垃圾箱、垃圾压填控制方法及环卫机械与流程
本发明属于环卫机械,尤其涉及一种垃圾箱、垃圾压填控制方法及环卫机械。
背景技术:
1、现有技术中的环卫机械,如垃圾收集车,在进行垃圾压填过程中,需要刮板朝向垃圾箱的内部进行垃圾刮合摆动,若刮板的刮合位置无法控制,将会导致刮板刮伤垃圾箱的内侧壁。并且,现有的刮板机构虽然可以将垃圾压住,但无法阻挡少量轻飘物从下方间隙中飘出,并且无法阻挡臭味外溢,当雨季时,垃圾箱内会储存大量污水,车辆工作前还需要进行排水工作,增加工作量。
技术实现思路
1、本发明的主要目的是提出一种垃圾箱、垃圾压填控制方法及环卫机械,旨在解决现有技术中的垃圾箱在刮板进行垃圾压填时容易损坏垃圾箱的侧壁的技术问题。
2、为了实现上述目的,本发明提供一种垃圾箱,垃圾箱包括:
3、垃圾箱本体,开设有垃圾填入口;
4、滑板机构,包括滑板架以及用于驱动滑板架沿前后移动的滑板油缸;
5、刮板机构,设于滑板架上;和
6、控制单元,控制单元配置为:
7、实时获取滑板油缸的活塞杆的当前位置信息;
8、根据当前位置信息判断滑板架是否到达预设垃圾压填位置;
9、当滑板架到达预设垃圾压填位置时,控制刮板机构进行垃圾压填。
10、在本发明的实施例中,所述控制器进一步被配置为:
11、在所述滑板架到达预设垃圾压填位置后,控制所述滑板架继续前行,以驱动所述刮板机构朝向所述垃圾箱内进行刮合摆动。
12、在本发明的实施例中,控制单元包括控制器以及设于活塞杆上的位移传感器,位移传感器用于检测与活塞杆连接的活塞的位移,控制器与位移传感器电连接并进一步地被配置为:
13、实时接收位移传感器发送的活塞位移信号;
14、根据活塞位移信号判断活塞杆的当前位置。
15、在本发明的实施例中,控制器进一步被配置为:
16、当滑板架未到达预设垃圾压填位置时,控制滑板油缸的活塞杆继续伸缩运动,直至到达预设垃圾压填位置时停止动作。
17、在本发明的实施例中,控制器进一步被配置为:
18、当垃圾箱进行遮盖垃圾填入口时,控制滑板油缸动作以驱动滑板架前行到预设位置;
19、根据所述位移传感器发送的活塞位移信号控制所述刮板机构执行密封遮盖动作。
20、在本发明的实施例中,刮板机构包括刮板和刮板油缸,刮板与滑板架的后侧枢转连接,刮板油缸设于滑板架上且伸缩端与刮板的前侧铰接,刮板油缸用于驱动刮板朝向或远离垃圾填入口摆动,以使刮板进行刮合摆动或者密封盖合垃圾填入口。
21、在本发明的实施例中,垃圾箱本体上还设有沿前后方向延伸的导轨,滑板架包括滑板以及沿宽度方向安装于滑板两侧的滑块组件,每组滑块组件均包括分别沿长度方向布置于滑板的两端的两个滑块,每个滑块和导轨滑动接触配合。
22、在本发明的实施例中,滑板油缸包括缸筒和滑动设于缸筒内的活塞杆,活塞杆的前端与位于前侧的滑块铰接,缸筒的底端通过安装座安装于垃圾箱本体上。
23、在本发明的实施例中,缸筒背离活塞杆的一端安装有连接板,安装座包括依次连接的:
24、固定部,位于导轨的下方并可拆卸地连接于垃圾箱本体上;和
25、铰接部,背离固定部的一侧与连接板铰接。
26、在本发明的实施例中,位于前侧的滑块的底部所在的水平面低于位于后侧的滑块的底部所在的水平面。
27、在本发明的实施例中,还提出一种垃圾箱的垃圾压填控制方法,应用于如上所述的垃圾箱中,该垃圾箱的垃圾压填控制方法的步骤包括:
28、实时获取活塞杆的当前位置信息;
29、根据当前位置信息判断滑板架是否到达预设垃圾压填位置;
30、当滑板架到达预设垃圾压填位置时,控制刮板机构进行垃圾压填。
31、当滑板架未到达预设垃圾压填位置时,控制滑板油缸的活塞杆继续伸缩运动,直至到达预设垃圾压填位置时停止动作。
32、在本发明的实施例中,垃圾箱的垃圾压填控制方法的步骤还包括:
33、在滑板架到达预设垃圾压填位置后,控制滑板架继续前行,以驱动刮板机构朝向垃圾箱内进行刮合摆动。
34、在本发明的实施例中,实时获取活塞杆的当前位置信息的步骤包括:
35、实时获取位移传感器发送的活塞位移信号;
36、根据活塞位移信号判断活塞杆的当前位置。
37、在本发明的实施例中,垃圾箱的垃圾压填控制方法还包括:
38、当垃圾压填完毕时,控制滑板油缸动作以驱动滑板架前行到预设位置;
39、根据位移传感器发送的活塞位移信号控制刮板机构密封遮盖所述垃圾填入口。
40、在本发明的实施例中,还提出一种环卫机械,包括如上所述的垃圾箱。
41、通过上述技术方案,本发明实施例所提供的垃圾箱具有如下的有益效果:
42、在垃圾箱本体的尾部开设有垃圾填入口,滑板机构包括滑板架以及用于驱动滑板架沿前后移动的滑板油缸,刮板机构设于滑板架上;本申请通过控制单元实时获取滑板油缸的活塞杆的当前位置信息;根据当前位置信息判断滑板架是否到达预设垃圾压填位置;当滑板架到达预设垃圾压填位置时,控制刮板机构进行垃圾压填。由于控制单元可以精确获取滑板油缸的活塞杆的位置信息,根据活塞杆的位置判断滑板架是否到达了预设垃圾压填位置,从而可以防止在垃圾压填过程中刮板刮伤垃圾箱本体的侧壁。
43、本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种垃圾箱,其特征在于,所述垃圾箱包括:
2.根据权利要求1所述的垃圾箱,其特征在于,所述控制器进一步被配置为:
3.根据权利要求1所述的垃圾箱,其特征在于,所述控制单元包括控制器以及设于所述活塞杆(222)上的位移传感器(50),所述位移传感器(50)用于检测与所述活塞杆(222)连接的活塞的位移,所述控制器与所述位移传感器(50)电连接并进一步地被配置为:
4.根据权利要求3所述的垃圾箱,其特征在于,所述控制器进一步被配置为:
5.根据权利要求3所述的垃圾箱,其特征在于,所述控制器进一步被配置为:
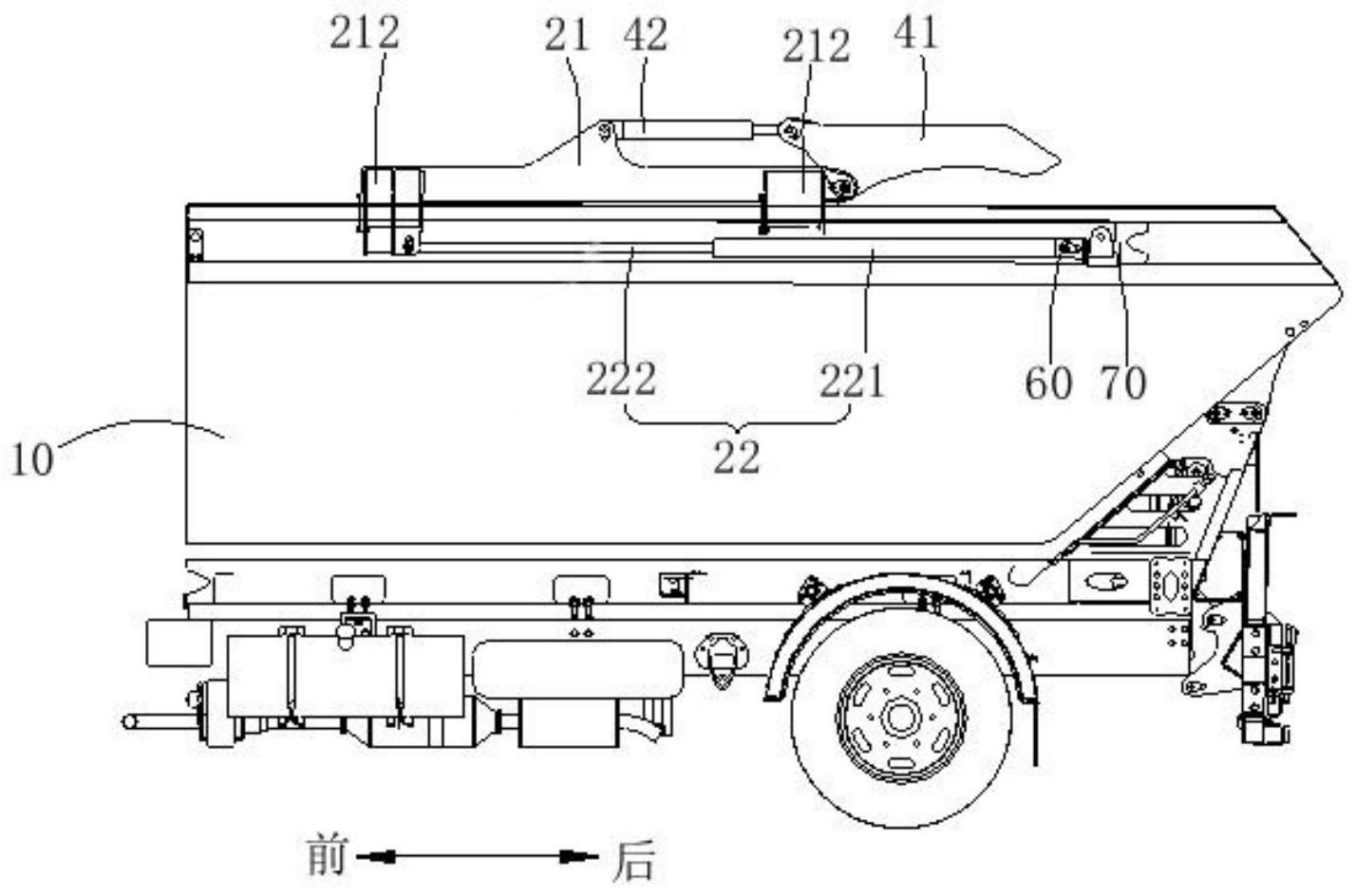
6.根据权利要求1至5中任意一项所述的垃圾箱,其特征在于,所述刮板机构(40)包括刮板(41)和刮板油缸(42),所述刮板(41)与所述滑板架(21)的后侧枢转连接,所述刮板油缸(42)设于所述滑板架(21)上且伸缩端与所述刮板(41)的前侧铰接,所述刮板油缸(42)用于驱动所述刮板(41)朝向或远离所述垃圾填入口(90)摆动,以使所述刮板(41)进行刮合摆动或者密封盖合所述垃圾填入口(90)。
7.根据权利要求1至5中任意一项所述的垃圾箱,其特征在于,所述垃圾箱本体(10)上还设有沿前后方向延伸的导轨(30),所述滑板架(21)包括滑板以及沿宽度方向安装于所述滑板两侧的滑块(212)组件,每组所述滑块(212)组件均包括分别沿长度方向布置于所述滑板的两端的两个滑块(212),每个所述滑块(212)和所述导轨(30)滑动接触配合。
8.根据权利要求7所述的垃圾箱,其特征在于,所述滑板油缸(22)包括缸筒(221)和滑动设于所述缸筒(221)内的所述活塞杆(222),所述活塞杆(222)的前端与位于前侧的所述滑块(212)铰接,所述缸筒(221)的底端通过安装座(70)安装于所述垃圾箱本体(10)上。
9.根据权利要求8所述的垃圾箱,其特征在于,所述缸筒(221)背离所述活塞杆(222)的一端安装有连接板(60),所述安装座(70)包括依次连接的:
10.根据权利要求7所述的垃圾箱,其特征在于,位于前侧的所述滑块(212)的底部所在的水平面低于位于后侧的所述滑块(212)的底部所在的水平面。
11.一种垃圾箱的垃圾压填控制方法,其特征在于,应用于根据权利要求1至10中任意一项所述的垃圾箱中,所述垃圾箱的垃圾压填控制方法的步骤包括:
12.根据权利要求11所述的垃圾箱的垃圾压填控制方法,其特征在于,所述垃圾箱的垃圾压填控制方法的步骤还包括:
13.根据权利要求11所述的垃圾箱的垃圾压填控制方法,其特征在于,所述实时获取所述活塞杆(222)的当前位置信息的步骤包括:
14.根据权利要求11所述的垃圾箱的垃圾压填控制方法,其特征在于,所述垃圾箱的垃圾压填控制方法还包括:
15.一种环卫机械,其特征在于,包括如权利要求1至10中任意一项所述的垃圾箱。
技术总结
本发明提供一种垃圾箱、垃圾压填控制方法及环卫机械,该垃圾箱包括垃圾箱本体、滑板机构、刮板机构和控制单元;垃圾箱本体上开设有垃圾填入口;滑板机构包括滑板架以及用于驱动滑板架沿前后移动的滑板油缸;刮板机构设于滑板架上;控制单元配置为:获取滑板油缸的活塞杆的当前位置信息;根据当前位置信息判断滑板架是否到达预设垃圾压填位置;当滑板架到达预设垃圾压填位置时,控制刮板机构进行垃圾压填。本发明中的控制单元可以精确获取滑板油缸的活塞杆的位置信息,根据活塞杆的位置判断滑板架是否到达了预设垃圾压填位置,从而可以防止在垃圾压填过程中刮板刮伤垃圾箱本体。
技术研发人员:杨锋,邓凯锋,刘坚,阮帆,徐春蓉
受保护的技术使用者:长沙中联重科环境产业有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!