立体库定位点清洁方法及立体库与流程
本发明涉及立体库,尤其涉及一种立体库定位点清洁方法及立体库。
背景技术:
1、立体库中有多台四向车搬运货物,四向车通过识别定位标识即反光贴、rfid标签卡或二维码来获取库位信息。准确获取库位信息是四向车准确存取货物的关键,但在四向车不同的应用环境中,存在定位标识被污染的风险。例如在存取整托啤酒时,因啤酒瓶破裂,啤酒液体附着在定位标识上,导致定位标识遭到污染,四向车不能正确识别库位信息,且不能及时在小范围内锁定相关通道,以至于影响整个立体库的工作效率。
2、因此,亟需一种立体库定位点清洁方法及立体库,以解决上述问题。
技术实现思路
1、本发明的一个目的在于:提供一种立体库定位点清洁方法,能够在四向车识别不到定位标识时,快速识别问题并进行处理,减小对立体库工作效率的影响。
2、为达此目的,本发明采用以下技术方案:
3、提供一种立体库定位点清洁方法,包括以下步骤:
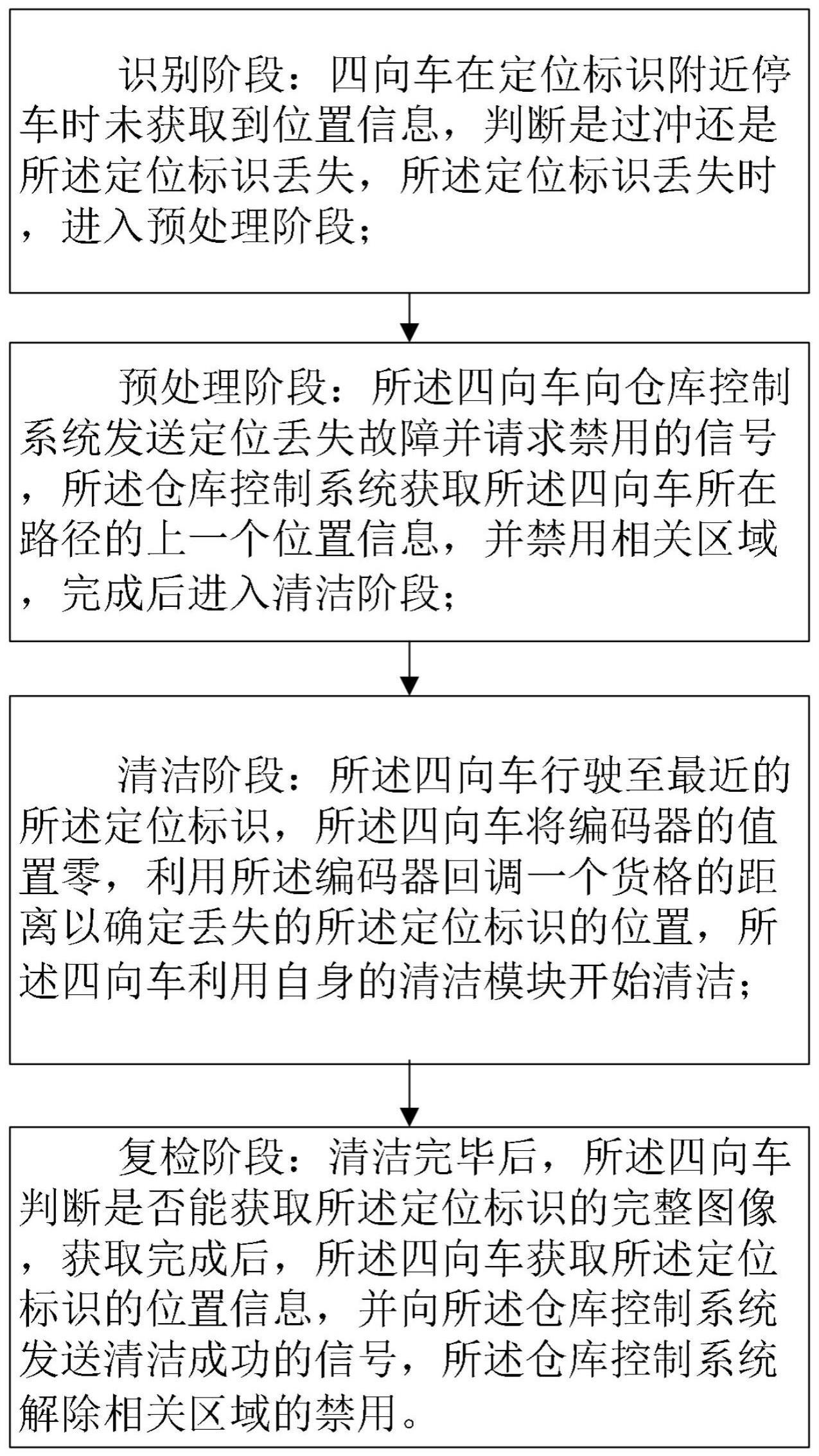
4、识别阶段:四向车在定位标识附近停车时未获取到位置信息,判断是过冲还是所述定位标识丢失,所述定位标识丢失时,进入预处理阶段;
5、预处理阶段:所述四向车向仓库控制系统发送定位丢失故障并请求禁用的信号,所述仓库控制系统获取所述四向车所在路径的上一个位置信息,并禁用相关区域,完成后进入清洁阶段;
6、清洁阶段:所述四向车行驶至最近的所述定位标识,所述四向车将编码器的值置零,利用所述编码器回调一个货格的距离以确定丢失的所述定位标识的位置,所述四向车利用自身的清洁模块开始清洁;
7、复检阶段:清洁完毕后,所述四向车判断是否能获取所述定位标识的完整图像,获取完成后,所述四向车获取所述定位标识的位置信息,并向所述仓库控制系统发送清洁成功的信号,所述仓库控制系统解除相关区域的禁用。
8、作为立体库定位点清洁方法的一种优选方案,所述四向车在存取货物或定位换向时,路过所述定位标识附近未获取到所述位置信息时,进入所述识别阶段;
9、所述四向车不需要存取货物且不需要定位换向时,路过所述定位标识附近未获取到所述位置信息时,不进入所述识别阶段,所述四向车继续行驶以找到下一个所述定位标识。
10、作为立体库定位点清洁方法的一种优选方案,所述识别阶段中,判断所述四向车是过冲还是所述定位标识丢失的步骤包括:
11、判断是否获取了所述定位标识的全部图像,否则判断为所述定位标识丢失,是即进一步判断获取所述定位标识时所述四向车的速度是否高于停车最大速度,是则判断为所述四向车过冲。
12、作为立体库定位点清洁方法的一种优选方案,所述识别阶段中,判断所述四向车过冲后,进入过冲回调阶段,所述过冲回调阶段包括以下步骤:
13、低速回调小于一个货格长度的距离,以使再次获取所述定位标识时速度低于停车最大速度。
14、作为立体库定位点清洁方法的一种优选方案,判断是否获取了所述定位标识的全部图像时,如果所述定位标识为反光贴,则判断获取有信号的时长,根据所述四向车的移动速度,计算得到所述反光贴的长度,或在获取到所述反光贴的信号时所述编码器置零,结合有信号期间所述编码器的数据,得到所述反光贴的长度,即可判断是否为正常长度,是则获取了所述定位标识的全部图像。
15、作为立体库定位点清洁方法的一种优选方案,判断是否获取了所述定位标识的全部图像时,如果所述定位标识为二维码,则判断是否拍摄了所述二维码的全部图像,是则获取了所述定位标识的全部图像。
16、作为立体库定位点清洁方法的一种优选方案,所述清洁阶段中,所述四向车行驶至最近的所述定位标识,为正向行驶至下一个最近的所述定位标识,再反向回调,或者反向行驶至上一个最近的所述定位标识,再正向回调。
17、作为立体库定位点清洁方法的一种优选方案,所述清洁阶段中,所述四向车以停车点为中心点,正反向各清洁预设长度l,以保证清洁效果。
18、作为立体库定位点清洁方法的一种优选方案,所述复检阶段中,如果所述四向车未获取到所述定位标识的所述完整图像,则判断为清洁不达标,所述四向车向所述仓库控制系统发送二次清洁的信号。
19、本发明的另一个目的在于:提供一种立体库,能够在四向车识别不到定位标识时,快速识别问题并进行处理,减小对立体库工作效率的影响。
20、为达此目的,本发明采用以下技术方案:
21、提供一种立体库,应用上述的立体库定位点清洁方法,所述立体库设置有多个定位标识,以供四向车判断位置信息。
22、本发明的有益效果:
23、本发明提供了一种立体库定位点清洁方法,包括以下步骤:识别阶段:四向车在定位标识附近停车时未获取到位置信息,判断是过冲还是定位标识丢失,定位标识丢失时,进入预处理阶段;预处理阶段:四向车向仓库控制系统发送定位丢失故障并请求禁用的信号,仓库控制系统获取四向车所在路径的上一个位置信息,并禁用相关区域,完成后进入清洁阶段;清洁阶段:四向车行驶至最近的定位标识,四向车将编码器的值置零,利用编码器回调一个货格的距离以确定丢失的定位标识的位置,四向车利用自身的清洁模块开始清洁;复检阶段:清洁完毕后,四向车判断是否能获取定位标识的完整图像,获取完成后,四向车获取定位标识的位置信息,并向仓库控制系统发送清洁成功的信号,仓库控制系统解除相关区域的禁用。通过上述方法,四向车即可快速识别判断不能获取到位置信息的原因,并做出相应处理,不需要人工识别问题和处理,不仅能提高问题处理效率,还有利于保证人员安全。
24、本发明还提供了一种立体库,应用上述的立体库定位点清洁方法,该立体库设置有多个定位标识,以供四向车判断位置信息。该立体库使用上述方法,即可在四向车识别不到定位标识时,快速识别问题并进行处理,减小对立体库工作效率的影响。
技术特征:
1.立体库定位点清洁方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的立体库定位点清洁方法,其特征在于,所述四向车(2)在存取货物或定位换向时,路过所述定位标识附近未获取到所述位置信息时,进入所述识别阶段;
3.根据权利要求1所述的立体库定位点清洁方法,其特征在于,所述识别阶段中,判断所述四向车(2)是过冲还是所述定位标识丢失的步骤包括:
4.根据权利要求1所述的立体库定位点清洁方法,其特征在于,所述识别阶段中,判断所述四向车(2)过冲后,进入过冲回调阶段,所述过冲回调阶段包括以下步骤:
5.根据权利要求3所述的立体库定位点清洁方法,其特征在于,判断是否获取了所述定位标识的全部图像时,如果所述定位标识为反光贴,则判断获取有信号的时长,根据所述四向车(2)的移动速度,计算得到所述反光贴的长度,或在获取到所述反光贴的信号时所述编码器置零,结合有信号期间所述编码器的数据,得到所述反光贴的长度,即可判断是否为正常长度,是则获取了所述定位标识的全部图像。
6.根据权利要求3所述的立体库定位点清洁方法,其特征在于,判断是否获取了所述定位标识的全部图像时,如果所述定位标识为二维码,则判断是否拍摄了所述二维码的全部图像,是则获取了所述定位标识的全部图像。
7.根据权利要求1所述的立体库定位点清洁方法,其特征在于,所述清洁阶段中,所述四向车(2)行驶至最近的所述定位标识,为正向行驶至下一个最近的所述定位标识,再反向回调,或者反向行驶至上一个最近的所述定位标识,再正向回调。
8.根据权利要求1所述的立体库定位点清洁方法,其特征在于,所述清洁阶段中,所述四向车(2)以停车点为中心点,正反向各清洁预设长度l,以保证清洁效果。
9.根据权利要求1所述的立体库定位点清洁方法,其特征在于,所述复检阶段中,如果所述四向车(2)未获取到所述定位标识的所述完整图像,则判断为清洁不达标,所述四向车(2)向所述仓库控制系统发送二次清洁的信号。
10.立体库,其特征在于,应用如权利要求1-9任一项所述的立体库定位点清洁方法,所述立体库设置有多个定位标识,以供四向车(2)判断位置信息。
技术总结
本发明涉及立体库技术领域,尤其涉及一种立体库定位点清洁方法,包括以下步骤:四向车在定位标识附近停车时未获取到位置信息,判断是过冲还是定位标识丢失,定位标识丢失时,进入预处理阶段;四向车向仓库控制系统发送定位丢失故障并请求禁用的信号,仓库控制系统获取四向车的上一个位置信息,禁用相关区域;四向车行驶至最近的定位标识,将编码器的值置零,利用编码器回调一个货格的距离以确定丢失的定位标识的位置,四向车利用自身的清洁模块清洁;清洁完毕后四向车判断是否能获取定位标识的完整图像,能则获取定位标识的位置信息并发送清洁成功信号,仓库控制系统解除禁用。本发明还提供一种立体库,应用上述立体库定位点清洁方法。
技术研发人员:钱辉,祁步春,陈迪明,杨飞,方辰呈
受保护的技术使用者:浙江世仓智能仓储设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!