一种搬运式工业机器人
本发明属于工业机器人,尤其涉及一种搬运式工业机器人。
背景技术:
1、在工业生产中需要经常对物件进行搬运,为了减轻工作人员的劳动负担、提高生产效率,因此在实际生产中同时使用搬运机器人对物件进行搬运作业。
2、但是现有的搬运式机器人的机械手由于夹持结构固定无法变化,因此往往只能对某种特定形状的物件进行搬运,但是在实际生产中搬运的物件的形状大多不固定,因此需要使用具有不同夹持结构的机器人进行搬运作业,不仅增加了生产成本,还降低了工作效率。
3、因此,亟需设计一种搬运式工业机器人,用以解决上述问题。
技术实现思路
1、本发明的目的是提供一种搬运式工业机器人,本发明通过设置第一夹紧组件和第二夹紧组件,实现了可变形的夹持结构,因此能够实现对不同形状的物件的夹持搬运,使得本发明具有更好的通用性。
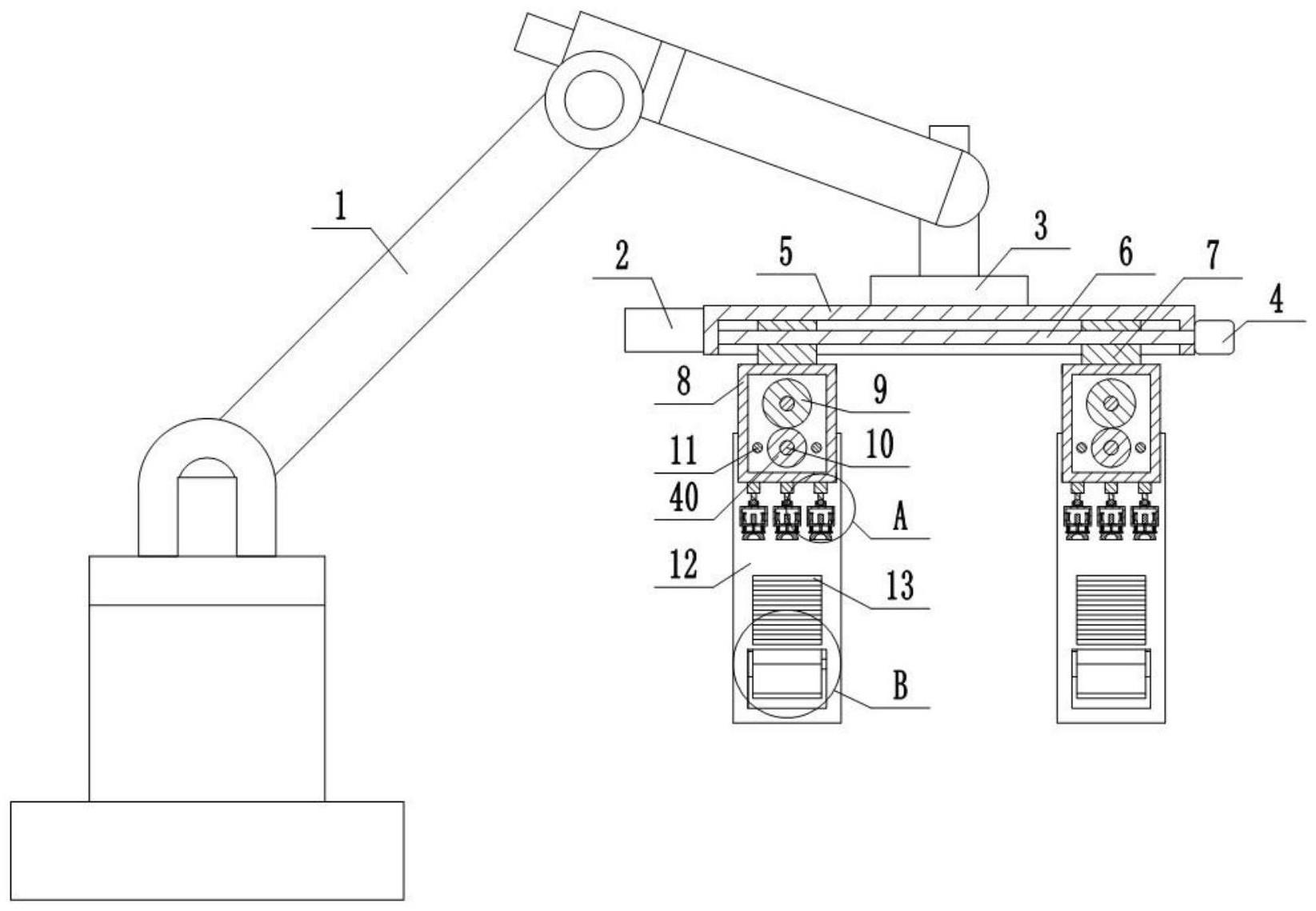
2、为实现上述目的,本发明提供了如下方案:一种搬运式工业机器人,包括:
3、机械臂,所述机械臂末端固接有连接法兰;
4、调节机构,所述调节机构包括梁体,所述梁体固接在所述连接法兰远离所述机械臂的一侧,所述梁体上安装有调节驱动部;
5、夹持机构,所述夹持机构包括第一壳体,所述第一壳体设置有两个,两所述第一壳体均位于所述梁体远离所述连接法兰的一侧,两所述第一壳体均与所述调节驱动部固接,两所述第一壳体上均安装有夹持驱动部,两所述第一壳体的两侧均设置有安装块,所述安装块与所述夹持驱动部连接,所述安装块上安装有第一夹紧组件和第二夹紧组件;
6、吸附机构,所述吸附机构包括真空泵和吸盘部,所述真空泵固接在所述梁体上,所述第一壳体远离所述梁体的一侧固接有若干所述吸盘部,若干所述吸盘部均与所述真空泵连通。
7、优选的,所述第二夹紧组件包括夹块,所述安装块底部开设有让位口,所述让位口内设置有安装板,所述让位口内转动连接有铰接轴,所述安装板固定套设在所述铰接轴上,所述夹块设置在所述安装板靠近所述第一壳体的一侧,所述夹块顶端开设有弧形槽,所述安装板远离所述夹块的一侧固接有第四气缸,所述第四气缸的活动端滑动贯穿所述安装板并与所述夹块固接,所述安装块远离所述第一壳体的一侧固接有固定板,所述固定板位于所述让位口上方,所述固定板底端铰接有第三气缸,所述第三气缸末端与所述安装板铰接。
8、优选的,所述铰接轴上转动套设有限位套,所述限位套与所述安装块固接,所述铰接轴上周向开设有两个卡槽,两所述卡槽对称设置,所述卡槽的截面形状为直角三角形,所述限位套内开设有两滑腔,两所述滑腔所呈的夹角大于两所述卡槽所呈的夹角,两所述滑腔内均滑接有卡块,所述卡块靠近所述铰接轴轴线的一侧伸出所述滑腔,所述卡块与所述卡槽相适配,所述卡块远离所述铰接轴轴线的一侧固接有第三弹簧,所述第三弹簧末端与所述滑腔内壁固接。
9、优选的,所述第一夹紧组件包括夹板,所述夹板位于所述安装块靠近所述第一壳体的一侧,所述夹板远离所述安装块的一侧固接有若干防滑凸起,所述安装块内固接有若干弹性件,所述弹性件末端与所述夹板固接。
10、优选的,所述弹性件包括滑板、第二弹簧和连接杆,所述安装块内开设有滑道,所述滑板滑接在所述滑道内,所述连接杆固接在所述滑板靠近所述夹板的一侧,所述连接杆末端伸出所述安装块并与所述夹板固接,所述第二弹簧固接在所述滑板远离所述夹板的一侧,所述第二弹簧末端与所述滑道内壁固接。
11、优选的,所述吸盘部包括吸盘,所述吸盘与所述真空泵连通,所述第一壳体底端固接有第一气缸,所述第一气缸底端固接有球头,所述球头上滑动套设有球窝,所述球窝末端固接有第二壳体,所述第二壳体内固接有第二气缸,所述第二壳体下方设置有连接板,所述第二气缸活动端滑动贯穿所述第二壳体并与所述连接板固接,所述吸盘固接在所述连接板底端。
12、优选的,所述连接板顶端固接有第二限位杆,所述第二限位杆顶端伸入所述第二壳体内,所述第二限位杆上滑动套设有滑套,所述滑套固接在所述第二壳体内,所述第二限位杆上套设有第一弹簧,所述第一弹簧位于所述第二壳体和所述连接板之间,所述第一弹簧两端分别与所述连接板和所述第二壳体固接。
13、优选的,所述夹持驱动部包括第二双向丝杠,所述第二双向丝杠转动贯穿所述第一壳体,所述第二双向丝杠与所述梁体垂直设置,所述第二双向丝杠两侧对称设置有第一限位杆,所述第一限位杆固定贯穿所述第一壳体,所述第一限位杆两端均固接有限位板,所述第二双向丝杠末端与所述限位板转动连接,所述安装块顶部螺纹套设在所述第二双向丝杠上,且所述第一限位杆滑动贯穿所述安装块,所述第一壳体外壁固接有第二电机,所述第一壳体内设置有第一齿轮和第二齿轮,所述第一齿轮与所述第二电机的输出轴同轴固接,所述第二齿轮固定套设在所述第二双向丝杠上,所述第一齿轮与所述第二齿轮相啮合。
14、优选的,所述调节驱动部包括第一双向丝杠,所述梁体远离所述连接法兰的一侧开设有滑槽,所述第一双向丝杠转动连接在所述滑槽内,所述第一双向丝杠上对称螺接有两滑块,两所述滑块均与所述滑槽滑接,两所述第一壳体分别与两所述滑块固接,所述梁体一侧固接有第一电机,所述第一电机的输出轴与所述第一双向丝杠同轴固接。
15、与现有技术相比,本发明具有如下优点和技术效果:
16、当需要对板件或方形物件进行搬运时,使夹块位于安装块远离第一壳体的一侧,通过控制夹持驱动部和调节驱动部,实现夹板对物件进行夹持搬运;当需要对柱状物件进行搬运时,使夹块位于安装块靠近第一壳体的一侧,通过控制夹持驱动部和调节驱动部,实现夹块和夹板共同对物件的夹持搬运;同时通过控制吸盘部吸附在物件表面,保障物件在搬运过程中的稳定性。本发明通过设置第一夹紧组件和第二夹紧组件,实现了可变形的夹持结构,因此能够实现对不同形状的物件的夹持搬运,使得本发明具有更好的通用性。
技术特征:
1.一种搬运式工业机器人,其特征在于,包括:
2.根据权利要求1所述的一种搬运式工业机器人,其特征在于:所述第二夹紧组件包括夹块(26),所述安装块(12)底部开设有让位口(28),所述让位口(28)内设置有安装板(25),所述让位口(28)内转动连接有铰接轴(27),所述安装板(25)固定套设在所述铰接轴(27)上,所述夹块(26)设置在所述安装板(25)靠近所述第一壳体(8)的一侧,所述夹块(26)顶端开设有弧形槽,所述安装板(25)远离所述夹块(26)的一侧固接有第四气缸(36),所述第四气缸(36)的活动端滑动贯穿所述安装板(25)并与所述夹块(26)固接,所述安装块(12)远离所述第一壳体(8)的一侧固接有固定板(34),所述固定板(34)位于所述让位口(28)上方,所述固定板(34)底端铰接有第三气缸(35),所述第三气缸(35)末端与所述安装板(25)铰接。
3.根据权利要求2所述的一种搬运式工业机器人,其特征在于:所述铰接轴(27)上转动套设有限位套(24),所述限位套(24)与所述安装块(12)固接,所述铰接轴(27)上周向开设有两个卡槽(37),两所述卡槽(37)对称设置,所述卡槽(37)的截面形状为直角三角形,所述限位套(24)内开设有两滑腔,两所述滑腔所呈的夹角大于两所述卡槽(37)所呈的夹角,两所述滑腔内均滑接有卡块(38),所述卡块(38)靠近所述铰接轴(27)轴线的一侧伸出所述滑腔,所述卡块(38)与所述卡槽(37)相适配,所述卡块(38)远离所述铰接轴(27)轴线的一侧固接有第三弹簧(39),所述第三弹簧(39)末端与所述滑腔内壁固接。
4.根据权利要求1所述的一种搬运式工业机器人,其特征在于:所述第一夹紧组件包括夹板(32),所述夹板(32)位于所述安装块(12)靠近所述第一壳体(8)的一侧,所述夹板(32)远离所述安装块(12)的一侧固接有若干防滑凸起(13),所述安装块(12)内固接有若干弹性件,所述弹性件末端与所述夹板(32)固接。
5.根据权利要求4所述的一种搬运式工业机器人,其特征在于:所述弹性件包括滑板(30)、第二弹簧(29)和连接杆(31),所述安装块(12)内开设有滑道,所述滑板(30)滑接在所述滑道内,所述连接杆(31)固接在所述滑板(30)靠近所述夹板(32)的一侧,所述连接杆(31)末端伸出所述安装块(12)并与所述夹板(32)固接,所述第二弹簧(29)固接在所述滑板(30)远离所述夹板(32)的一侧,所述第二弹簧(29)末端与所述滑道内壁固接。
6.根据权利要求1所述的一种搬运式工业机器人,其特征在于:所述吸盘部包括吸盘(23),所述吸盘(23)与所述真空泵(2)连通,所述第一壳体(8)底端固接有第一气缸(14),所述第一气缸(14)底端固接有球头(15),所述球头(15)上滑动套设有球窝(16),所述球窝(16)末端固接有第二壳体(17),所述第二壳体(17)内固接有第二气缸(20),所述第二壳体(17)下方设置有连接板(22),所述第二气缸(20)活动端滑动贯穿所述第二壳体(17)并与所述连接板(22)固接,所述吸盘(23)固接在所述连接板(22)底端。
7.根据权利要求6所述的一种搬运式工业机器人,其特征在于:所述连接板(22)顶端固接有第二限位杆(18),所述第二限位杆(18)顶端伸入所述第二壳体(17)内,所述第二限位杆(18)上滑动套设有滑套(19),所述滑套(19)固接在所述第二壳体(17)内,所述第二限位杆(18)上套设有第一弹簧(21),所述第一弹簧(21)位于所述第二壳体(17)和所述连接板(22)之间,所述第一弹簧(21)两端分别与所述连接板(22)和所述第二壳体(17)固接。
8.根据权利要求1所述的一种搬运式工业机器人,其特征在于:所述夹持驱动部包括第二双向丝杠(10),所述第二双向丝杠(10)转动贯穿所述第一壳体(8),所述第二双向丝杠(10)与所述梁体(5)垂直设置,所述第二双向丝杠(10)两侧对称设置有第一限位杆(11),所述第一限位杆(11)固定贯穿所述第一壳体(8),所述第一限位杆(11)两端均固接有限位板,所述第二双向丝杠(10)末端与所述限位板转动连接,所述安装块(12)顶部螺纹套设在所述第二双向丝杠(10)上,且所述第一限位杆(11)滑动贯穿所述安装块(12),所述第一壳体(8)外壁固接有第二电机(33),所述第一壳体(8)内设置有第一齿轮(9)和第二齿轮(40),所述第一齿轮(9)与所述第二电机(33)的输出轴同轴固接,所述第二齿轮(40)固定套设在所述第二双向丝杠(10)上,所述第一齿轮(9)与所述第二齿轮(40)相啮合。
9.根据权利要求1所述的一种搬运式工业机器人,其特征在于:所述调节驱动部包括第一双向丝杠(6),所述梁体(5)远离所述连接法兰(3)的一侧开设有滑槽,所述第一双向丝杠(6)转动连接在所述滑槽内,所述第一双向丝杠(6)上对称螺接有两滑块(7),两所述滑块(7)均与所述滑槽滑接,两所述第一壳体(8)分别与两所述滑块(7)固接,所述梁体(5)一侧固接有第一电机(4),所述第一电机(4)的输出轴与所述第一双向丝杠(6)同轴固接。
技术总结
本发明公开一种搬运式工业机器人,包括:机械臂,机械臂末端固接有连接法兰;调节机构,调节机构包括梁体,梁体固接在连接法兰远离机械臂的一侧,梁体上安装有调节驱动部;夹持机构,夹持机构包括第一壳体,第一壳体设置有两个,两第一壳体均位于梁体远离连接法兰的一侧,两第一壳体均与调节驱动部固接,两第一壳体上均安装有夹持驱动部,两第一壳体的两侧均设置有安装块,安装块与夹持驱动部连接,安装块上安装有第一夹紧组件和第二夹紧组件;吸附机构,吸附机构包括真空泵和吸盘部,真空泵固接在梁体上,第一壳体远离梁体的一侧固接有若干吸盘部,若干吸盘部均与真空泵连通。本发明实现了可变形的夹持结构,使得本发明具有更好的通用性。
技术研发人员:韩京海,何叶,张蒙蒙
受保护的技术使用者:南京交通职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!