一种刀片握把夹子收料机的制作方法
本发明涉及刀片生产领域,尤其涉及一种刀片握把夹子收料机。
背景技术:
1、在生产刀片握把夹子时,通过模具裁折后的刀片握把夹子,需要进行收纳整理,传统的整理方式可为人工对从模具上自由散落的刀片握把夹子进行整理叠放;或者采用轨道对刀片握把夹子进行接收,以使得刀片握把夹子整排整齐挤出,而后通过人工手动将轨道上的刀片握把夹子取放至收纳框内。
2、但是传统的刀片握把夹子收纳方式均需要人工手动进行,容易将手上的汗液粘到刀片握把夹子上,造成刀片握把夹子被腐蚀生锈。
技术实现思路
1、本发明的目的在于提供一种刀片握把夹子收料机,用以解决传统的刀片握把夹子整理过程中,采用人工手动整理的方式存在汗液粘到刀片握把夹子上,导致刀片握把夹子被腐蚀生锈的技术问题。
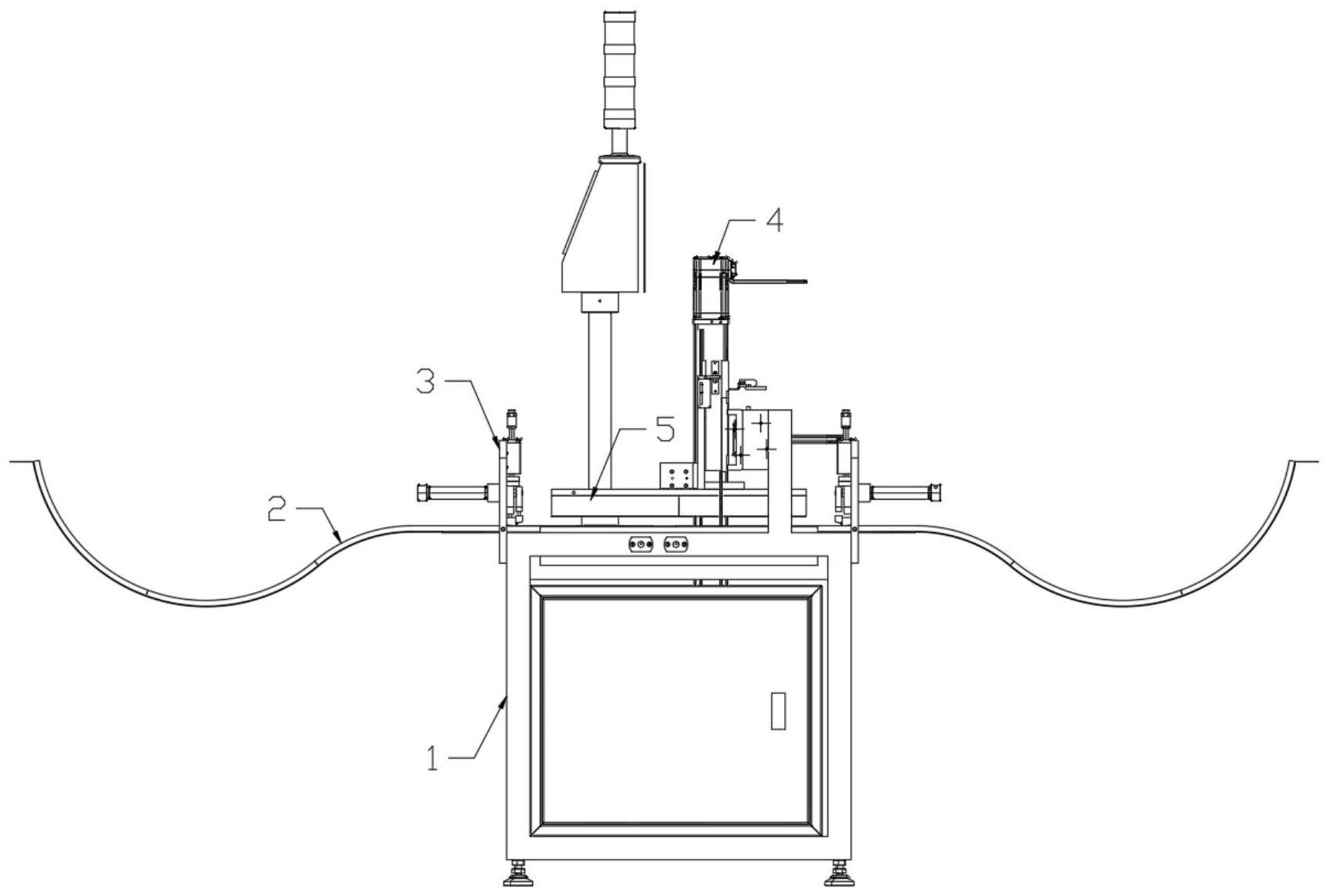
2、为实现上述目的,本发明采用的技术方案是:提供一种刀片握把夹子收料机,所述刀片握把夹子收料机包括:
3、机架,所述机架的顶部设置有收料盘;
4、收夹轨道,所述收夹轨道一端设置在所述机架上,所述收夹轨道用于将待进行收料的刀片握把夹子输送至机架的收料位置;
5、夹子自动分离部,所述夹子自动分离部设置于所述机架上,所述夹子自动分离部用于将所述收夹轨道内的相互堆叠的所述刀片握把夹子,按照特定数量进行拆分,以限制每次进入到收料位置的所述刀片握把夹子的数量;
6、自动收夹垛码部,所述自动收夹垛码部设置于所述机架上;
7、无磁化夹子拾取部,所述无磁化夹子拾取部设置于所述自动收夹垛码部上,所述无磁化夹子拾取部与所述自动收夹垛码部将所述刀片握把夹子拾取运送至所述收料盘内进行收纳。
8、在一个实施例中,所述夹子自动分离部包括:
9、龙门安装架,所述龙门安装架设置于所述机架上,所述收夹轨道穿过所述龙门安装架的下方通道;
10、第一气缸,所述第一气缸设置于所述龙门安装架上,所述第一气缸的活塞杆伸缩方向垂直于下方的所述收夹轨道的运输方向;
11、下压板,所述下压板固定于所述第一气缸的活塞杆上;
12、第一分离杆,所述第一分离杆顶部设置于所述下压板上,所述第一分离杆底部设置有滑槽;
13、第一分离块,所述第一分离块顶部滑动配合于所述第一分离杆的滑槽内,所述第一分离块与所述第一分离杆之间设置有第一弹性件;
14、第二气缸,所述第二气缸滑动设置于所述龙门安装架上,且所述第二气缸的滑动方向与所述第一气缸的活塞杆伸缩方向平行,所述第二气缸的活塞杆伸缩方向平行于下方所述收夹轨道的运输方向,所述第二气缸与所述龙门安装架之间设置有第二弹性件;
15、第二分离杆,所述第二分离杆设置于所述第二气缸的活塞杆上,所述第二分离杆的顶部与所述下压板之间存在间距;
16、第二分离块,所述第二设置于所述第二分离杆的底部,所述第二分离块紧贴所述第一离块;
17、激光计数器,所述激光计数器设置于所述龙门安装架上,所述激光计数器用于记录所述收夹轨道上穿过所述龙门安装架的刀片握把夹子的数量。
18、在一个实施例中,所述第一分离块的底面与刀片握把夹子的背面平行,所述第二分离块的底面与刀片握把夹子的顶面平行。
19、在一个实施例中,所述收夹轨道包括设置于底部的输送带以及设置于输送带两侧的挡板。
20、在一个实施例中,所述自动收夹垛码部包括:
21、x轴运动机构,所述x轴运动机构设置于所述机架上,所述x轴运动机构包括滑动设置于所述机架上的x轴运动平台,以及驱动所述x轴运动平台进行运动的x轴驱动部;
22、z轴运动机构,所述z轴运动机构设置于所述x轴运动平台上,所述z轴运动机构包括滑动设置于所述x轴运动平台上的z轴运动平台,以及驱动所述z轴运动平台上下运动的z轴驱动部;
23、所述无磁化夹子拾取部设置于所述z轴运动平台上。
24、在一个实施例中,所述无磁化夹子拾取部包括:
25、横梁,所述横梁固定于所述自动收夹垛码部上,所述横梁的两侧设置有滑动槽,所述滑动槽的开设方向沿着所述收夹轨道长度方向;
26、两根夹持拾取臂,两根所述夹持拾取臂的顶部分别滑动设置在所述横梁的所述滑动槽内;
27、第一夹块,所述第一夹块设置于一根所述夹持拾取臂上,所述第一夹块的夹持面与刀片握把夹子的内侧面形状一致;
28、第二夹块,所述第二夹块设置于另一根所述夹持拾取臂上,所述第二夹块的夹持面与刀片握把夹子的外侧面形状一致;
29、丝杆,所述丝杆可转动设置于所述横梁上,所述丝杆两侧设置有螺向相反的螺纹,所述第一夹块与所述第二夹块分别配合在所述丝杆的左右两侧的螺纹上;
30、夹持动力部,所述夹持动力部设置于所述横梁上,所述夹持动力部的动力输出端与所述丝杆相连。
31、在一个实施例中,所述第一夹块与所述第二夹块的夹持面上均设置有弹性层。
32、在一个实施例中,所述无磁化夹子拾取部还包括辅助夹取部,所述辅助夹取部包括吸附块、真空管,所述吸附块的底部设置有锯齿状的凹槽,所述凹槽与堆叠的刀片握把夹子顶部贴合;所述吸附块内设置有真空通道,所述真空通道一端与所述凹槽相连通,所述真空通道的另一端与所述真空管相连通,所述真空管的另一端连接真空泵。
33、在一个实施例中,所述辅助夹取部还包括反馈器,所述反馈器设置于所述真空管上,所述反馈器与所述夹持动力部电性连接,所述反馈器实时监测所述真空管的真空度并根据真空度控制所述夹持动力部运转。
34、在一个实施例中,所述刀片握把夹子收料机包括两条所述收夹轨道,两条所述收夹轨道分别设置于所述机架的两侧。
35、本发明实施例中上述的一个或多个技术方案,至少具有如下技术效果或优点:
36、本发明实施例提供的刀片握把夹子收料机,通过采用收夹轨道将待进行收料的刀片握把夹子输送至机架的收料位置,并利用夹子自动分离部将收夹轨道内的相互堆叠刀片握把夹子按照特定数量进行拆分,以便于无磁化夹子拾取部对刀片握把夹子进行拾取搬运。拆分后的刀片握把夹子继续在收夹轨道运动直至到达收料位置后,自动收夹垛码部控制无磁化夹子拾取部对刀片握把夹子进行拾取,而后自动收夹垛码部控制无磁化夹子拾取部运动至收料盘上方,最后无磁化夹子拾取部松开刀片握把夹子,使得刀片握把夹子被规整收纳至收料盘内。本发明实施例提供的刀片握把夹子收料机,整个收纳过程中全自动,无需人工手动接触刀片握把夹子,避免手上汗液粘连在刀片握把夹子上而导致其生锈腐蚀。并且采用全自动的整理叠放的方式相较于人工而言,具有更高的效率,降低了人工成本。
技术特征:
1.一种刀片握把夹子收料机,其特征在于,所述刀片握把夹子收料机包括:
2.根据权利要求1所述的一种刀片握把夹子收料机,其特征在于,所述夹子自动分离部包括:
3.根据权利要求2所述的一种刀片握把夹子收料机,其特征在于:
4.根据权利要求1所述的一种刀片握把夹子收料机,其特征在于:
5.根据权利要求1所述的一种刀片握把夹子收料机,其特征在于,所述自动收夹垛码部包括:
6.根据权利要求1所述的一种刀片握把夹子收料机,其特征在于,所述无磁化夹子拾取部包括:
7.根据权利要求6所述的一种刀片握把夹子收料机,其特征在于,
8.根据权利要求6所述的一种刀片握把夹子收料机,其特征在于:
9.根据权利要求8所述的一种刀片握把夹子收料机,其特征在于:
10.根据权利要求1所述的一种刀片握把夹子收料机,其特征在于:
技术总结
本申请提供了一种刀片握把夹子收料机,包括无磁化夹子拾取部、收夹轨道、夹子自动分离部、自动收夹垛码部、机架。其中,机架的顶部设置有收料盘。收夹轨道一端设置在机架上,收夹轨道用于将待进行收料的刀片握把夹子输送至机架的收料位置。夹子自动分离部设置于机架上,夹子自动分离部用于将收夹轨道内的相互堆叠的刀片握把夹子,按照特定数量进行拆分,以限制每次进入到收料位置的刀片握把夹子的数量。自动收夹垛码部设置于机架上。无磁化夹子拾取部设置于自动收夹垛码部上,无磁化夹子拾取部与自动收夹垛码部将刀片握把夹子拾取运送至收料盘内进行收纳。本申请提供的刀片握把夹子收料机,全自动收纳刀片握把夹子,无需人工手动。
技术研发人员:晏才敏,何艳峰,温小群,陈建红
受保护的技术使用者:江西犀瑞制造有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!