一种用于玻璃基板垂直搬运的工装载具的制作方法
本发明属于工装载具,具体为一种用于玻璃基板垂直搬运的工装载具。
背景技术:
1、目前,国内液晶基板行业蓬勃发展,以液晶面板的生产制造效率、自动化程度越来越高,所以对液晶基板的需求也是日益增长。前期基板行业都被国外企业垄断,近年来国内的基板生产也已经展开,国内的设备需求也在增加,其中玻璃基板的搬运也成为了一个国内需要解决的问题。
2、现有技术中的在在溢流法的基板生产中玻璃是需要垂直进行搬运,为了解决玻璃需要垂直搬运这一需求,故提出一种用于玻璃基板垂直搬运的工装载具。
技术实现思路
1、本发明的目的在于:为了实现对玻璃基板进行垂直搬运。
2、本发明采用的技术方案如下:一种用于玻璃基板垂直搬运的工装载具,包括机座板,所述机座板上表面固定安装有多个夹爪,所述夹爪通过气缸驱动,所述机座板左右两侧均旋转连接有四角导轮,所述机座板中部下端旋转连接有中间导轮,所述机座板底部固定安装有定位导向。
3、通过上述技术方案,玻璃基板从溢流炉里流出的期间,基板工装载具已经在输送线的上料工位进行定位等待,并且开抓气缸执行运动推开夹爪,当基板玻璃完全流出后,机器人手臂会把基板玻璃放入夹爪设定位置,放好后夹爪气缸缩回夹爪闭合夹住基板玻璃,当机器人手臂返回后基板工装载具开始在输送线上移动,其中为了防止载具在输送线上产生滑动摩擦,载具四周装有四角导轮和中间导轮,保证了载具在输送线上顺畅的运行。
4、在一优选的实施方式中,所述机座板上表面固定安装有两个人工把手和两个定位吊口。
5、通过上述技术方案,部分输送线之间需要天车调运,天车手臂可与载具的定位吊口连接进行调运,当需要人工操作载具时,可通过人工把手进行搬运操作。
6、在一优选的实施方式中,所述夹爪的夹持端固定安装有耐高温夹块。
7、通过上述技术方案,由于基板玻璃的温度很高,此时在夹爪与玻璃基板之间靠耐高温夹块作为中介物。
8、在一优选的实施方式中,所述机座板右侧外壁固定安装有缓冲块,所述机座板左侧外壁固定安装有缓冲器。
9、通过上述技术方案,载具与载具之间意外发生碰撞时,载具首末两段分别装有缓冲器和缓冲块进行保护。
10、在一优选的实施方式中,所述机座板底部固定安装有靴条。
11、综上所述,由于采用了上述技术方案,本发明的有益效果是:本发明提出一种用于玻璃基板垂直搬运的工装载具,为了实现对玻璃基板进行垂直搬运。
12、1、本发明中,玻璃基板从溢流炉里流出的期间,基板工装载具已经在输送线的上料工位进行定位等待,并且开抓气缸执行运动推开夹爪,当基板玻璃完全流出后,机器人手臂会把基板玻璃放入夹爪设定位置,放好后夹爪气缸缩回夹爪闭合夹住基板玻璃,当机器人手臂返回后基板工装载具开始在输送线上移动,从而实现玻璃基板垂直搬运。
13、2、本发明中,为了防止载具在输送线上产生滑动摩擦,载具四周装有四角导轮和中间导轮,保证了载具在输送线上顺畅的运行。
14、3、载具与载具之间意外发生碰撞时,载具首末两段分别装有缓冲器和缓冲块进行保护。
技术特征:
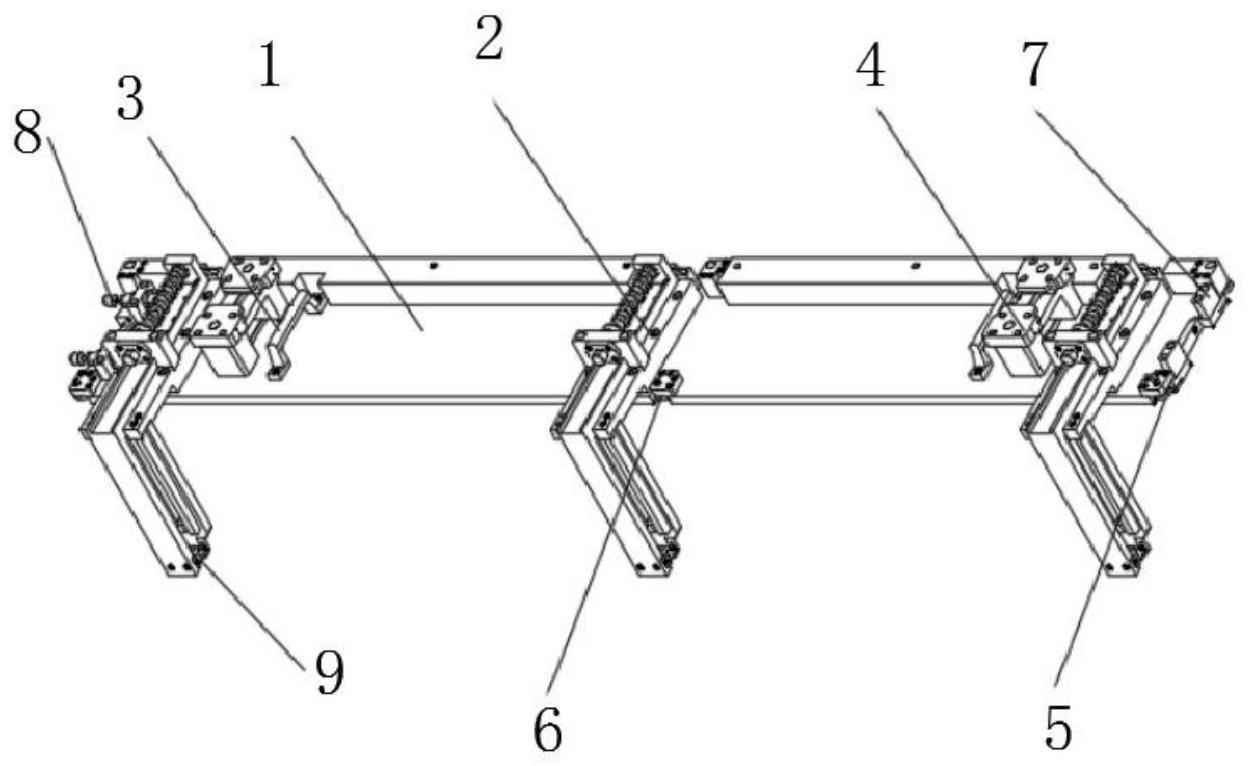
1.一种用于玻璃基板垂直搬运的工装载具,包括机座板(1),其特征在于:所述机座板(1)上表面固定安装有多个夹爪(2),所述夹爪(2)通过气缸驱动,所述机座板(1)左右两侧均旋转连接有四角导轮(5),所述机座板(1)中部下端旋转连接有中间导轮(6),所述机座板(1)底部固定安装有定位导向(10)。
2.如权利要求1所述的一种用于玻璃基板垂直搬运的工装载具,其特征在于:所述机座板(1)上表面固定安装有两个人工把手(3)和两个定位吊口(4)。
3.如权利要求1所述的一种用于玻璃基板垂直搬运的工装载具,其特征在于:所述夹爪(2)的夹持端固定安装有耐高温夹块(9)。
4.如权利要求1所述的一种用于玻璃基板垂直搬运的工装载具,其特征在于:所述机座板(1)右侧外壁固定安装有缓冲块(7),所述机座板(1)左侧外壁固定安装有缓冲器(8)。
5.如权利要求1所述的一种用于玻璃基板垂直搬运的工装载具,其特征在于:所述机座板(1)底部固定安装有靴条。
技术总结
本发明属于工装载具技术领域,公开了一种用于玻璃基板垂直搬运的工装载具,包括机座板,所述机座板上表面固定安装有多个夹爪,所述夹爪通过气缸驱动,所述机座板左右两侧均旋转连接有四角导轮,所述机座板中部下端旋转连接有中间导轮,所述机座板底部固定安装定位导向,所述机座板上表面固定安装有人工把手和定位吊口,所述夹爪的夹持端固定安装有耐高温夹块,本发明提出一种用于玻璃基板垂直搬运的工装载具,通过开抓气缸执行运动推开夹爪,当基板玻璃完全流出后,机器人手臂会把基板玻璃放入夹爪设定位置,放好后夹爪气缸缩回夹爪闭合夹住基板玻璃,当机器人手臂返回后基板工装载具开始在输送线上移动,从而实现玻璃基板垂直搬运。
技术研发人员:周哲
受保护的技术使用者:合肥通彩自动化设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!