一种玻璃基板精准定位包装方法与流程
本发明涉及液晶玻璃基板包装,尤其涉及一种玻璃基板精准定位包装方法。
背景技术:
1、随着玻璃生产技术提升,玻璃基板尺寸加大,依赖于机器人代替通用设备搬送以提高效率。液晶玻璃基板在包装时采用的水平式包装架是用于长途运输的一种载体,为了避免输送造成偏移,包装架的台面尺寸和玻璃尺寸基本一致,完成包装后需要对包装架各面进行固定。
2、在包装过程中,包装架在更换结束后,包装架将被固定在固定玻璃包装工位位置,因为每次放置和固定状态不能完全一致,会出现1-5mm范围的误差,这样影响包装质量,造成运输过程损失,会造成包装的玻璃固定不稳定,因此,需要对包装精度进行控制。
3、传统的精度管理需要人工对各边、角的包装玻璃基板进行测量,再对机器人位置进行调整,存在以下问题:人员需要进入机器人工作区,存在安全隐患;设备需要停机作业,影响连续正常生产;包装时每张玻璃基板下面均有一层间隔纸,间隔纸遮盖包装架,人工测量无法直接对比包装后玻璃基板的实际偏移量,精度不高,并且校准效率不高。
技术实现思路
1、为解决背景技术中存在的技术问题,本发明提出一种玻璃基板精准定位包装方法。
2、本发明提出的一种玻璃基板精准定位包装方法,包括以下步骤:
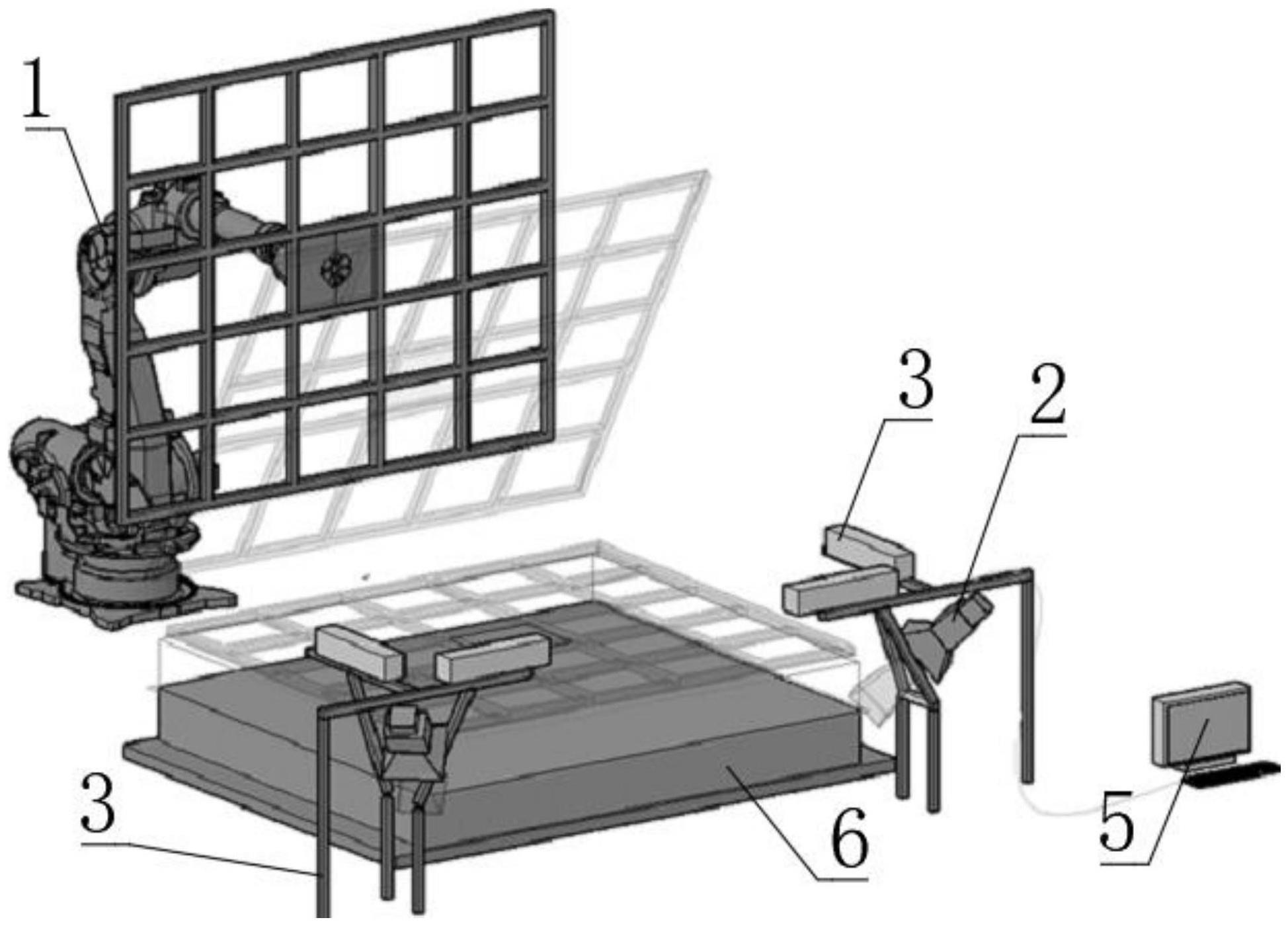
3、s1.包装架在玻璃包装工位上架完成后,视觉系统进行拍摄、图像识别和计算,获得包装架的位置数据,以及包装架相对于基准位置的第一位置偏差值数据;
4、s2.视觉系统将所述第一位置偏差值数据发送给机器人,机器人根据所述第一位置偏差值数据进行位置修正;
5、s4.机器人对第一张玻璃基板执行包装动作;
6、s5.视觉系统进行拍摄、图像识别和计算,得到第一张玻璃基板的位置数据,以及第一张玻璃基板相对于所述包装架的第二位置偏差值数据;
7、s6.根据所述第二位置偏差值数据判断是否满足包装条件,若满足包装条件,则直接进入下一步,若不满足包装条件,则视觉系统发出警报,并且将所述第二位置偏差值发送给机器人,机器人根据所述第二位置偏差值数据进行位置修正,再进入下一步;
8、s7.机器人继续对后续的玻璃基板执行包装动作,直至所述包装架满载。
9、优选地,所述视觉系统在拍摄时,摄像头对着包装架台面一条边的两个角点,摄像头镜头中心与所述角点的连线相对于水平x轴方向的平面角为θx,相对于水平y轴方向的平面角为θy,相对于竖直z轴方向的平面角为θz。
10、优选地,所述θx=θy=45°,所述θz在45°-60°。
11、优选地,所述θx=θy=θz=0°。
12、优选地,所述基准位置的确定方法为:机器人调整放板中心位置与包装架的台面中心重合,机器人放板时不作位置修正,正好将玻璃基板中心放置在包装架台面的中心位置,视觉系统以该包装架台面一条边的两角点作为镜头基准中心,进行拍摄、图像识别和计算,获得所述两角点的位置数据,确定为基准位置。
13、优选地,所述机器人进行位置修正时,根据x轴偏差值进行x轴同向偏移,根据y轴偏差值进行y轴同向偏移,根据角度变化量进行同向旋转相同角度偏移。
14、优选地,所述方法还包括:视觉系统进行拍摄、图像识别和计算,获得玻璃基板相对于包装间隔纸的第三位置偏差值数据。
15、优选地,所述机器人对玻璃基板执行包装动作的方法是:包装间隔纸铺设在固定的玻璃加纸工位,玻璃基板摆放在包装间隔纸上,机器人将玻璃加纸工位的玻璃基板连同包装间隔纸一起搬运到所述包装架上。
16、优选地,所述视觉系统是通过数据传输接口或plc将数据发送给机器人的。
17、本发明的玻璃基板精准定位包装方法,通过视觉系统直观判定所有包装架位置变化,精确判定偏差范围,提供机器人修正位置,使得机器人动作能够在包装放板前,确定第一张玻璃最新位置和角度,以后的包装位置沿用第一张玻璃偏差量计算完成,直到最终包装架完成。该方法相较于传统人工进入机器人工作区内检查更为方便,同时,视觉系统判定包装架位置和玻璃实际位置的相对偏移,从而提高了校准包装精度,能够提高调整效率。
技术特征:
1.一种玻璃基板精准定位包装方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的玻璃基板精准定位包装方法,其特征在于,所述视觉系统在拍摄时,摄像头对着包装架台面一条边的两个角点,摄像头镜头中心与所述角点的连线相对于水平x轴方向的平面角为θx,相对于水平y轴方向的平面角为θy,相对于竖直z轴方向的平面角为θz。
3.根据权利要求2所述的玻璃基板精准定位包装方法,其特征在于,所述θx=θy=45°,所述θz在45°-60°。
4.根据权利要求2所述的玻璃基板精准定位包装方法,其特征在于,所述θx=θy=θz=0°。
5.根据权利要求3或4所述的玻璃基板精准定位包装方法,其特征在于,所述基准位置的确定方法为:机器人调整放板中心位置与包装架的台面中心重合,机器人放板时不作位置修正,正好将玻璃基板中心放置在包装架台面的中心位置,视觉系统以该包装架台面一条边的两角点作为镜头基准中心,进行拍摄、图像识别和计算,获得所述两角点的位置数据,确定为基准位置。
6.根据权利要求5所述的玻璃基板精准定位包装方法,其特征在于,所述机器人进行位置修正时,根据x轴偏差值进行x轴同向偏移,根据y轴偏差值进行y轴同向偏移,根据角度变化量进行同向旋转相同角度偏移。
7.根据权利要求1所述的玻璃基板精准定位包装方法,其特征在于,还包括:视觉系统进行拍摄、图像识别和计算,获得玻璃基板相对于包装间隔纸的第三位置偏差值数据。
8.根据权利要求1所述的玻璃基板精准定位包装方法,其特征在于,所述机器人对玻璃基板执行包装动作的方法是:包装间隔纸铺设在固定的玻璃加纸工位,玻璃基板摆放在包装间隔纸上,机器人将玻璃加纸工位的玻璃基板连同包装间隔纸一起搬运到所述包装架上。
9.根据权利要求1所述的玻璃基板精准定位包装方法,其特征在于,所述视觉系统是通过数据传输接口或plc将数据发送给机器人的。
技术总结
本发明公开了一种玻璃基板精准定位包装方法,通过视觉系统直观判定所有包装架位置变化,精确判定偏差范围,提供机器人修正位置,使得机器人动作能够在包装放板前,确定第一张玻璃最新位置和角度,以后的包装位置沿用第一张玻璃偏差量计算完成,直到最终包装架完成。该方法相较于传统人工进入机器人工作区内检查更为方便,同时,视觉系统判定包装架位置和玻璃实际位置的相对偏移,从而提高了校准包装精度,能够提高调整效率。
技术研发人员:都康,程肇琦,周文强,柏冬冬,唐园梦
受保护的技术使用者:彩虹(合肥)液晶玻璃有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!