一种基于物料位置的提升机控制方法及控制装置与流程
本发明涉及烟草加工,特别涉及一种基于物料位置的提升机控制方法及控制装置。
背景技术:
1、烟丝的生产过程中为了保证电子皮带秤上物料流量的稳定,一般需要提前在电子皮带秤前设置一个计量槽,从而起到存储物料并规整物料进入电子皮带秤前的流量的作用,而为了减少流量的波动,计量槽中物料流量的稳定性则至关重要。现有技术的计量槽控制方式多采用的是在计量槽外壁安装两对物料检测光电管,通过物料在计量槽内的料位来控制提升机的启停及速度。具体地,在物料的低料位和高料位分别设置一对光电管,当物料位于低料位以下时,提升机高频运行;当物料位于高料位以上时,提升机停止运行,提升机停止供料;当物料位于低料位和高料位之间时,提升机以恒定频率低频运行。
2、然而,但是现有的控制方式过于单一,仅仅是通过设定固定频率控制上游提升机的运行速度,但是提升机的运行频率在高低频之间来回切换,易造成堵料或流量不足甚至造成断料,并且提升机启停频繁,提升机的故障率高。
技术实现思路
1、本发明的目的在于解决现有技术中提升机的运行频率在高低频之间来回切换,易造成计量槽堵料或流量不足甚至造成断料,并且提升机启停频繁,提升机的故障率高的问题。本发明提供了一种基于物料位置的提升机控制方法及控制装置,能够使提升机的供料频率实现无极调整,同时解决了提升机频繁启停及供料不足或计量槽堵料的问题。
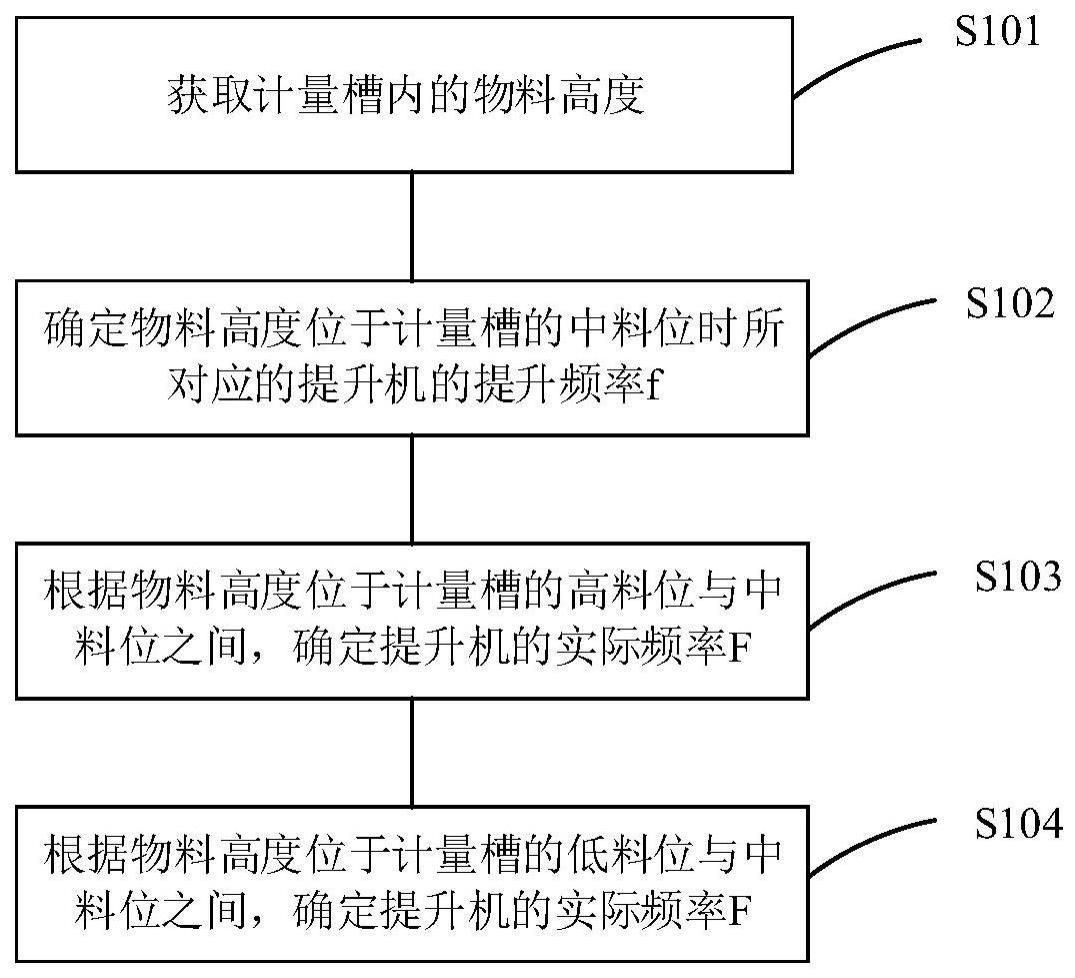
2、为解决上述技术问题,本发明的实施方式提供了一种基于物料位置的提升机控制方法,提升机的下游设备依次设置计量槽和电子皮带秤,计量槽竖直设置,提升机的顶端与计量槽的上部槽口连接,计量槽的底部与电子皮带秤连接,计量槽内包括高料位、中料位、低料位三个料位,控制方法包括:
3、获取计量槽内的物料高度;
4、确定物料高度位于计量槽的中料位时所对应的提升机的提升频率f;
5、根据物料高度位于计量槽的高料位与中料位之间,确定提升机的实际频率f为:f=f*(1-h/h1);
6、根据物料高度位于计量槽的低料位与中料位之间,确定提升机的实际频率f为:f=f+(fmax-f)*h/h2;
7、其中,f代表物料高度位于中料位时所对应的提升机的提升频率,fmax代表提升机的最大提升频率,h1代表高料位与中料位之间的高度差,h2代表中料位与低料位之间的高度差,h代表计量槽内的物料高度与中料位之间的高度差的绝对值。
8、根据本发明的另一具体实施方式,还包括:
9、根据物料高度位于高料位以上时,确定提升机的提升频率为0;
10、根据物料高度位于低料位以下时,确定提升机的提升频率为fmax。
11、根据本发明的另一具体实施方式,物料高度位于计量槽的中料位时,提升机的供料流量与电子皮带秤设定的输出流量相等。
12、根据本发明的另一具体实施方式,确定物料高度位于计量槽的中料位时所对应的提升机的提升频率f,包括:
13、确定单位长度的提升机物料重量;
14、通过单位长度的提升机物料重量和提升机的瞬时供料流量,获得提升机的运行速度;
15、根据提升机的运行速度,获得提升机的转速;
16、根据提升机的转速获得提升频率f:
17、f=m*i*p/60*ρ*a*l*r*π
18、其中,ρ代表物料密度,a代表提升机的物料厚度,l代表提升机的布料宽度,m为单位时间的提升机的供料流量,i代表提升机的电机减速器的传动比,p代表提升机的电机的旋转磁场的极对数。
19、根据本发明的另一具体实施方式,计量槽的内侧壁上设置对射式光栅或者条形码以获取计量槽内的物料高度。
20、本发明的实施方式还提供了一种基于物料位置的提升机控制装置,提升机的下游设备依次设置计量槽和电子皮带秤,计量槽竖直设置,提升机的顶端与计量槽的上部槽口连接,计量槽的底部与电子皮带秤连接,计量槽内包括高料位、中料位、低料位三个料位,控制装置包括:
21、高度获取单元,用于获取计量槽内的物料高度;
22、中料位提升频率确定单元,用于确定物料高度位于计量槽的中料位时所对应的提升机的提升频率f;
23、第一实际频率确定单元,用于根据物料高度位于计量槽的高料位与中料位之间,确定提升机的实际频率f为:f=f*(1-h/h1);
24、第二实际频率确定单元,用于根据物料高度位于计量槽的低料位与中料位之间,确定提升机的实际频率f为:f=f+(fmax-f)*h/h2;
25、其中,f代表物料高度位于中料位时所对应的提升机的提升频率,fmax代表提升机的最大提升频率,h1代表高料位与中料位之间的高度差,h2代表中料位与低料位之间的高度差,h代表计量槽内的物料高度与中料位之间的高度差的绝对值。
26、根据本发明的另一具体实施方式,还包括:
27、高料位提升频率确定单元,用于根据物料高度位于高料位以上时,确定提升机的提升频率为0;
28、低料位提升频率确定单元,用于根据物料高度位于低料位以下时,确定提升机的提升频率为fmax。
29、根据本发明的另一具体实施方式,中料位提升频率确定单元中,物料高度位于计量槽的中料位时,提升机的供料流量与电子皮带秤设定的输出流量相等。
30、根据本发明的另一具体实施方式,中料位提升频率确定单元包括:
31、重量确定子单元,用于确定单位长度的提升机物料重量;
32、运行速度确定子单元,用于通过单位长度的提升机物料重量和提升机的瞬时供料流量,获得提升机的运行速度;
33、转速确定子单元,用于根据提升机的运行速度,获得提升机的转速;
34、提升频率确定子单元,用于根据提升机的转速获得提升频率f:
35、f=m*i*p/60*ρ*a*l*r*π
36、其中,ρ代表物料密度,a代表提升机的物料厚度,l代表提升机的布料宽度,m为单位时间的提升机的供料流量,i代表提升机的电机减速器的传动比,p代表提升机的电机的旋转磁场的极对数。
37、根据本发明的另一具体实施方式,还包括物料高度检测单元,物料高度检测单元为计量槽内侧壁上设置的对射式光栅或者条形码,用于获取计量槽内的物料高度。
38、根据本发明提供的基于物料位置的提升机控制方法及控制装置,通过获取物料的实际物料高度以及确定物料位于中料位时的提升机的提升频率,根据物料的实际物料高度距离中料位的物料高度位置,确定提升机的实际提升频率,可以实现提升机的供料频率的无极调整,能够根据物料的实际位置不断调节物料的供料流量,实现计量槽内的物料始终处于中部空间,保障供料流量的稳定性,避免了流量波动和断料的发生,同时解决了提升机频繁启停的问题。
技术特征:
1.一种基于物料位置的提升机控制方法,其特征在于,所述提升机的下游设备依次设置计量槽和电子皮带秤,所述计量槽竖直设置,所述提升机的顶端与计量槽的上部槽口连接,所述计量槽的底部与电子皮带秤连接,所述计量槽内包括高料位、中料位、低料位三个料位,所述控制方法包括:
2.根据权利要求1所述的控制方法,其特征在于,还包括:
3.根据权利要求1所述的控制方法,其特征在于,所述物料高度位于所述计量槽的所述中料位时,所述提升机的供料流量与所述电子皮带秤设定的输出流量相等。
4.根据权利要求3所述的控制方法,其特征在于,所述确定所述物料高度位于所述计量槽的所述中料位时所对应的所述提升机的提升频率f,包括:
5.根据权利要求1所述的控制方法,其特征在于,所述计量槽的内侧壁上设置对射式光栅或者条形码以获取所述计量槽内的物料高度。
6.一种基于物料位置的提升机控制装置,其特征在于,所述提升机的下游设备依次设置计量槽和电子皮带秤,所述计量槽竖直设置,所述提升机的顶端与计量槽的上部槽口连接,所述计量槽的底部与电子皮带秤连接,所述计量槽内包括高料位、中料位、低料位三个料位,所述控制装置包括:
7.根据权利要求6所述的控制装置,其特征在于,还包括:
8.根据权利要求6所述的控制装置,其特征在于,所述中料位提升频率确定单元中,所述物料高度位于所述计量槽的所述中料位时,所述提升机的供料流量与所述电子皮带秤设定的输出流量相等。
9.根据权利要求8所述的控制装置,其特征在于,所述中料位提升频率确定单元包括:
10.根据权利要求6所述的控制装置,其特征在于,还包括物料高度检测单元,所述物料高度检测单元为所述计量槽内侧壁上设置的对射式光栅或者条形码,用于获取所述计量槽内的物料高度。
技术总结
本发明公开了一种基于物料位置的提升机控制方法及控制装置,控制方法包括:获取计量槽内的物料高度;确定物料高度位于计量槽的中料位时所对应的提升机的提升频率f;根据物料高度位于计量槽的高料位与中料位之间,确定提升机的实际频率;根据物料高度位于计量槽的低料位与中料位之间,确定提升机的实际频率。本发明能够使提升机的供料频率实现无极调整,同时解决了提升机频繁启停及供料不足或计量槽堵料的问题。
技术研发人员:张敏,杨荣松,朱剑凌,唐伟,张志成,林兴,周全,冯印宗,李健,陆道新,李娜,杨波
受保护的技术使用者:贵州中烟工业有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!