一种用于高精度环库的控制系统的制作方法
本发明属于智能仓储领域,涉及一种用于高精度环库的控制系统。
背景技术:
1、随着各行各业的智能化的高速发展,对于将工厂打造成高效的智能化仓储的需求越来越多;其中各个行业对于之智能化立体仓储的需求也越来也高,尤其是环形库位的发展,因其节省地面空间,利用率高等特点尤为突出;目前市场是采用比较多的是机器人环库(机器人本体为执行机构,与环形拼式货架组合成智能立体库)其特点是节拍效率高、性能稳定,实施周期短等特点,但机器人的活动空间有限且价格昂贵。
2、目前市场针对环形库堆垛机的定位采用电机带动齿轮的控制系统,但此方法对于机械结构、安装有着极高的要求,并且也无法保证其一直是高精度的状态,对其材料和加工的成本也有着更高的成本。此控制系统是我们采用市面上比较常见的伺服电机+cnc多轴控制器的方式。利用伺服电机高精度特点的用时,采用电机的速度控制环+外部码带实现位置环的双换控制系统实现环形库堆垛机的高精度定位。上述方式容易受机械材料结构和加工精度的影响,很难保证测量产品的货期和价格优势。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种用于高精度环库的控制系统。
2、为实现上述目的,本发明采用如下技术方案:
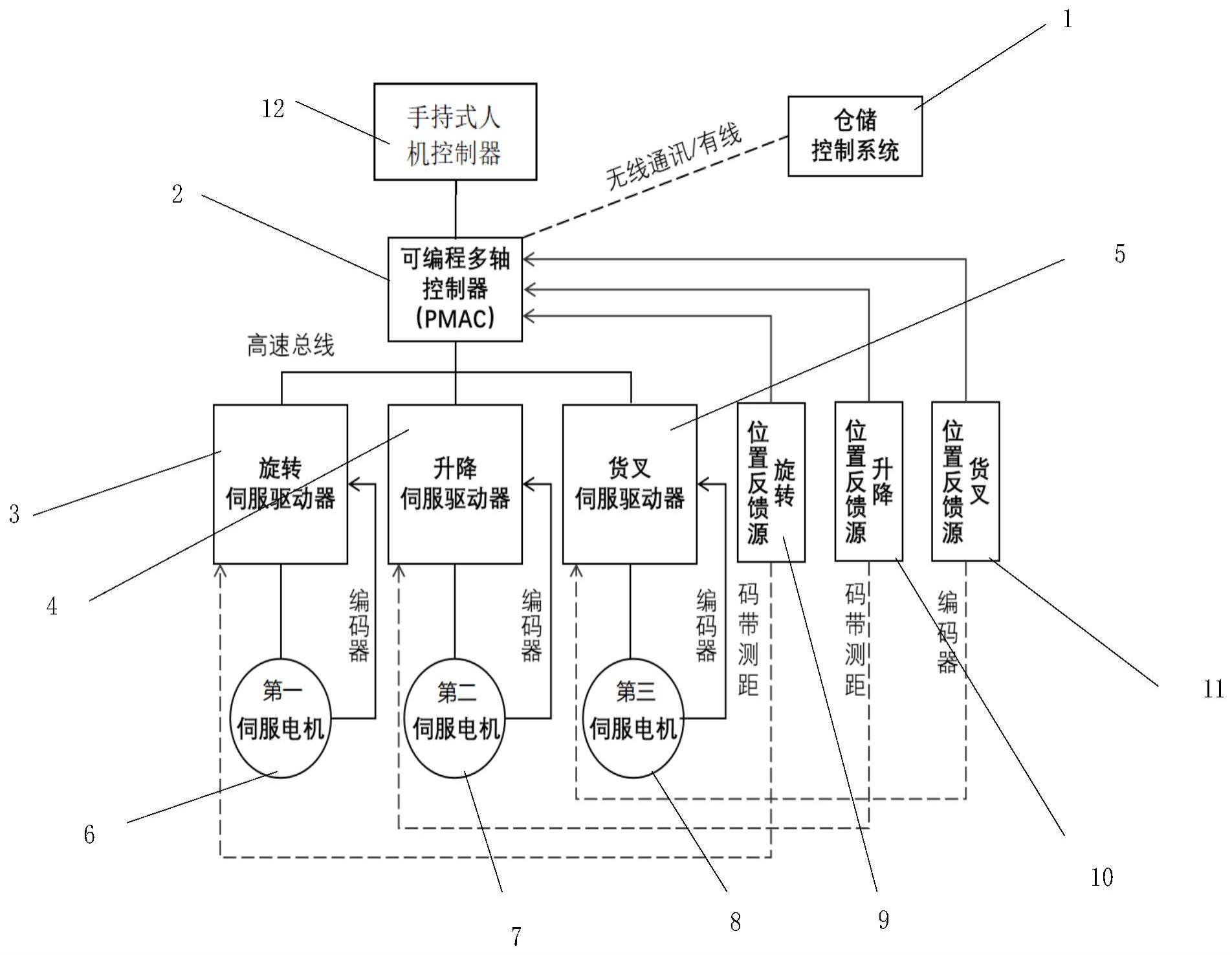
3、一种用于高精度环库的控制系统,包括仓储控制系统,仓储控制系统与可编程多轴控制器相通讯连接,所述可编程多轴控制器与旋转伺服驱动器相通讯连接,所述可编程多轴控制器与升降伺服驱动器相通讯连接,所述可编程多轴控制器与货叉伺服驱动器相通讯连接,旋转伺服驱动器、升降伺服驱动器和货叉伺服驱动器分别与第一伺服电机、第二伺服电机和第三伺服电机相电控连接,还包括有旋转位置反馈单元、升降位置反馈单元和货叉位置反馈单元,所述旋转位置反馈单元、升降位置反馈单元和货叉位置反馈单元分别与旋转伺服驱动器、升降伺服驱动器和货叉伺服驱动器相通信连接,通过旋转位置反馈单元升降位置反馈单元和货叉位置反馈单元来获得当前货叉的速度环的控制和位置环的控制。
4、优选地,所述的一种用于高精度环库的控制系统,所述速度环的反馈装置安装于对应的伺服电机电机的尾部,位置环的反馈装置安装于运动负载设备上。
5、优选地,所述的一种用于高精度环库的控制系统,其特征在于:所述反馈装置为测距码带。
6、优选地,所述的一种用于高精度环库的控制系统,其特征在于:所述位置环的采集通过把控制速度环的伺服编码器和控制位置环的测距码带采集上来的数据进行pid控制。
7、优选地,所述的一种用于高精度环库的控制系统,其特征在于:所述位置环把速度环的伺服编码器数据和位置环的测距码带数据通过总线形式直接由多轴控制器采集,通过cnc的高精度的pid程序算法处理,然后再通过伺服系统进行定位操作。
8、优选地,所述的一种用于高精度环库的控制系统,所述可编程多轴控制器与手持式人机控制器相通讯连接。
9、借由上述方案,本发明至少具有以下优点:
10、本发明结合了码带测距的广泛性和数据采集的稳定性、高速总线通讯的特点以及伺服系统和多轴控制系统的全闭环的控制模式,实现了环形堆垛机设备的测距定位功能,本发明可以实现高精度的定位、运行平整可靠和高效,能有效提高工作效率。
11、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种用于高精度环库的控制系统,其特征在于,包括仓储控制系统(1),仓储控制系统(1)与可编程多轴控制器(2)相通讯连接,所述可编程多轴控制器(2)与旋转伺服驱动器(3)相通讯连接,所述可编程多轴控制器(2)与升降伺服驱动器(4)相通讯连接,所述可编程多轴控制器(2)与货叉伺服驱动器(5)相通讯连接,旋转伺服驱动器(3)、升降伺服驱动器(4)和货叉伺服驱动器(5)分别与第一伺服电机(6)、第二伺服电机(7)和第三伺服电机(8)相电控连接,还包括有旋转位置反馈单元(9)、升降位置反馈单元(10)和货叉位置反馈单元(11),所述旋转位置反馈单元(9)、升降位置反馈单元(10)和货叉位置反馈单元(11)分别与旋转伺服驱动器(3)、升降伺服驱动器(4)和货叉伺服驱动器(5)相通信连接,通过旋转位置反馈单元(9)、升降位置反馈单元(10)和货叉位置反馈单元(11)来获得当前货叉的速度环的控制和位置环的控制。
2.根据权利要求1所述的一种用于高精度环库的控制系统,其特征在于:所述速度环的反馈装置安装于对应的伺服电机电机的尾部,位置环的反馈装置安装于运动负载设备上。
3.根据权利要求2所述的一种用于高精度环库的控制系统,其特征在于:所述反馈装置为测距码带。
4.根据权利要求1所述的一种用于高精度环库的控制系统,其特征在于:所述位置环的采集通过把控制速度环的伺服编码器和控制位置环的测距码带采集上来的数据进行pid控制。
5.根据权利要求1所述的一种用于高精度环库的控制系统,其特征在于:所述位置环把速度环的伺服编码器数据和位置环的测距码带数据通过总线形式直接由多轴控制器采集,通过cnc的高精度的pid程序算法处理,然后再通过伺服系统进行定位操作。
6.根据权利要求1所述的一种用于高精度环库的控制系统,其特征在于:所述可编程多轴控制器(2)与手持式人机控制器(12)相通讯连接。
技术总结
本发明涉及一种用于高精度环库的控制系统,包括仓储控制系统,仓储控制系统与可编程多轴控制器相通讯连接,可编程多轴控制器与旋转伺服驱动器相通讯连接,可编程多轴控制器与升降伺服驱动器相通讯连接,可编程多轴控制器与货叉伺服驱动器相通讯连接,旋转伺服驱动器、升降伺服驱动器和货叉伺服驱动器分别与第一伺服电机、第二伺服电机和第三伺服电机相电控连接,还包括有旋转位置反馈单元、升降位置反馈单元和货叉位置反馈单元,旋转位置反馈单元、升降位置反馈单元和货叉位置反馈单元分别与旋转伺服驱动器、升降伺服驱动器和货叉伺服驱动器相通信连接。本发明能提高工作的效率。
技术研发人员:高秀财,郭潇雨,蒋晓宁,刘霞进
受保护的技术使用者:昆山同日智能制造技术研究院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!