一种吨包袋自动取袋、开袋、上袋装置的制作方法
本发明涉及吨包袋配送装置领域,具体是一种吨包袋自动取袋、开袋、上袋装置。
背景技术:
1、吨袋包装是医药、食品、化工、建材、环保、新材料领域散装物料处理的重要工序。目前在利用吨包袋对物料进行包装时,需要人工取袋、开袋、上袋,费时费力,大大的降低了生产效率,增加了人工成本,而现有的袋库取袋、开袋、上袋装置都是半自动化机器或者人工取袋、开袋上袋工作,工作效率低,难以满足生产需求。
技术实现思路
1、本发明提供了一种吨包袋自动取袋、开袋、上袋装置,以解决现有吨包袋需要人工取袋、开袋、上袋的问题。
2、为了达到上述目的,本发明所采用的技术方案为:
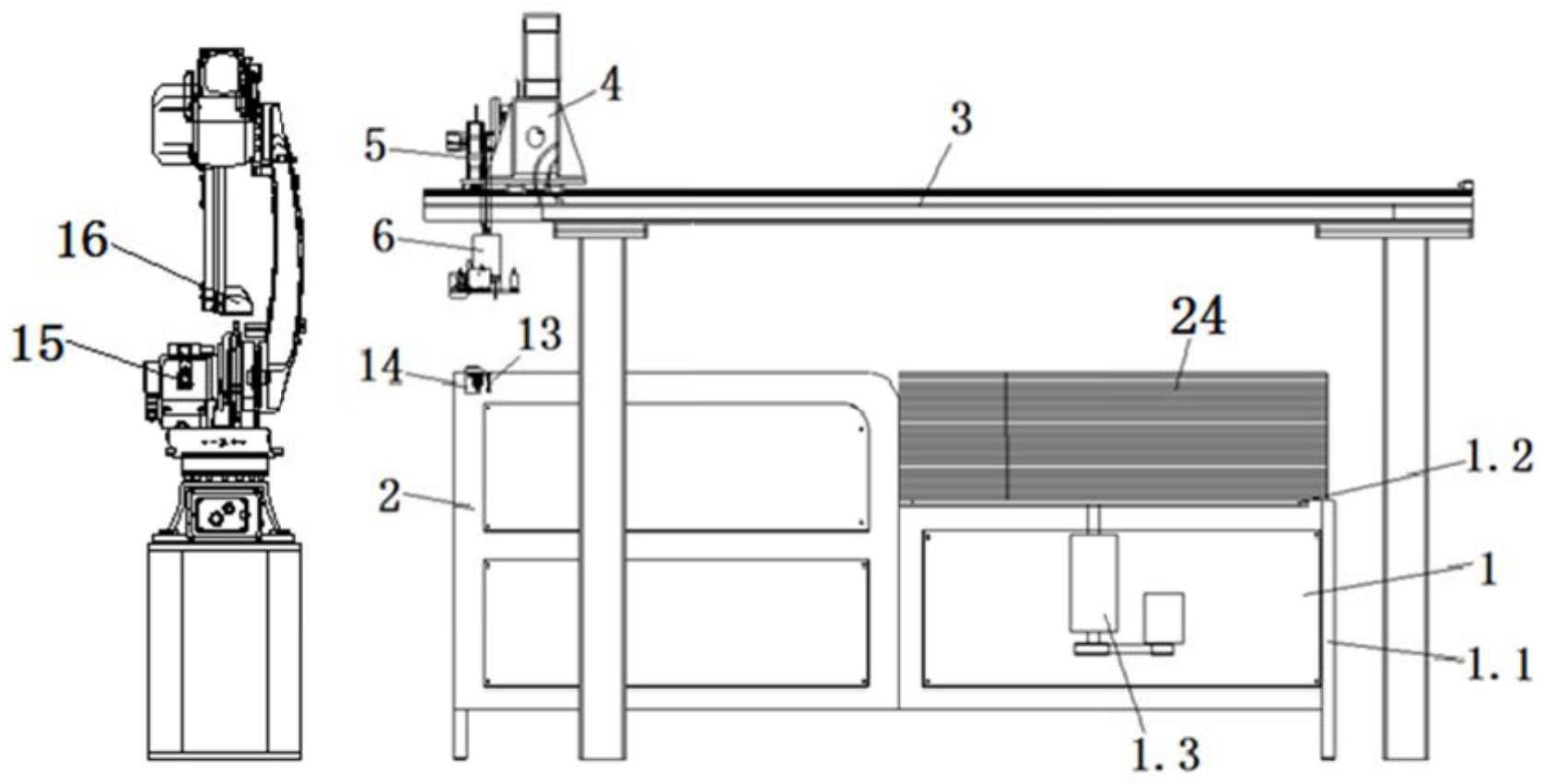
3、一种吨包袋自动取袋、开袋、上袋装置,包括取袋开袋工位,取袋开袋工位包括升降式袋库,升降式袋库的x向一侧并排设置有上袋平台,升降式袋库、上袋平台整体上方架设有龙门架,龙门架上移动安装有移动装置,所述移动装置沿x向移动,移动装置下方连接有可升降的固定架,固定架底面安装有上锁袋机构,所述上袋平台上安装有下锁袋机构,上锁袋机构包括通过水平转轴转动连接于固定架底部的锁袋夹爪、通过水平转轴转动连接于固定架底部的上锁袋扣板,以及固定于固定架底部的上固定吸盘,所述下锁袋机构包括固定于上袋平台上的下固定吸盘,以及通过水平转轴转动安装于上袋平台上的下锁袋扣板,由移动装置带动固定架移动至升降式袋库,并通过上锁袋机构从升降式袋库中取走吨包袋,并由移动装置将吨包袋转移至上袋平台后,通过上锁袋机构、下锁袋机构配合实现打开吨包袋的袋口;
4、还包括上袋工位,上袋工位包括机器人以及连接于机器人的机械臂的上袋装置,机器人设于升降式袋库的x向另一侧,所述上袋装置包括连接于机械臂臂端的固定座,固定座两对称侧分别设有夹爪组件,所述夹爪组件包括固定于固定座对应侧的固定夹爪,以及与固定夹爪呈交叉错开的旋转夹爪,每侧的旋转夹爪一端通过转轴转动连接于固定座,每侧的旋转夹爪另一端与对应侧固定夹爪之间夹口形成爪口,所述固定座中设有转动驱动机构,由转动驱动机构驱动每侧旋转夹爪以所述转轴为支点转动;由机器人的机械臂将上袋装置移送至吨包袋打开的袋口,通过上袋装置夹取袋口侧边后,再由机器人通过上袋装置将吨包袋取走后进行上袋。
5、进一步的,所述取袋开袋工位有多个,所述上袋工位还包括电控轨道,所述机器人安装于电控轨道上,通过电控轨道使机器人切换移动至不同的取袋开袋工位。
6、进一步的,所述取袋开袋工位中,升降式袋库为丝杆升降平台。
7、进一步的,所述取袋开袋工位中,移动装置还沿y向移动。
8、进一步的,所述取袋开袋工位中,所述锁袋夹爪包括弯爪,弯爪通过水平转轴转动连接于对应位置。
9、进一步的,所述取袋开袋工位中,所述上锁袋扣板、下锁袋扣板结构相同,均包括钩板,钩板通过水平转轴转动连接于对应位置。
10、进一步的,所述上袋工位的上袋装置中,转动驱动机构驱动通过两个连接杆一一对应与两侧旋转夹爪连接,由转动驱动机构通过连接杆驱动两侧的旋转夹爪同步转动。
11、进一步的,所述上袋工位的上袋装置中,转动驱动机构驱动包括固定于固定座的双行程气缸,两连接杆各自一端分别铰接于双行程气缸的活塞杆杆端,两连接杆各自另一端一一对应铰接于两侧的旋转夹爪。
12、进一步的,所述上袋工位的上袋装置中,每侧的旋转夹爪用于形成夹口的另一端分别安装有光电接近开关。
13、本发明的取袋开袋工位中,龙门架上移动装置在升降式袋库、上袋平台之间运动,通过上锁袋机构和上袋平台上的下锁袋机构配合,实现自动化取袋、开袋。上袋工位中,通过机器人的机械臂将上袋装置送入吨包袋打开后的袋口中,由每侧的固定夹爪和旋转夹爪配合抓取对应侧袋口侧边,并实现自动夹紧取袋和松开上袋过程。整个取袋、开袋、上袋过程无须人工参与,解决了人工上袋费时费力、效率低的问题,节约了人工成本。
技术特征:
1.一种吨包袋自动取袋、开袋、上袋装置,其特征在于,包括取袋开袋工位,取袋开袋工位包括升降式袋库,升降式袋库的x向一侧并排设置有上袋平台,升降式袋库、上袋平台整体上方架设有龙门架,龙门架上移动安装有移动装置,所述移动装置沿x向移动,移动装置下方连接有可升降的固定架,固定架底面安装有上锁袋机构,所述上袋平台上安装有下锁袋机构,上锁袋机构包括通过水平转轴转动连接于固定架底部的锁袋夹爪、通过水平转轴转动连接于固定架底部的上锁袋扣板,以及固定于固定架底部的上固定吸盘,所述下锁袋机构包括固定于上袋平台上的下固定吸盘,以及通过水平转轴转动安装于上袋平台上的下锁袋扣板,由移动装置带动固定架移动至升降式袋库,并通过上锁袋机构从升降式袋库中取走吨包袋,并由移动装置将吨包袋转移至上袋平台后,通过上锁袋机构、下锁袋机构配合实现打开吨包袋的袋口;
2.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述取袋开袋工位有多个,所述上袋工位还包括电控轨道,所述机器人安装于电控轨道上,通过电控轨道使机器人切换移动至不同的取袋开袋工位。
3.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述取袋开袋工位中,升降式袋库为丝杆升降平台。
4.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述取袋开袋工位中,移动装置还沿y向移动。
5.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述取袋开袋工位中,所述锁袋夹爪包括弯爪,弯爪通过水平转轴转动连接于对应位置。
6.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述取袋开袋工位中,所述上锁袋扣板、下锁袋扣板结构相同,均包括钩板,钩板通过水平转轴转动连接于对应位置。
7.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述上袋工位的上袋装置中,转动驱动机构驱动通过两个连接杆一一对应与两侧旋转夹爪连接,由转动驱动机构通过连接杆驱动两侧的旋转夹爪同步转动。
8.根据权利要求7所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述上袋工位的上袋装置中,转动驱动机构驱动包括固定于固定座的双行程气缸,两连接杆各自一端分别铰接于双行程气缸的活塞杆杆端,两连接杆各自另一端一一对应铰接于两侧的旋转夹爪。
9.根据权利要求1所述的一种吨包袋自动取袋、开袋、上袋装置,其特征在于,所述上袋工位的上袋装置中,每侧的旋转夹爪用于形成夹口的另一端分别安装有光电接近开关。
技术总结
本发明公开了一种吨包袋自动取袋、开袋、上袋装置,包括取袋开袋工位、上袋工位,取袋开袋工位包括升降式袋库、上袋平台,升降式袋库、上袋平台整体上方架设有龙门架,龙门架上移动装置连接有可升降的固定架,固定架底面安装有上锁袋机构,上袋平台上安装有下锁袋机构;上袋工位包括机器人以及连接于机器人的机械臂的上袋装置,机器人设于升降式袋库的X向另一侧。本发明整个取袋、开袋、上袋过程无须人工参与,解决了人工上袋费时费力、效率低的问题,节约了人工成本。
技术研发人员:张明,吕长根,张金龙
受保护的技术使用者:合肥伟特机电装备制造有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!