一种运输装置的制作方法
本发明涉及智能设备制造,特别涉及一种运输装置。
背景技术:
1、自动导引运输车(automated guided vehicle,简称agv)通常也称为agv小车,一般是指具有自动导航功能,即能够沿规定的导航路径行驶的运输装置。例如,能够用agv搬运3500kg的重型卷料。
2、现有技术中,大多数场景下采用操作工加手动天车/桁架的方式搬运重型卷料。人工操作时,对操作技术要求高,并且效率低下,容易发生碰撞。
3、此外,有少量厂商在该场景下应用了agv搬运重型卷料。但是,完成空满切换(拾取料卷,并放置空卷轴)需要两次搬运动作,生产效率较低。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种运输装置,通过单次搬运任务即可完成空满切换,有利于提高生产效率。
2、为实现上述目的,本发明提供如下技术方案:
3、一种运输装置,包括:
4、机体,设置有行走机构;
5、取料机构,与所述机体连接,用于摘取目标位置的料卷;
6、放料机构,与所述机体连接,用于将空卷轴放置在所述目标位置。
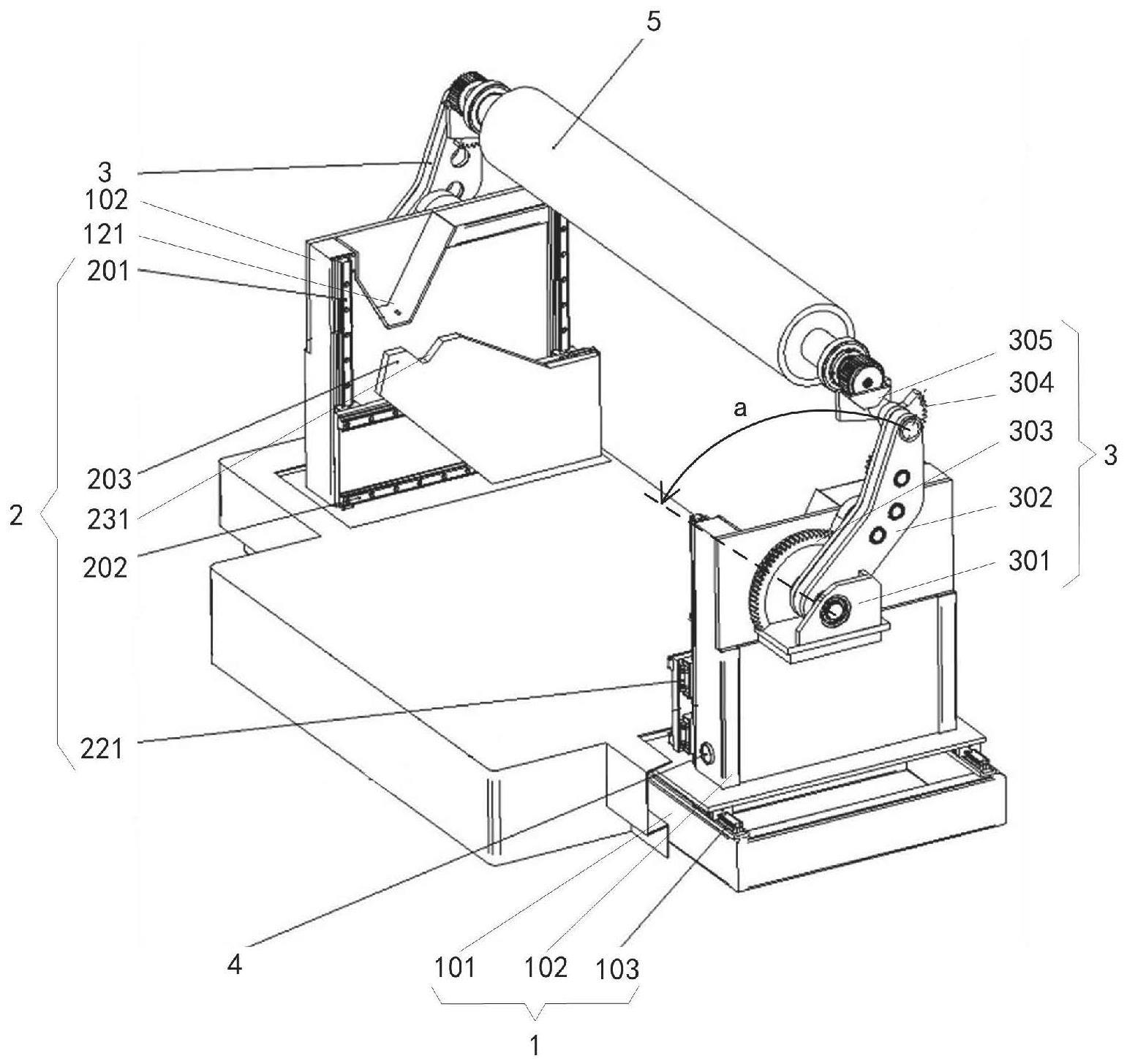
7、可选地,在上述运输装置中,所述放料机构包括:
8、旋臂,可相对转动地设置在所述机体上,并设置有用于放置所述空卷轴的第一承载部;
9、第一驱动机构,用于控制所述旋臂相对所述机体转动,以将所述空卷轴由第一初始位置移动至所述目标位置,或控制所述旋臂复位。
10、可选地,在上述运输装置中,所述第一承载部包括用于对所述空卷轴进行水平支撑的第一限位槽,所述第一限位槽与所述旋臂转动连接。
11、可选地,在上述运输装置中,还包括第一齿轮和第二齿轮;
12、所述第一齿轮与所述机体固定连接,所述旋臂的转动中心轴线与所述第一齿轮的中心轴线共线;
13、所述第二齿轮与所述第一承载部固定连接,且与所述旋臂转动连接,所述第二齿轮的转动中心轴线与所述旋臂的转动中心轴线平行;
14、所述第一齿轮和所述第二齿轮传动连接,若所述旋臂相对所述第一齿轮转动角度为a,则所述第二齿轮相对所述旋臂转动角度为﹣a。
15、可选地,在上述运输装置中,所述取料机构包括:
16、第二承载部,用于承接所述料卷;
17、第二驱动机构,用于控制所述第二承载部沿导向机构由第二初始位置移动至所述目标位置,或控制所述第二承载部复位。
18、可选地,在上述运输装置中,所述第二承载部设置有用于对所述料卷进行水平支撑的第二限位槽;
19、所述机体设置有用于放置所述料卷的第三限位槽;
20、所述第二承载部位于所述第二初始位置时,所述第二限位槽位于所述第三限位槽的正下方。
21、可选地,在上述运输装置中,还包括:
22、导航系统,用于控制所述运输装置移动至导航终止位,所述导航终止位位于所述目标位置的附近;
23、对位系统,用于检测所述导航终止位和标准取料位之间的位置偏差,并调整所述运输装置移动以减小所述位置偏差,所述运输装置位于所述标准取料位时所述位置偏差为零。
24、可选地,在上述运输装置中,所述机体包括:
25、底盘,设置有所述行走机构;
26、立柱,与所述取料机构、所述放料机构连接;
27、第三驱动机构,与所述对位系统信号连接,能够根据所述位置偏差调整所述立柱相对所述底盘水平移动减小所述位置偏差。
28、可选地,在上述运输装置中,所述对位系统包括:
29、二维码标签,设置于所述目标位置的侧面或所述目标位置的附近;
30、二维码相机,设置于所述立柱,与所述第三驱动机构信号连接,用于对所述二维码标签进行拍照测量以获得所述位置偏差,并根据所述位置偏差控制所述立柱相对所述底盘水平移动减小所述位置偏差。
31、可选地,在上述运输装置中,所述机体包括:
32、主体部,所述主体部设置有所述行走机构,且与所述取料机构、所述放料机构连接;
33、凸起部,所述凸起部凸出设置在所述主体部的取料侧,且设置有支撑轮。
34、从上述技术方案可以看出,本发明提供的运输装置中设置有双料位,即用于拾取料卷的取料机构和用于放置空卷轴的放料机构。从而,当运输装置移动到目标位置附近的取料位置时,便可先后进行拾取料卷、在目标位置上放置空卷轴两个动作,无需切换不同的运输装置来进行上述取放料的动作,也无需中转工位,即单次搬运任务即可完成空满切换,有利于提高生产效率。
技术特征:
1.一种运输装置,其特征在于,包括:
2.根据权利要求1所述的运输装置,其特征在于,所述放料机构(3)包括:
3.根据权利要求2所述的运输装置,其特征在于,所述第一承载部(305)包括用于对所述空卷轴(5)进行水平支撑的第一限位槽,所述第一限位槽与所述旋臂(302)转动连接。
4.根据权利要求2所述的运输装置,其特征在于,还包括第一齿轮(303)和第二齿轮(304);
5.根据权利要求1所述的运输装置,其特征在于,所述取料机构(2)包括:
6.根据权利要求5所述的运输装置,其特征在于,所述第二承载部(203)设置有用于对所述料卷(7)进行水平支撑的第二限位槽(231);
7.根据权利要求1所述的运输装置,其特征在于,还包括:
8.根据权利要求7所述的运输装置,其特征在于,所述机体(1)包括:
9.根据权利要求8所述的运输装置,其特征在于,所述对位系统包括:
10.根据权利要求1至9任一项所述的运输装置,其特征在于,所述机体(1)包括:
技术总结
本发明公开了一种运输装置,该运输装置包括机体、取料机构、放料机构。机体设置有行走机构;取料机构与机体连接,用于摘取目标位置的料卷;放料机构与机体连接,用于将空卷轴放置在目标位置。当运输装置移动到机台附近的取料位置时,便可先后进行拾取料卷、在机台上放置空卷轴两个动作,无需切换不同的运输装置来进行上述取放料的动作,也无需中转工位,即单次搬运任务即可完成空满切换,有利于提高生产效率。
技术研发人员:李先锋,郭承志,杨金龙
受保护的技术使用者:三一机器人科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!