一种整体推入式物资快速装载平台
本发明属于物流,具体为一种整体推入式物资快速装载平台。
背景技术:
1、如何实现物资的快速车辆装载,一直是物流行业的一个瓶颈问题。人搬肩扛的传统装载方式,只能实现物资的零散装车,装车效率低,且耗费大量人力。采用叉车、手铲车或地牛进行作业的半自动装载方式,将托盘作为基本运输单位,虽然可以降低货物搬运次数,但仍需大量人工作业。
2、采用标准集装箱装载托盘物资,再将整集装箱物资一次性装车,可进一步提高装车效率。现有整集装箱一次性装载物资的方法,装载时先将托盘物资置于一体化底板上,然后采用大推力将托盘及物资推送进运输车辆的车厢或者集装箱,再使用挡板挡住物资后,将底板抽出,防止一体化底板抽出时带出物资。这种方法不够轻量化,在推送一体化底板和物资时,会产生较强的摩擦力,导致运行功耗过高。
3、因此,亟需一种降低运行功耗的轻量化装载物资设备。
技术实现思路
1、本发明所要解决的技术问题在于,本发明创造旨在解决托盘物资采用运输车辆或集装箱发运时底部易受损、装车效率低和不够轻量化的技术问题;意在降低运行功耗,并提升装载效率;应用范围广、通用性强,可在室内平坦环境及野外复杂地形下有效使用。
2、本发明采用的技术方案:
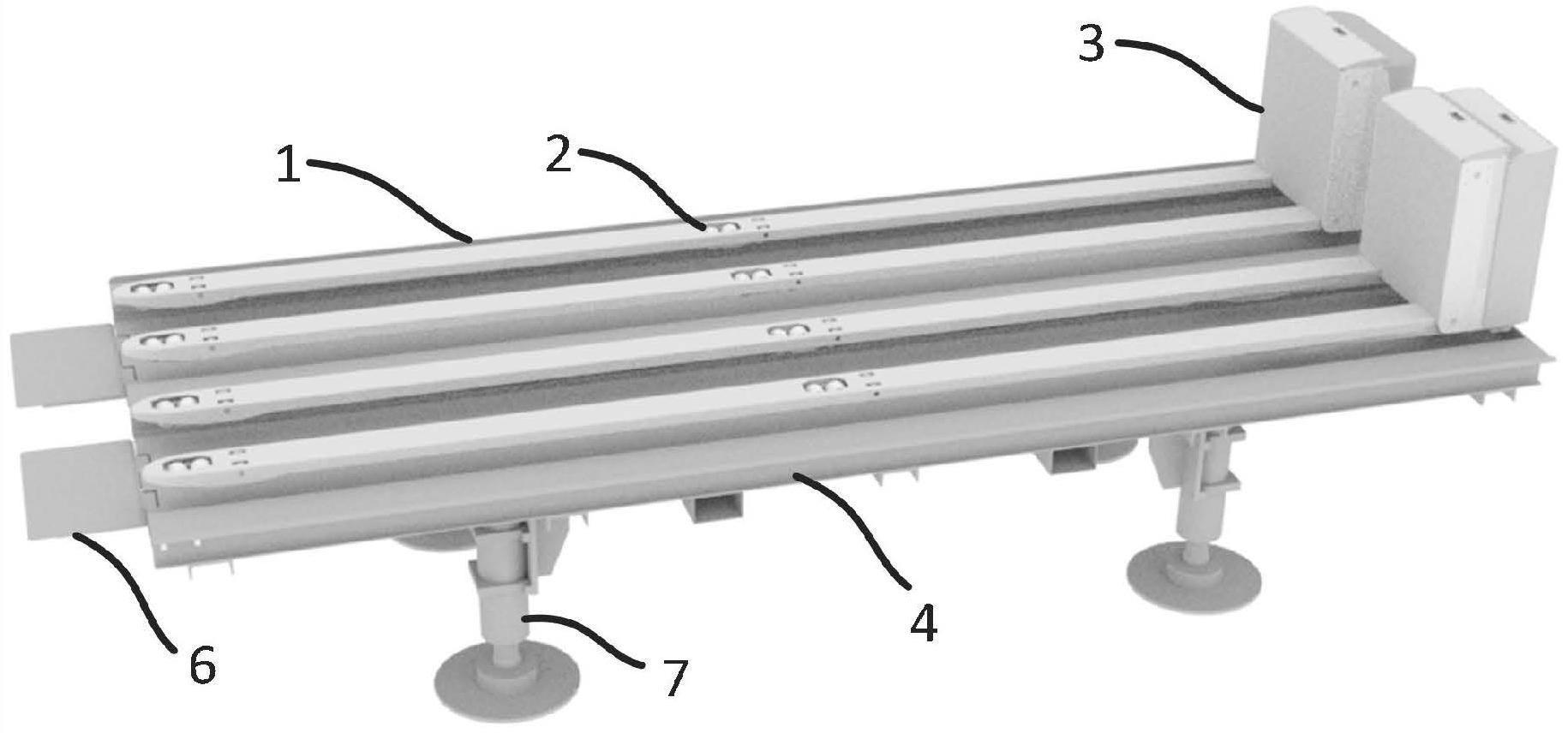
3、一种整体推入式物资快速装载平台,包括长叉齿(1)、滚轮升降装置(2)、推拉装置(3)、承托板(4)和控制单元(5)。
4、所述长叉齿(1)置于所述承托板(4)上表面,用于放置托盘物资;
5、所述滚轮升降装置(2)位于所述长叉齿(1)底部;
6、所述推拉装置(3)与所述长叉齿(1)一端固定连接,可推拉所述长叉齿(1),实现托盘物资的移动;
7、所述控制单元(5)置于所述推拉装置(3)内部,与所述滚轮升降装置(2)连接;所述控制单元(5)用于驱动所述滚轮升降装置(2)升降。
8、作为一种可选的实施方式,在本发明实施例中,整体推入式物资快速装载平台还包括搭板(6),所述搭板(6)设置在所述承托板(4)上,且远离推拉装置(3)的一端;所述搭板(6)与所述承托板(4)铰接,用于当所述承托板(4)与运输车辆或集装箱间存在间隙时,连接所述承托板(4)与运输车辆或集装箱。
9、作为一种可选的实施方式,在本发明实施例中,所述推拉装置(3)包括壳体(31)、电机(32)和驱动机构(33);
10、所述壳体(31)底部与所述长叉齿(1)固定连接;
11、所述电机(32)固定于所述壳体(31)内部;
12、所述驱动机构(33)固定于所述壳体(31)底部,在所述承托板(4)上移动,带动所述长插齿(1)移动。
13、作为一种可选的实施方式,在本发明实施例中,所述驱动机构(33)包括传动齿轮组(331)和动力轮(332);
14、所述传动齿轮组(331)与所述电机(32)连接,将所述电机(32)的动力传送至所述动力轮(332);
15、所述动力轮(332)固定于所述壳体(31)底部。
16、作为一种可选的实施方式,在本发明实施例中,所述推拉装置(3)还包括从动轮(34)和伸缩弹簧(35);
17、所述从动轮(34)位于所述壳体(31)底部两侧,用于承托所述推拉装置(3),及调整所述长插齿(1)的方向;
18、所述伸缩弹簧(35)一端与所述壳体(31)连接,另一端与所述电机(32)连接;当所述长叉齿(1)上放置托盘物资时,所述伸缩弹簧(35)压缩,动力轮(332)沿所述伸缩弹簧(35)压缩方向移动,以便所述从动轮(34)与所述动力轮(332)同时承重。
19、作为一种可选的实施方式,在本发明实施例中,所述滚轮升降装置(2)包括控制杠杆装置(21)、滑动轮组(22)、连接件(23)和液压缸(24);
20、所述控制杠杆装置(21)一端铰接在所述长叉齿(1)底部,另一端固定有所述滑动轮组(22);
21、所述连接件(23)分别连接所述控制杠杆装置(21)与所述液压缸(24);
22、所述长叉齿(1)具有滚轮升降装置(2)的一端设有滑动轮槽(11);所述滚轮升降装置(2)在收拢时,置于所述滑动轮槽(11)内。
23、作为一种可选的实施方式,在本发明实施例中,所述长叉齿(1)中间还设置有所述滑动轮槽(11)及所述滚轮升降装置(2)。
24、作为一种可选的实施方式,在本发明实施例中,整体推入式物资快速装载平台还包括多个升降柱(7);多个所述升降柱(7)分别与所述承托板(4)的下表面连接;
25、所述升降柱(7)高度可分别调整,使所述长插齿(1)在作业时保持水平。
26、作为一种可选的实施方式,在本发明实施例中,所述控制单元(5)包括控制信号接收模块、电机控制模块、高度控制模块和升降控制模块;
27、所述控制信号接收模块用于接收外部控制信号,并转发至对应的所述电机控制模块、高度控制模块和升降控制模块;所述电机控制模块用于根据接收的所述外部控制信号,控制所述电机(32)的旋转方向和转速;所述高度控制模块用于根据接收的所述外部控制信号,控制所述升降柱(7)的高度;所述升降控制模块用于根据接收的所述外部控制信号,控制所述液压缸(24)的运行。
28、作为一种可选的实施方式,在本发明实施例中,所述推拉装置(3)与2个所述长叉齿(1)固定连接。
29、与现有技术相比,本发明实施例具有以下有益效果:
30、本发明利用控制单元控制滚轮升降装置的升降,当需要推送托盘物资时,将托盘物资置于长叉齿上,利用滚轮升降装置抬起长叉齿,将长叉齿上放置的物资抬高,减小推送时长叉齿与承托板及运输车辆或集装箱底部之间的摩擦力,避免了传统摩擦力卸车方式对运输车辆或集装箱底部的损伤,大幅度降低了设备的运行功耗,并提升了装载效率;利用高度可分别调整的升降柱保持水平作业,可在室内平坦环境及野外复杂地形下有效使用,通用性强。
技术特征:
1.一种整体推入式物资快速装载平台,其特征在于,包括长叉齿(1)、滚轮升降装置(2)、推拉装置(3)、承托板(4)和控制单元(5);
2.根据权利要求1所述的一种整体推入式物资快速装载平台,其特征在于,还包括搭板(6),所述搭板(6)设置在所述承托板(4)上,且远离推拉装置(3)的一端;所述搭板(6)与所述承托板(4)铰接,用于当所述承托板(4)与运输车辆或集装箱间存在间隙时,连接所述承托板(4)与运输车辆或集装箱。
3.根据权利要求1所述的一种整体推入式物资快速装载平台,其特征在于,所述推拉装置(3)包括壳体(31)、电机(32)和驱动机构(33);
4.根据权利要求3所述的一种整体推入式物资快速装载平台,其特征在于,所述驱动机构(33)包括传动齿轮组(331)和动力轮(332);
5.根据权利要求3所述的一种整体推入式物资快速装载平台,其特征在于,所述推拉装置(3)还包括从动轮(34)和伸缩弹簧(35);
6.根据权利要求1所述的一种整体推入式物资快速装载平台,其特征在于,所述滚轮升降装置(2)包括控制杠杆装置(21)、滑动轮组(22)、连接件(23)和液压缸(24);
7.根据权利要求6所述的一种整体推入式物资快速装载平台,其特征在于,所述长叉齿(1)中间还设置有所述滑动轮槽(11)及所述滚轮升降装置(2)。
8.根据权利要求6所述的一种整体推入式物资快速装载平台,其特征在于,还包括多个升降柱(7);多个所述升降柱(7)分别与所述承托板(4)的下表面连接;
9.根据权利要求8所述的一种整体推入式物资快速装载平台,其特征在于,所述控制单元(5)包括控制信号接收模块、电机控制模块、高度控制模块和升降控制模块;
10.根据权利要求1所述的一种整体推入式物资快速装载平台,其特征在于,所述推拉装置(3)与2个所述长叉齿(1)固定连接。
技术总结
本发明公开了一种整体推入式物资快速装载平台,包括长叉齿、滚轮升降装置、推拉装置、承托板和控制单元;长叉齿置于承托板上表面,用于放置托盘物资;滚轮升降装置位于长叉齿底部;推拉装置与长叉齿一端固定连接,可推拉长叉齿,实现托盘物资的移动;控制单元置于推拉装置内部,与滚轮升降装置连接,用于驱动滚轮升降装置升降;可见,本发明公开的整体推入式物资快速装载平台能够降低运行功耗,并提升装载效率,且应用范围广、通用性强,可在室内平坦环境及野外复杂地形下有效使用。
技术研发人员:高飞,刘振华,林婉妮,刘明政,张建民,刘小平,赵吉敏,连尧,王郭俊
受保护的技术使用者:中国人民解放军军事科学院系统工程研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!