一种气浮平台牵引的控制方法
本发明涉及到气浮平台,特别是一种气浮平台牵引的控制方法。
背景技术:
1、气浮平台有气浮直线平台与气浮(旋转)转台两类。气浮平台的核心原理是由空气轴承结合电控元件构成的精密位移平台,基于空气轴承的原理,让负载板浮在气浮导轨或气浮轴承上,实现无摩擦、无振动的平滑运动。气浮平台具有精确运动、定位精度高、效率高等特点,因此近些年在精密输送领域得到了较好的运用。
2、传统的气浮平台在运用于输送时,利用空气轴承的原理,通过位于物件下方的平台供气使平台与物件之间形成气膜,利用斜向喷流生成水平气流牵引拖曳的方式驱动物件运动,如“一种气悬浮传送装置”(申请公布号为cn102363476b)、“一种无接触倾角可控式输运平台及控制方法”(申请公布号为cn111252558b),该类气浮平台通常具有固定的输送轨道,占用场地大,机动性差等问题。
技术实现思路
1、本发明提供一种气浮平台牵引的控制方法,目的在于解决传统的气浮平台在使用时,需要通过固定的输送轨道进行引导,占用场地大,机动性差的问题。
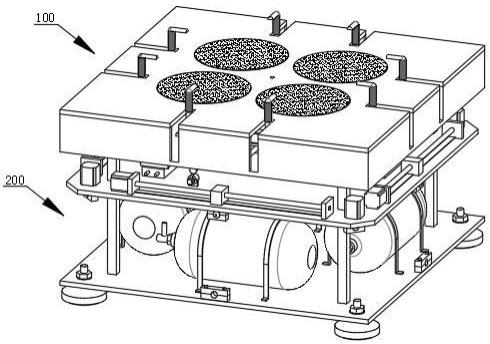
2、本发明所采用的技术方案是:一种气浮平台牵引的控制方法,所述气浮平台由承载平台及移动平台组成;
3、其中,所述移动平台包括底板以及与所述底板固定连接的顶板,所述底板上安装有高压气罐、气浮脚座,所述顶板上设有电源、减压阀、电磁阀、控制器、信号收发器、水平仪、驱动气嘴以及调平装置;
4、所述驱动气嘴包括推进气嘴、姿态调整气嘴,所述推进气嘴固定于所述顶板的边缘,所述顶板的边角处安装有步进电机,所述步进电机的输出端安装有转板,所述姿态调整气嘴固定在所述转板上;
5、其中,所述承载平台包括与所述顶板固定连接的承载箱,所述承载箱下端设有光纤陀螺仪,所述承载箱的顶端设有承载板,所述承载板上设有物料感应器,所述承载箱内设有驱动机构以及与所述驱动机构连接的限位机构;
6、所述牵引的控制方法包括如下步骤:
7、s1)外部设备将物料放置在所述承载板上,所述物料感应器接收到上料信号,所述控制器向所述驱动机构发送执行指令,所述驱动机构驱动所述限位机构向所述承载板上的物料移动,将物料推送至所述承载板上的指定位置,完成物料上料的牵引动作;
8、s2)所述控制器接收到悬浮指令后指令电磁阀开启,所述气浮脚座启动,使得气浮平台整体处于悬浮姿态,所述水平仪与所述调平装置配合使得气浮平台保持水平姿态;
9、s3)所述控制器接收到转移指令后指令电磁阀开启,所述推进气嘴与所述姿态调整气嘴启动,所述推进气嘴与所述光纤陀螺仪配合,推动所述气浮平台朝向目标位置移动,所述姿态调整气嘴用于调整所述气浮平台的旋转姿态,并配合所述推进气嘴推动所述气浮平台朝向目标位置移动,同时,所述水平仪与所述调平装置配合使得气浮平台保持动态水平,直至所述气浮平台达到目标位置,完成气浮平台的移动牵引动作。
10、优选的,所述承载板上设有若干贯穿的腔体,所述腔体内固定有多孔陶瓷板,所述多孔陶瓷板底部设有气罩。
11、优选的,所述调平装置包括伺服电机、支架、导向座,所述支架设有两个,所述支架之间转动连接有丝杆,所述导向座位于所述丝杆的下方,所述丝杆上螺纹连接有配重块,所述配重块与所述导向座滑动连接。
12、优选的,所述驱动机构包括第一驱动单元以及于所述第一驱动单元垂直设置的第二驱动单元,所述第一驱动单元与所述第二驱动单元上下交叉设置且结构相同。
13、优选的,所述第一驱动单元包括第一伺服电机、第一双向丝杠、第一导向轴及第一安装座,所述第一安装座设于所述第一双向丝杠的两端并与所述第一双向丝杠转动连接,所述第一双向丝杠上螺纹连接有滑座,所述滑座与所述第一导向轴滑动连接,所述第一伺服电机与所述第一双向丝杠连接并驱动所述第一双向丝杠转动,所述限位机构安装于所述滑座上。
14、可选的,所述限位机构包括固定在滑座上的矫正杆,所述承载板上设有与所述矫正杆相匹配的导向槽
15、可选的,所述限位机构包括旋转气缸,所述转气缸的输出端设有矫正杆,所述承载箱与所述承载板上设有与所述矫正杆相匹配的导向槽。
16、优选的,所述矫正杆的顶端设有限位杆,所述限位杆与所述矫正杆垂直。
17、优选的,所述底板上至少设有一个连接座,所述连接座可通过连杆将两个所述气浮平台固定连接。
18、本发明的有益效果是:
19、1、本发明提供的一种气浮平台整体结构简单,通过承载平台上设置的限位机构,能够对承载板上的物料限位和矫直,实现对物料的牵引定位,精度高;通过移动平台通过推进气嘴与姿态调整气嘴的配合,对移动平台进行牵引和姿态调整,使其始终保持目标姿态,无需安装固定输送轨道,占用场地小,机动性强。
20、2、本发明提供的一种气浮平台牵引的控制方法,能够控制平台对物料的牵引动作以及对平台整体的牵引动作,精度高,自动化程度高,在物料转移领域具有较好的运用前景。
技术特征:
1.一种气浮平台牵引的控制方法,其特征在于,所述气浮平台由承载平台(100)及移动平台(200)组成;
2.根据权利要求1所述的一种气浮平台牵引的控制方法,其特征在于,所述承载板(120)上设有若干贯穿的腔体,所述腔体内固定有多孔陶瓷板(121),所述多孔陶瓷板(121)底部设有气罩(122)。
3.根据权利要求1所述的一种气浮平台牵引的控制方法,其特征在于,所述调平装置(240)包括伺服电机(241)、支架(242)、导向座(243),所述支架(242)设有两个,所述支架(242)之间转动连接有丝杆(244),所述导向座(243)位于所述丝杆(244)的下方,所述丝杆(244)上螺纹连接有配重块(245),所述配重块(245)与所述导向座(243)滑动连接。
4.根据权利要求1-3任一项所述的一种气浮平台牵引的控制方法,其特征在于,所述驱动机构(150)包括第一驱动单元以及于所述第一驱动单元垂直设置的第二驱动单元,所述第一驱动单元与所述第二驱动单元上下交叉设置且结构相同。
5.根据权利要求4所述的一种气浮平台牵引的控制方法,其特征在于,所述第一驱动单元包括第一伺服电机(151)、第一双向丝杠(152)、第一导向轴(153)及第一安装座(154),所述第一安装座(154)设于所述第一双向丝杠(152)的两端并与所述第一双向丝杠(152)转动连接,所述第一双向丝杠(152)上螺纹连接有滑座(155),所述滑座(155)与所述第一导向轴(153)滑动连接,所述第一伺服电机(151)与所述第一双向丝杠(152)连接并驱动所述第一双向丝杠(152)转动,所述限位机构(160)安装于所述滑座(155)上。
6.根据权利要求5所述的一种气浮平台牵引的控制方法,其特征在于,所述限位机构(160)包括固定在滑座(155)上的矫正杆(162),所述承载板(120)上设有与所述矫正杆(162)相匹配的导向槽(163)。
7.根据权利要求5所述的一种气浮平台牵引的控制方法,其特征在于,所述限位机构(160)包括旋转气缸(161),所述转气缸的输出端设有矫正杆(162),所述承载箱(110)与所述承载板(120)上设有与所述矫正杆(162)相匹配的导向槽(163)。
8.根据权利要求7所述的一种气浮平台牵引的控制方法,其特征在于,所述矫正杆(162)的顶端设有限位杆(164),所述限位杆(164)与所述矫正杆(162)垂直。
9.根据权利要求7所述的一种气浮平台牵引的控制方法,其特征在于,所述底板(220)上至少设有一个连接座(250),所述连接座(250)可通过连杆将两个所述气浮平台固定连接。
技术总结
本发明提供了一种气浮平台牵引的控制方法,涉及到气浮平台技术领域。该气浮平台牵引的控制方法,气浮平台由承载平台及移动平台组成;移动平台包括底板、顶板,底板上安装有高压气罐、气浮脚座,顶板上设有电源、减压阀、电磁阀、控制器、信号收发器、水平仪、驱动气嘴以及调平装置;承载平台包括与顶板固定连接的承载箱,承载箱下端设有光纤陀螺仪,承载箱的顶端设有承载板,承载板上设有物料感应器,承载箱内设有驱动机构以及与驱动机构连接的限位机构。通过控制系统控制驱动机构以及限位机构,实现对物料的牵引定位;通过推进气嘴与姿态调整气嘴的配合,对移动平台进行牵引和姿态调整,无需安装固定输送轨道,占用场地小,机动性强。
技术研发人员:夏嘉伟,穆子晨,王璐,吴彤,宗莹,聂祥钰,郑毅,杜建周
受保护的技术使用者:盐城工学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!