一种基于图像处理技术的集装箱装锁系统及方法与流程
本发明涉及图像处理,特别涉及一种基于图像处理技术的集装箱装锁系统及方法。
背景技术:
1、随着港口自动化的要求逐步提升,港口在无人化进程中逐步实现了智能理货理货、视频远控、无人集卡装卸等无人化作业流程。其中部分无人化进程较快的码头已经开始使用自动锁岛,即,使用机械臂对集装箱箱底锁头进行自动装卸作业,从而打破港口自动化无人化改造中最后一个壁垒。
2、在通过自动锁岛进行装锁的过程中,要求机械臂能够根据不同的锁头的构造与机械原理,执行对应的机械运动模式与程序,从而将锁头安装在集装箱箱底。但在现有技术中,由于集装箱来自不同船公司,导致集装箱箱底锁头的种类和形状繁多,使得通过自动锁岛进行装锁操作时,自动化系统难以快速且准确地判断出锁头的类别,因此也就无法快速准确地指导机械臂动作,进而导致装锁作业的效率低,并且容易出现锁头错装的情况。
技术实现思路
1、针对现有技术存在的集装箱箱底锁头装锁作业效率低以及准确率不高的问题,本发明的目的在于提供一种基于图像处理技术的集装箱装锁系统及方法,以便于至少部分地解决上述问题。
2、为实现上述目的,本发明的技术方案为:
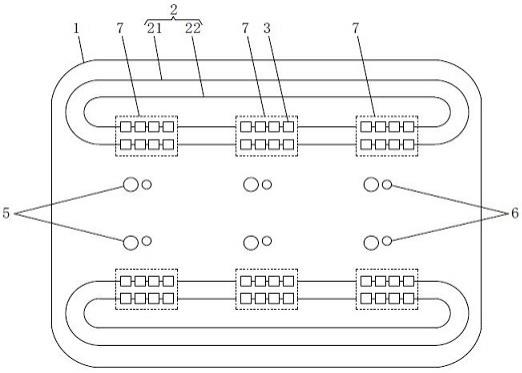
3、第一方面,本发明提供一种基于图像处理技术的集装箱装锁系统,包括锁岛、机械臂、图像采集设备和控制器;所述锁岛配置为用于对集装箱的箱底进行装卸锁的区域,所述锁岛内设有用作传送的锁带,所述锁带上安装有锁盘,所述锁盘用于承载与所述集装箱箱底上的锁孔配合使用的锁头;
4、其中,所述控制器与所述机械臂、所述图像采集设备及所述锁带通信连接;所述锁带用于在所述控制器的控制下运动以使所述锁盘位于所述机械臂对应的抓取位中;所述图像采集设备用于在所述控制器的控制下对所述抓取位进行拍照并形成锁盘图像;所述控制器用于根据集装箱的型号及预置的模型对所述锁盘图像进行处理,并判断所述锁盘图像中是否含有需要的锁头,所述机械臂用于在所述控制器的控制下按照预定的轨迹和动作将需要的锁头安装到所述集装箱箱底上的锁孔中。
5、优选的,所述抓取位有多个,且所述抓取位的数量及布置方式与所述集装箱箱底上锁孔的数量和布置方式均相同;其中,所述锁带的传送路径覆盖各所述抓取位,且在所述锁带的至少一个停止位置下,各所述抓取位均对应有至少一个所述锁盘。
6、优选的,所述锁带的停止位置有多个,且在所述锁带的每个停止位置下,各所述抓取位均对应有至少一个所述锁盘。
7、优选的,所述锁带有两个并对称地布置在所述锁岛的两侧,各所述抓取位则对称地分布在两个所述锁带上。
8、优选的,所述锁带配置为环状,以使得所述锁带上安装的锁盘往复循环地经过所述抓取位。
9、优选的,每个所述抓取位均配置有所述机械臂和所述图像采集设备,各所述机械臂及各所述图像采集设备均与所述控制器通信连接。
10、第二方面,本发明还提供一种应用于上述系统的方法,包括以下步骤:
11、s1:响应于装锁信号,控制器控制锁带运动至任意停止位置;
12、s2:控制器接收图像采集设备针对各抓取位采集到的锁盘图像;
13、s3:控制器根据集装箱的型号及预置的模型识别所述锁盘图像中是否含有需要的锁头,是则进入s4,否则进入s5;
14、s4:控制器控制机械臂按照预定的轨迹和动作将需要的锁头安装到集装箱箱底上的锁孔中;
15、s5:控制器控制锁带运动至另一停止位置;
16、s6:重复步骤s2-s4的内容,直至集装箱箱底上的各锁孔中全部安装有需要的锁头。
17、优选的,在步骤s2中,所述图像采集设备通过拍摄视频的方式获取抓取位的锁盘图像,所述控制器从所述图像采集设备拍摄到的视频流码中选取最近一帧图像作为所述锁盘图像。
18、优选的,在步骤s3中,所述控制器根据集装箱的型号及预置的模型判断所述锁盘图像中是否含有需要的锁头的步骤包括:
19、控制器判断所述锁盘图像中是否含有锁头,是则进入下一步,否则结束;
20、控制器根据预置的模型对锁盘图像中的锁头进行分类,确定锁头的类别;
21、控制器根据集装箱的型号及所述锁头的类别是否为所需的锁头。
22、优选的,在步骤s5中,当所述控制器控制所述锁带转动后,所述控制器还根据所述锁带的转动方向及距离来判断已经识别过锁头信息的锁盘是否落入另一抓取位中,是则将针对所述另一抓取位采集到的锁盘图像与对应的已进行过锁头信息识别的锁盘图像进行融合,实现多角度下的多帧锁头信息融合,以提高锁头识别的准确率。
23、采用上述技术方案,本发明的有益效果在于:本发明通过锁带的运动而将其上安装的锁盘带动到机械臂对应的抓取位中,再通过图像采集设备对抓取位进行拍照并形成锁盘图像,再通过控制器像判断锁盘图像中是否含有需要的锁头,并通过机械臂按照预定的轨迹和动作将需要的锁头安装到集装箱箱底上的锁孔中。可以看出,本发明通过控制器对锁盘图像的处理后即可快速准确地识别出锁头的类别,从而指导机械臂快速准确地进行锁头安装操作;另外,本发明还能够在未识别出需要的锁头类别时,通过锁带运动而使另一锁盘进入抓取位中,从而能够提高装锁作业的持续性和连续性。
技术特征:
1.一种基于图像处理技术的集装箱装锁系统,其特征在于:包括锁岛、机械臂、图像采集设备和控制器;所述锁岛配置为用于对集装箱的箱底进行装卸锁的区域,所述锁岛内设有用作传送的锁带,所述锁带上安装有锁盘,所述锁盘用于承载与所述集装箱箱底上的锁孔配合使用的锁头;
2.根据权利要求1所述的系统,其特征在于:所述抓取位有多个,且所述抓取位的数量及布置方式与所述集装箱箱底上锁孔的数量和布置方式均相同;其中,所述锁带的传送路径覆盖各所述抓取位,且在所述锁带的至少一个停止位置下,各所述抓取位均对应有至少一个所述锁盘。
3.根据权利要求2所述的系统,其特征在于:所述锁带的停止位置有多个,且在所述锁带的每个停止位置下,各所述抓取位均对应有至少一个所述锁盘。
4.根据权利要求2所述的系统,其特征在于:所述锁带有两个并对称地布置在所述锁岛的两侧,各所述抓取位则对称地分布在两个所述锁带上。
5.根据权利要求3或4所述的系统,其特征在于:所述锁带配置为环状,以使得所述锁带上安装的锁盘往复循环地经过所述抓取位。
6.根据权利要求2所述的系统,其特征在于:每个所述抓取位均配置有所述机械臂和所述图像采集设备,各所述机械臂及各所述图像采集设备均与所述控制器通信连接。
7.一种应用于权利要求2-6任一项所述系统的方法,其特征在于:包括以下步骤:
8.根据权利要求7所述的方法,其特征在于:在步骤s2中,所述图像采集设备通过拍摄视频的方式获取抓取位的锁盘图像,所述控制器从所述图像采集设备拍摄到的视频流码中选取最近一帧图像作为所述锁盘图像。
9.根据权利要求7所述的方法,其特征在于:在步骤s3中,所述控制器根据集装箱的型号及预置的模型判断所述锁盘图像中是否含有需要的锁头的步骤包括:
10.根据权利要求7所述的方法,其特征在于:在步骤s5中,当所述控制器控制所述锁带转动后,所述控制器还根据所述锁带的转动方向及距离来判断已经识别过锁头信息的锁盘是否落入另一抓取位中,是则将针对所述另一抓取位采集到的锁盘图像与对应的已进行过锁头信息识别的锁盘图像进行融合,实现多角度下的多帧锁头信息融合,以提高锁头识别的准确率。
技术总结
本发明公开了一种基于图像处理技术的集装箱装锁系统及方法,属于图像处理技术领域,系统包括锁岛、机械臂、图像采集设备和控制器;锁岛配置为用于对集装箱的箱底进行装卸锁的区域,锁岛内设有用作传送的锁带,锁带上安装有锁盘,锁盘用于承载与集装箱箱底上的锁孔配合使用的锁头;控制器与机械臂、图像采集设备及锁带通信连接;锁带用于使锁盘位于机械臂对应的抓取位中,图像采集设备用于对抓取位进行拍照并形成锁盘图像,控制器用于根据锁盘图像判断锁盘上是否承载有需要的锁头,机械臂用于按照预定的轨迹和动作将锁头安装到集装箱箱底上的锁孔中。本发明能够快速准确地识别出锁头的类别,从而指导机械臂快速准确地进行锁头安装操作。
技术研发人员:范柘
受保护的技术使用者:上海安维尔信息科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!