果是,则装车车厢前侧达到预设装车要求;
9、计算装车车厢前侧达到预设装车要求所需的装车时间或物料量;
10、根据所述装车时间或物料量对装车车厢中侧和装车车厢后侧进行装车;
11、装车完毕,提示司机驶离。
12、通过采用上述技术方案,通过激光雷达获取物料点云数据,然后使用点云斜率来控制自动装车的方法,通过x方向最大斜率值、y方向最大斜率值以及y方向最大高度可以实现物料料位的实时测算,也可以据此推算下料口位置与车辆挡板处料位高度的阈值,甚至可以较好的估算出已装物料的体积,从而可以及时控制车辆装料的实时状态,避免散料等问题的发生。
13、可选的,所述车厢偏移角度通过车厢的点云数据以及车厢停放标准位置的点云数据计算所得。
14、可选的,所述预设装填时间由现场实际环境设定,通过辅助工具或者人工观察第一堆料的装填时间,并以此作为依据进行参数设置。
15、可选的,所述物料高度低于车厢挡板减去一个差值的高度,所述差值由装填物料种类决定。
16、可选的,所述斜率异常时通过改变点云取点范围避开出料口遮挡物,获得计算y方向物料最大斜率以及x方向物料最大斜率。
17、可选的,所述车辆行进距离通过获取车厢后挡板在车辆移动前后的点云坐标获得。
18、可选的,所述y方向斜率计算公式为:ky=(z1-z2)/(y1-y2),所述y方向斜率计算公式为:kx=(z1-z2)/(x1-x2),其中,(y1,z1),(y2,z2)为与车厢垂直方向斜率最大的直线上的两点坐标,(x1,z1),(x2,z2)为与车厢平行方向斜率最大的直线上的两点坐标。
19、本发明提供了一种使用点云斜率控制汽车自动装车的方法,具备以下有益效果:
20、本发明提供一种使用点云斜率控制汽车自动装车的方法,通过该方法可以实现料位的实时测算,也可以据此推算下料口位置与车辆挡板处料位高度的阈值,甚至可以较好的估算出已装物料的体积,从而可以及时控制车辆装料的实时状态,避免散料等问题的发生。
技术特征:
1.一种使用点云斜率控制汽车自动装车的方法,其特征在于,包括:
2.根据权利要求1所述的一种使用点云斜率控制汽车自动装车的方法,其特征在于,所述车厢偏移角度通过车厢的点云数据以及车厢停放标准位置的点云数据计算所得。
3.根据权利要求1所述的一种使用点云斜率控制汽车自动装车的方法,其特征在于,所述预设装填时间由现场实际环境设定,通过辅助工具或者人工观察第一堆料的装填时间,并以此作为依据进行参数设置。
4.根据权利要求1所述的一种使用点云斜率控制汽车自动装车的方法,其特征在于,所述物料高度低于车厢挡板减去一个差值的高度,所述差值由装填物料种类决定。
5.根据权利要求1所述的一种使用点云斜率控制汽车自动装车的方法,其特征在于,所述斜率异常时通过改变点云取点范围避开出料口遮挡物,获得计算y方向物料最大斜率以及x方向物料最大斜率。
6.根据权利要求1所述的一种使用点云斜率控制汽车自动装车的方法,其特征在于,所述车辆行进距离通过获取车厢后挡板在车辆移动前后的点云坐标获得。
7.根据权利要求5所述的一种使用点云斜率控制汽车自动装车的方法,其特征在于,所述y方向斜率计算公式为:ky=(z1-z2)/(y1-y2),所述x方向斜率计算公式为:kx=(z1-z2)/(x1-x2),其中,(y1,z1),(y2,z2)为与车厢垂直方向斜率最大的直线上的两点坐标,(x1,z1),(x2,z2)为与车厢平行方向斜率最大的直线上的两点坐标。
技术总结
本发明提供一种使用点云斜率控制汽车自动装车的方法,该方法包括以下步骤:根据激光雷达识别驶入车辆的点云数据判断驶入车辆是否为装车车辆;则在装车车辆停车时判断车厢前挡板x坐标与下料口x坐标最小差值是否大于设定阈值,且车厢偏斜角度是否小于等于预设阈值;根据预设装填时间控制下料口的出料;获取Y方向物料斜率以及X方向物料斜率;判断Y方向物料斜率是否达到最大斜率,且X方向物料斜率是否达到最大斜率;则装车车厢前侧达到预设装车要求;根据所述装车时间或物料量对装车车厢中侧和装车车厢后侧进行装车;装车完毕,提示司机驶离;通过物料料位的实时测算,从而及时控制车辆装料的实时状态,避免散料等问题的发生。
技术研发人员:李峰,桑浩伟,曲有成,张德帅,王圣伟,王志刚,董毅
受保护的技术使用者:山东矩阵软件工程股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!