一种高效物流搬运系统及方法与流程
本发明属于仓储物流管理领域,特别是涉及一种高效物流搬运系统及方法。
背景技术:
1、仓库管理也叫仓储管理,指的是对仓储货物的收发、结存等活动的有效控制,其目的是为企业保证仓储货物的完好无损,确保生产经营活动的正常进行,并在此基础上对各类货物的活动状况进行分类记录,以明确的图表方式表达仓储货物在数量、品质方面的状况,以及地理位置、部门、订单归属和仓储分散程度等情况的综合管理形式。仓库管理是企业生产过程中的一个非常重要的环节,仓库管理系统的完善能够大大降低仓库运行成本。
2、目前,大部分的物流搬运都是通过人力进行的,由于人力有限,在拿取较大较高的物体时并不方便,且人为的管理也是现在物流领域的一大难题,同时现有技术中存放货物的位置较为杂乱,无法进行合理的规划。
技术实现思路
1、本发明的目的是提供一种高效物流搬运系统及方法,以解决上述现有技术存在的问题。
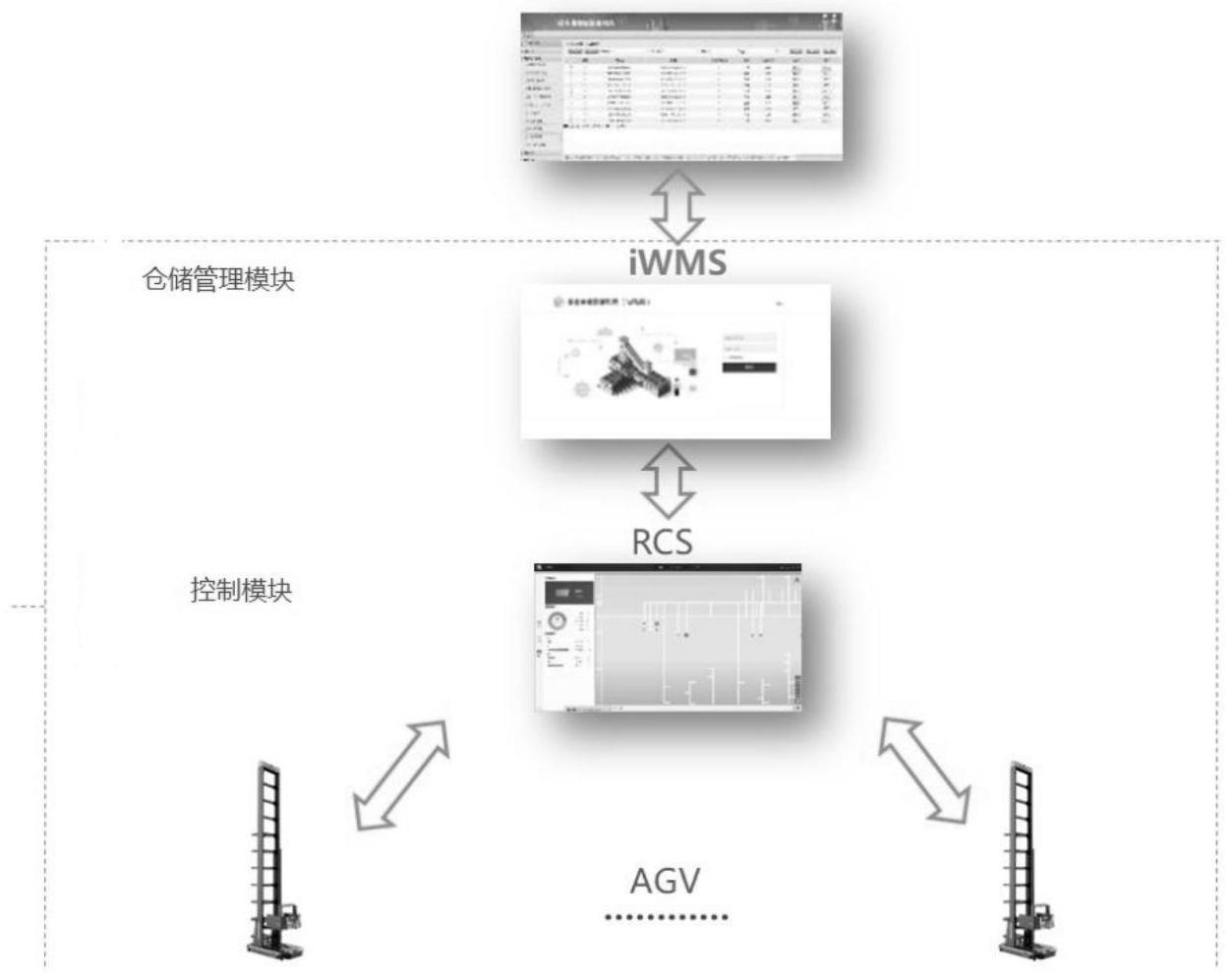
2、一方面为实现上述目的,本发明提供了一种高效物流搬运系统,包括:仓储模块、仓储管理模块、控制模块和显示模块;
3、其中,所述仓储模块用于存储货物;
4、所述仓储管理模块用于数据管理和发出管理指令;
5、所述控制模块用于控制物流机器人和路线规划;
6、所述显示模块用于显示各个模块的运行状态。
7、可选的,所述仓储模块包括货架,所述货架用于存放货物并设置有亮灯拣选装置,通过所述亮灯拣选装置对所述货架上的货物进行读取,得到货物位置数据并传送到所述仓储管理模块和所述显示模块。
8、可选的,所述仓储管理模块包括数据管理子模块、任务管理子模块;
9、其中,所述数据管理子模块用于仪器数据管理、料箱管理、货物数据管理;
10、所述任务管理子模块用于发出管理指令;
11、所述管理指令包括出入库任务管理指令和货架布局规划管理指令。
12、可选的,所述控制模块包括机器人控制子模块和路线规划子模块;
13、其中,所述机器人控制子模块用于对物流机器人进行控制,所述路线规划子模块用于对物流机器人的行驶路线进行规划。
14、可选的,所述物流机器人为潜伏式agv机器人,用于运输货物;
15、所述潜伏式agv机器人中集成有wifi模块,所述潜伏式agv机器人通过所述wifi模块与控制模块进行无线通讯。
16、另一方面为实现上述目的,本发明提供了一种高效物流搬运方法,包括:通过仓储管理模块对货架进行规划布局并发出出入库指令,基于所述出入库指令通过控制模块对物流机器人的路线进行规划,得到路线规划数据,所述物流机器人基于所述路线规划数据进行货物运输。
17、可选的,在货物运输过程中,当所述货物进入或离开所述货架时,通过亮灯拣选装置对所述货物进行读取,得到货物数据并传送到所述仓储管理模块和显示模块进行数据存储和显示。
18、本发明的技术效果为:本发明通过仓储管理模块对楼层中各个装备进行合理规划布局,来提高库容量、通过应用潜伏式agv机器人和管理控制模块提高检定物品流转效率和降低劳动强度、提升业务信息化水平等目标;出现任务无法正常执行时,能够快速对异常任务进行处理,让系统能够继续正常执行任务。
技术特征:
1.一种高效物流搬运系统,其特征在于,包括:
2.根据权利要求1所述的一种高效物流搬运系统,其特征在于,
3.根据权利要求1所述的一种高效物流搬运系统,其特征在于,
4.根据权利要求1所述的一种高效物流搬运系统,其特征在于,
5.根据权利要求4所述的一种高效物流搬运系统,其特征在于,
6.一种高效物流搬运方法,其特征在于,包括:
7.根据权利要求6所述的一种高效物流搬运方法,其特征在于,
技术总结
本发明公开了一种高效物流搬运系统及方法,包括:仓储模块、仓储管理模块、控制模块和显示模块;仓储模块用于存储货物;仓储管理模块用于数据管理和发出管理指令;控制模块用于控制物流机器人和路线规划;显示模块用于显示各个模块的运行状态。通过仓储管理模块对货架进行规划布局并发出出入库指令,基于出入库指令通过控制模块对物流机器人的路线进行规划,得到路线规划数据,完成高效搬运。
技术研发人员:岑志波,刘华,余善成,陈旭东,戴玲娜
受保护的技术使用者:宁波市计量测试研究院(宁波新材料检验检测中心)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!