一种用于柔性输送的智能控制方法及系统与流程
本申请涉及输送,特别是涉及一种用于柔性输送的智能控制方法及系统。
背景技术:
1、柔性输送设备在生产线中的运用已经成为了当今制造业的主流之一,它们可以实现生产过程的自动化、高效化和灵活化。然而,目前存在一些问题需要解决,其中一个比较重要的问题就是柔性输送设备的布设规划依赖于人工经验。
2、传统上,柔性输送设备的布设方案都是由工程师根据现场实际情况进行设计,没有系统化的方法去规划。这种方法容易导致柔性输送设备的布设方案与生产输送任务适配度不高,从而导致生产输送任务成本较高等问题的出现。
3、综上所述,现有技术中存在采用柔性输送设备进行生产线中生产设备连接时,柔性输送设备布设规划依赖于人工经验,存在柔性输送设备的布设方案与生产输送任务适配度不高,导致生产输送任务成本较高的技术问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够实现根据输送任务匹配确定所需柔性输送设备以及柔性输送设备的布设路径,降低柔性输送设备在生产线中进行生产设备连接布设中对于人工经验的依赖性,提高所述柔性输送设备在生产线中调用布设的智能化程度,降低生产线中物料输送成本的一种用于柔性输送的智能控制方法及系统。
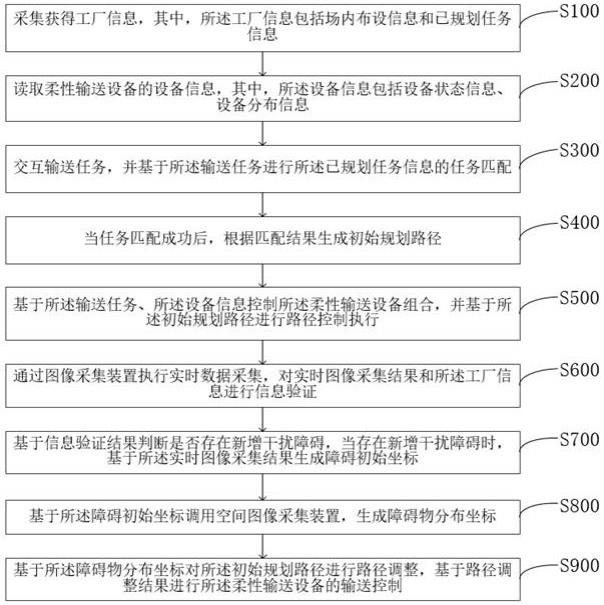
2、一种用于柔性输送的智能控制方法,方法包括:采集获得工厂信息,其中,所述工厂信息包括场内布设信息和已规划任务信息;读取柔性输送设备的设备信息,其中,所述设备信息包括设备状态信息、设备分布信息;交互输送任务,并基于所述输送任务进行所述已规划任务信息的任务匹配;当任务匹配成功后,根据匹配结果生成初始规划路径;基于所述输送任务、所述设备信息控制所述柔性输送设备组合,并基于所述初始规划路径进行路径控制执行;通过图像采集装置执行实时数据采集,对实时图像采集结果和所述工厂信息进行信息验证;基于信息验证结果判断是否存在新增干扰障碍,当存在新增干扰障碍时,基于所述实时图像采集结果生成障碍初始坐标;基于所述障碍初始坐标调用空间图像采集装置,生成障碍物分布坐标;基于所述障碍物分布坐标对所述初始规划路径进行路径调整,基于路径调整结果进行所述柔性输送设备的输送控制。
3、一种用于柔性输送的智能控制系统,所述系统包括:工厂信息采集模块,用于采集获得工厂信息,其中,所述工厂信息包括场内布设信息和已规划任务信息;设备信息读取模块,用于读取柔性输送设备的设备信息,其中,所述设备信息包括设备状态信息、设备分布信息;输送任务交互模块,用于交互输送任务,并基于所述输送任务进行所述已规划任务信息的任务匹配;初始路径规划模块,用于当任务匹配成功后,根据匹配结果生成初始规划路径;路径控制执行模块,用于基于所述输送任务、所述设备信息控制所述柔性输送设备组合,并基于所述初始规划路径进行路径控制执行;信息采集验证模块,用于通过图像采集装置执行实时数据采集,对实时图像采集结果和所述工厂信息进行信息验证;信息验证判断模块,用于基于信息验证结果判断是否存在新增干扰障碍,当存在新增干扰障碍时,基于所述实时图像采集结果生成障碍初始坐标;障碍坐标生成模块,用于基于所述障碍初始坐标调用空间图像采集装置,生成障碍物分布坐标;输送控制执行模块,用于基于所述障碍物分布坐标对所述初始规划路径进行路径调整,基于路径调整结果进行所述柔性输送设备的输送控制。
4、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
5、采集获得工厂信息,其中,所述工厂信息包括场内布设信息和已规划任务信息;
6、读取柔性输送设备的设备信息,其中,所述设备信息包括设备状态信息、设备分布信息;
7、交互输送任务,并基于所述输送任务进行所述已规划任务信息的任务匹配;
8、当任务匹配成功后,根据匹配结果生成初始规划路径;
9、基于所述输送任务、所述设备信息控制所述柔性输送设备组合,并基于所述初始规划路径进行路径控制执行;
10、通过图像采集装置执行实时数据采集,对实时图像采集结果和所述工厂信息进行信息验证;
11、基于信息验证结果判断是否存在新增干扰障碍,当存在新增干扰障碍时,基于所述实时图像采集结果生成障碍初始坐标;
12、基于所述障碍初始坐标调用空间图像采集装置,生成障碍物分布坐标;
13、基于所述障碍物分布坐标对所述初始规划路径进行路径调整,基于路径调整结果进行所述柔性输送设备的输送控制。
14、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
15、采集获得工厂信息,其中,所述工厂信息包括场内布设信息和已规划任务信息;
16、读取柔性输送设备的设备信息,其中,所述设备信息包括设备状态信息、设备分布信息;
17、交互输送任务,并基于所述输送任务进行所述已规划任务信息的任务匹配;
18、当任务匹配成功后,根据匹配结果生成初始规划路径;
19、基于所述输送任务、所述设备信息控制所述柔性输送设备组合,并基于所述初始规划路径进行路径控制执行;
20、通过图像采集装置执行实时数据采集,对实时图像采集结果和所述工厂信息进行信息验证;
21、基于信息验证结果判断是否存在新增干扰障碍,当存在新增干扰障碍时,基于所述实时图像采集结果生成障碍初始坐标;
22、基于所述障碍初始坐标调用空间图像采集装置,生成障碍物分布坐标;
23、基于所述障碍物分布坐标对所述初始规划路径进行路径调整,基于路径调整结果进行所述柔性输送设备的输送控制。
24、上述一种用于柔性输送的智能控制方法及系统,解决了现有技术中存在采用柔性输送设备进行生产线中生产设备连接时,柔性输送设备布设规划依赖于人工经验,存在柔性输送设备的布设方案与生产输送任务适配度不高,导致生产输送任务成本较高的技术问题,实现了根据输送任务匹配确定所需柔性输送设备以及柔性输送设备的布设路径,降低柔性输送设备在生产线中进行生产设备连接布设中对于人工经验的依赖性,提高所述柔性输送设备在生产线中调用布设的智能化程度,降低生产线中物料输送成本的技术效果。
25、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种用于柔性输送的智能控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述方法还包括:
3.如权利要求2所述的方法,其特征在于,所述基于所述路径优化结果进行新增路径分析,还包括:
4.如权利要求1所述的方法,其特征在于,所述方法还包括:
5.如权利要求1所述的方法,其特征在于,所述方法还包括:
6.一种用于柔性输送的智能控制系统,其特征在于,所述系统包括:
7.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5中任一项所述的方法的步骤。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述的方法的步骤。
技术总结
本申请涉及输送技术领域,提供一种用于柔性输送的智能控制方法及系统。通过读取柔性输送设备的设备信息,基于输送任务进行工厂信息的任务匹配,根据匹配结果生成初始规划路径,基于输送任务、设备信息控制柔性输送设备组合并基于初始规划路径进行路径控制执行,当存在新增干扰障碍时基于障碍物分布坐标对初始规划路径进行路径调整进行柔性输送设备的输送控制。解决现有技术中存在采用柔性输送设备进行生产线中生产设备连接时依赖于人工经验,存在布设方案与生产输送任务适配度不高的技术问题,实现了提高所述柔性输送设备在生产线中调用布设的智能化程度,降低生产线中物料输送成本的技术效果。
技术研发人员:尤健,肖明良
受保护的技术使用者:无锡同联机电工程有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!