一种基于变摆长摆动的快速消能系统的制作方法
本发明涉及设备坠落防护技术,具体涉及用于坠落防护的摆动消能技术。
背景技术:
1、爬壁机器人通过搭载钢筋扫描仪、弹性波检测仪、雷达等仪器,以负压吸附、磁吸附等方式贴近构筑物表面进行检测。目前,爬壁机器人能够在隧道弧形结构面、建筑物垂直墙面、桥墩、桥梁底板、建筑物楼板等构筑物进行贴壁检测。
2、其中,隧道爬壁机器人无损检测是目前发展一个趋势。如爬壁式弹性波机器人能够在隧道结构面进行隧道二衬浇筑的混凝土厚度、缺陷等检测。隧道结构一般为圆弧形,爬壁机器人沿着圆弧形进行爬行检测,为保证爬壁机器人的安全性,现有爬壁机器人上都设置有相应的安全措施。
3、常规机器人安全措施为在隧道顶部挂安全绳,防止爬壁机器人突发事故坠落。但隧道顶部结构一般无法打孔及单独设置挂点,因此机器人工作安全风险较大;另一方面,即使隧道上能够设置挂点,爬壁机器人一但坠落,会围绕隧道上方挂点进行摆动,摆动幅度较大,往往会造成次生事故,如设备摆动过程中撞击其它设备或人员;另外自跟随小车,在机器人进行拱腰检测时,无法进行有效防护。因此,常规防护办法不能有效解决圆弧形结构检测的技术难题。
4、再者,爬壁机器人在高桥墩、桥梁底板检测时,往往在桥梁上方选择安全绳挂点;而桥梁结构一般较高,十几米甚至几十米的桥墩很常见,如此爬壁机器人存在在高桥墩、桥梁底板检测时,从结构表面坠落并围绕安全绳挂点进行转动的情况,如此在爬壁设备摆动过程中,存在设备与现有桥梁结构碰撞,设备损坏的情况。
5、因此,如何有效的调整坠落爬壁机器人的摆动范围使得坠落爬壁机器人尽快恢复到稳定状态为本领域亟需解决的问题。
技术实现思路
1、针对现有爬壁设备在坠落后围绕安全挂点摆动幅度大、摆动时间长、摆动设备存在碰撞风险等问题,本发明提供一种基于变摆长摆动的快速消能系统,本方案能够针对坠落的爬壁设备动态的调整爬壁设备摆动的摆长,能够实现摆动设备(如爬壁设备)的快速消能,很好地克服了现有技术所存在的问题。
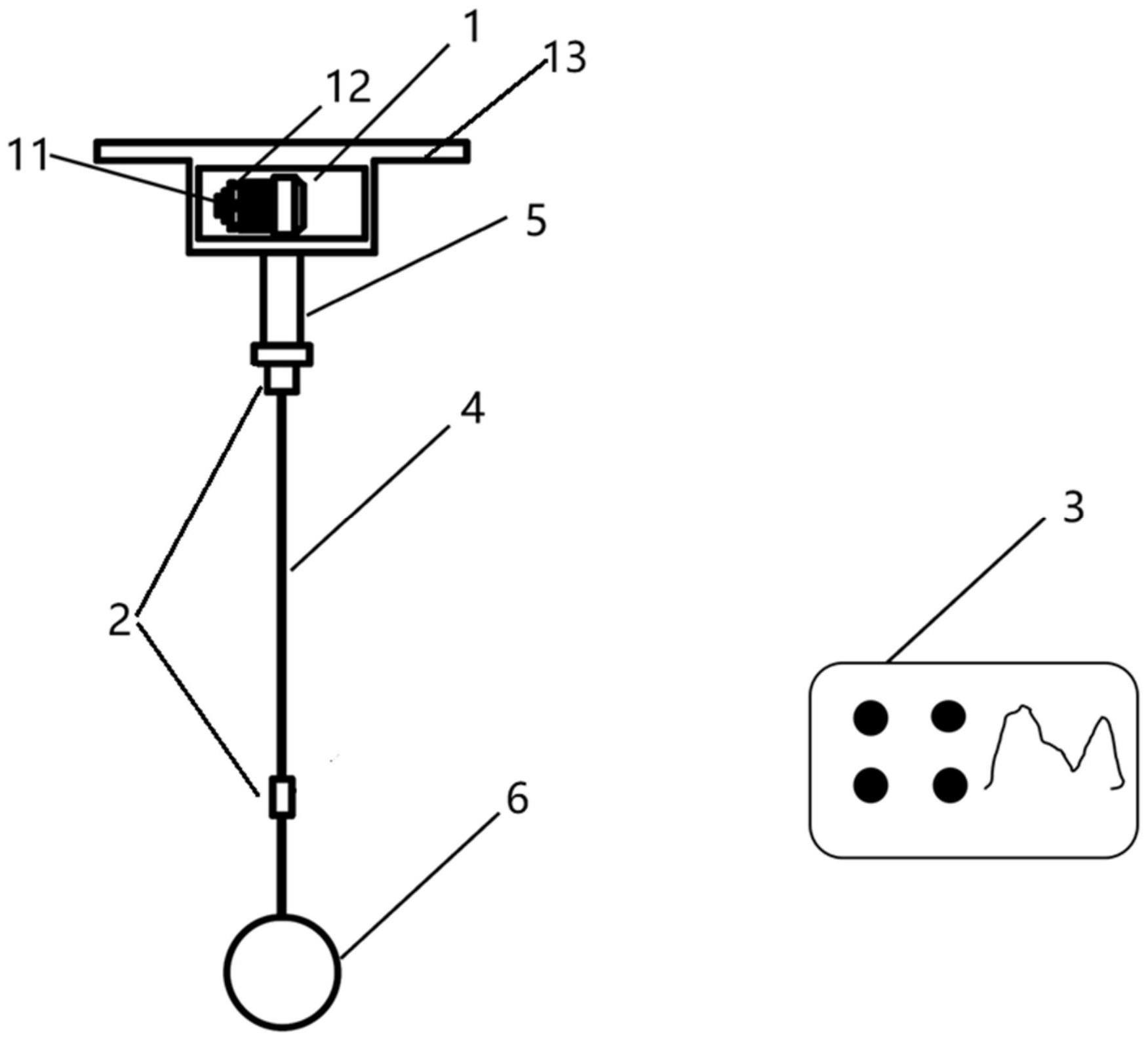
2、为了达到上述目的,本发明提供的基于变摆长摆动的快速消能系统,主要包括:摆绳、摆绳收放装置、摆绳位置测量装置、控制装置,
3、所述摆绳一端与摆绳收放装置连接,另一端连接爬壁设备;
4、所述摆绳收放装置能够实时收放摆绳动态调整摆绳收放装置与爬壁设备之间摆绳的长度;
5、所述摆绳位置测量装置相对于摆绳设置,能够测定摆绳摆动最高点与摆绳抵达挂点铅锤中心线时的位置;
6、所述控制装置与所述摆绳位置测量装置数据连接,并控制连接摆绳收放装置,根据所述摆绳位置测量装置所测得的摆绳实时摆动位置,控制所述摆绳收放装置收放摆绳的状态,在下摆过程中控制摆绳收放装置收摆绳,上摆过程中控制摆绳收放装置释放摆绳。
7、在本发明的一些实例中,所述摆绳收放装置包括滚筒组件以及转动圈数记录仪,所述滚筒组件用于缠绕摆绳,并通过控制滚筒组件转动方向来控制释放或收取摆绳,所述转动圈数记录仪安装在滚筒一侧,并与滚筒同轴,用于记录滚筒的转动圈数。
8、在本发明的一些实例中,所述摆绳位置测量装置包括中线测量组件与摆绳测力组件,所述中线测量组件对应摆绳设置,能够实时测量摆绳相对于铅垂线中心线的位置;所述摆绳测力组件对应设置在摆绳与爬壁设备之间,并靠近爬壁设备人,用于实时测量摆绳上的拉力。
9、在本发明的一些实例中,所述控制装置包括计算模块与控制模块,所述计算模块与摆绳位置测量装置数据连接,能够根据中线测量组件采集的摆绳摆动位置以及摆绳测力组件采集的摆绳实时拉力计算判断摆绳的摆动状态:上摆状态或者下摆状态;所述控制模块与所述计算模块数据交互,根据计算模块所计算确定的摆绳摆动状态生成摆绳收放指令,在摆绳处于上摆状态时控制滚筒组件同步释放摆绳,在摆绳处于下摆状态时控制滚筒组件同步收摆绳。
10、在本发明的一些实例中,所述控制装置在摆绳上摆过程中控制所述摆绳收放装置保持同步释放摆绳状态。
11、在本发明的一些实例中,所述控制装置在摆绳下摆过程中控制所述摆绳收放装置保持同步收摆绳状态。
12、在本发明的一些实例中,所述快速消能系统还包括挂具,所述挂具配合摆绳设置,对摆绳形成导向。
13、本发明提供的变摆长摆动的快速消能系统,针对摆绳的摆动状态,通过循环的两阶段快速收绳和释放绳的过程中,将爬壁设备坠落产生的能量快速消耗,使得爬壁设备能够快速从围绕挂点单摆运动中稳定下来,有效控制爬壁设备摆动的幅度和摆动时间,防止设备与其它结构的碰撞,降低了设备损坏的风险。
技术特征:
1.基于变摆长摆动的快速消能系统,其特征在于,包括:摆绳、摆绳收放装置、摆绳位置测量装置、控制装置,
2.根据权利要求1所述的基于变摆长摆动的快速消能系统,其特征在于,所述摆绳收放装置包括滚筒组件以及转动圈数记录仪,所述滚筒组件用于缠绕摆绳,并通过控制滚筒组件转动方向来控制释放或收取摆绳,所述转动圈数记录仪安装在滚筒一侧,并与滚筒同轴,用于记录滚筒的转动圈数。
3.根据权利要求1所述的基于变摆长摆动的快速消能系统,其特征在于,所述摆绳位置测量装置包括中线测量组件与摆绳测力组件,所述中线测量组件对应摆绳设置,能够实时测量摆绳相对于铅垂线中心线的位置;所述摆绳测力组件对应设置在摆绳与爬壁设备之间,并靠近爬壁设备人,用于实时测量摆绳上的拉力。
4.根据权利要求3所述的基于变摆长摆动的快速消能系统,其特征在于,所述控制装置包括计算模块与控制模块,所述计算模块与摆绳位置测量装置数据连接,能够根据中线测量组件采集的摆绳摆动位置以及摆绳测力组件采集的摆绳实时拉力计算判断摆绳的摆动状态:上摆状态或者下摆状态;所述控制模块与所述计算模块数据交互,根据计算模块所计算确定的摆绳摆动状态生成摆绳收放指令,在摆绳处于上摆状态时控制滚筒组件同步释放摆绳,在摆绳处于下摆状态时控制滚筒组件同步收摆绳。
5.根据权利要求1所述的基于变摆长摆动的快速消能系统,其特征在于,所述控制装置在摆绳上摆过程中控制所述摆绳收放装置保持同步释放摆绳状态。
6.根据权利要求1所述的基于变摆长摆动的快速消能系统,其特征在于,所述控制装置在摆绳下摆过程中控制所述摆绳收放装置保持同步收摆绳状态。
7.根据权利要求1所述的基于变摆长摆动的快速消能系统,其特征在于,所述快速消能系统还包括挂具,所述挂具配合摆绳设置,对摆绳形成导向。
技术总结
本发明公开了一种基于变摆长摆动的快速消能系统,其包括:摆绳、摆绳收放装置、摆绳位置测量装置、控制装置,摆绳一端与摆绳收放装置连接,另一端连接爬壁设备;摆绳收放装置能够实时收放摆绳动态调整摆绳收放装置与爬壁设备之间摆绳的长度;摆绳位置测量装置能够测定摆绳摆动最高点与摆绳抵达挂点铅锤中心线时的位置;控制装置根据所述摆绳位置测量装置所测得的摆绳实时摆动位置,控制所述摆绳收放装置收放摆绳的状态。本方案能够实现摆动设备的快速消能,即将摆动的爬壁设备动能或势能快速消耗,快速抵消左右摆动的能量,使得跌落处于摆动状态的爬壁设备快速稳定后沿着安全绳垂直运动,从而很好地克服了现有技术所存在的问题。
技术研发人员:孙文博,李得乐,彭建,张凡,蒋绮琛,马济鲁,张林
受保护的技术使用者:中国建筑第八工程局有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!