一种非对心式智能立体旋转存储机器的存储方法
本发明涉及智慧仓储领域,具体是一种非对心式智能立体旋转存储机器的存储方法。
背景技术:
1、随着互联网和人工智能的发展,智能化和信息化技术在智慧仓储中被广泛应用,所有核心环节都变得更加智能,越来越多的智慧工厂被建立起来,物流仓储自动化技术正在发生变革。
2、传统的仓储环节主要包括货物入库、在库管理和出库作业三个环节,需要用到叉车、agv小车和人力等,工作效率相对较低。由于叉车和agv小车每次能装载的货物单元只有一个,针对频繁出入库的货物来说,会使搬运次数大大增加,也增加了工人和设备的往返次数。
3、基于上述问题可知,由于目前智慧工厂的快速发展,传统仓储装备的弊端也逐渐展现出来,针对频繁出入库的货物来说,急需一种更加智能化多载位的出入库存储机器,以节省人力、提高作业效率,从而适应智能仓储的需求。
技术实现思路
1、本发明的目的是克服上述背景技术中的不足,提供一种非对心式智能立体旋转存储机器的存储方法,该方法应能快速完成货物的出入库工作,从而满足智能仓储的需求。
2、本发明的技术方案是:
3、一种非对心式智能立体旋转存储机器的存储方法,包括入库方法和出库方法;
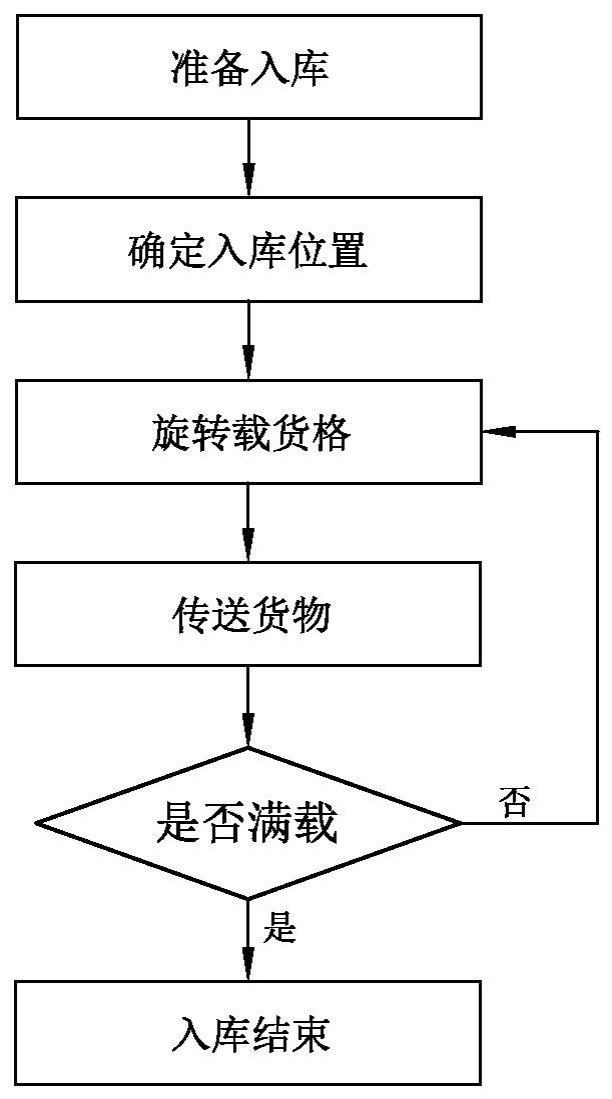
4、所述入库方法包括以下步骤:
5、s1.1、准备入库:存储机器行驶至入库月台;
6、s1.2、确定入库位置:确定可存储待入库货物的载货格;
7、s1.3、旋转载货格:将可存储待入库货物的载货格旋转到入库位置,使载货格输送带与货物传送带齐平;
8、s1.4、传送货物:载货格输送带与货物传送带启动,将货物传送带上的待入库货物传送到载货格输送带上;
9、s1.5、判断是否满载;若整机未满载,返回步骤s1.2,进行下一件货物的入库;若整机满载,进入步骤s1.6;
10、s1.6、入库结束:存储机器驶离入库月台并整机入库存储;
11、所述出库方法包括以下步骤:
12、s2.1、准备出库:存储机器行驶至出库月台;
13、s2.2、确定出库位置:根据先进先出的顺序原则,确定存储待出库货物的载货格;
14、s2.3、旋转载货格:将存储待出库货物的载货格旋转到出库位置,使载货格输送带与货物传送带齐平;
15、s2.4、传送货物:载货格输送带与货物传送带启动,将载货格输送带上的待出库货物传送到货物传送带上;
16、s2.5、判断是否空载:若整机未空载,返回步骤s2.2,进行下一件货物的出库;若整机空载,进入步骤下s2.6;
17、s2.6、出库结束:存储机器驶离出库月台;
18、所述存储机器包括机架、设置在机架上的若干载货格、带动载货格环绕机架运动的驱动机构、设置在机架底部的行走机构、控制柜。
19、所述步骤s1.2中,确定可存储待入库货物的载货格的方法包括:排除已装有货物的载货格,计算空载的载货格到货物传送带的货物出口的横向距离与纵向距离之和作为旋转距离,确定旋转距离最小的载货格作为待入库货物的载货格。
20、所述机架上设有布置在载货格两侧的一对轨道,轨道前后错开一定距离,轨道上可滑动地定位若干滑块,每个载货格同时可转动地定位在各轨道的一个滑块上;所述驱动机构包括驱动电机以及用于依次向载货格传递驱动电机动力的齿轮传动机构、链条传动机构、连杆传动机构;所述载货格上设有重量传感器以及输送带机构;所述控制柜电连接驱动机构、重量传感器、输送带机构、行走机构。
21、所述齿轮传动机构包括与驱动电机输出轴连接的第一齿轮传动轴、两条第二齿轮传动轴、与第一齿轮传动轴固定的第一齿轮、与第二齿轮传动轴固定并与第一齿轮啮合的第二齿轮。
22、所述链条传动机构包括可转动地定位在机架上的上推动盘与下推动盘以及装套在上推动盘与下推动盘上的链条;所述机架的两侧各设有一个链条传动机构,两条第二齿轮传动轴分别与两侧链条传动机构的下推动盘连接。
23、所述连杆传动机构包括连接同一侧滑块与链条的若干连杆分支;所述连杆分支包括可转动地铰接在链条上的第一连杆、两端分别可转动地定位在第一连杆与滑块上的第二连杆;所述链条与每个滑块之间通过两条连杆分支连接。
24、所述轨道的外圆周面与内圆周面上各设有一对滑槽,滑块上设有两对可沿着滑槽滚动的滑轮。
25、所述输送带机构包括输送滚筒、输送带与输送电机。
26、所述行走机构包括设置在机架底部的舵轮和随动轮。
27、所述控制柜电连接驱动电机、重量传感器、输送电机、舵轮。
28、本发明的有益效果是:
29、本发明通过驱动机构带动载货格沿着非对心式的环形轨道运动,整体结构可靠,运行稳定,载货格在移动时始终保持水平姿态,整机也能自行移动到指定位置,对于周转速度较快、频繁出入库的货物,直接在载货格上存储,省去了再入库的流程,具有多载位存储、智能高效、结构简单、载位数量多、人工成本低的优点,非常适合推广应用。
技术特征:
1.一种非对心式智能立体旋转存储机器的存储方法,包括入库方法和出库方法;
2.根据权利要求1所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述步骤s1.2中,确定可存储待入库货物的载货格的方法包括:排除已装有货物的载货格,计算空载的载货格到货物传送带的货物出口的横向距离与纵向距离之和作为旋转距离,确定旋转距离最小的载货格作为待入库货物的载货格。
3.根据权利要求2所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述机架上设有布置在载货格两侧的一对轨道(6),轨道前后错开一定距离,轨道上可滑动地定位若干滑块(5-3),每个载货格同时可转动地定位在各轨道的一个滑块上;所述驱动机构包括驱动电机(2-5)以及用于依次向载货格传递驱动电机动力的齿轮传动机构、链条传动机构、连杆传动机构;所述载货格上设有重量传感器以及输送带机构;所述控制柜电连接驱动机构、重量传感器、输送带机构、行走机构。
4.根据权利要求3所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述齿轮传动机构(2)包括与驱动电机输出轴连接的第一齿轮传动轴(2-1)、两条第二齿轮传动轴(2-2)、与第一齿轮传动轴固定的第一齿轮(2-3)、与第二齿轮传动轴固定并与第一齿轮啮合的第二齿轮(2-4)。
5.根据权利要求4所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述链条传动机构(3)包括可转动地定位在机架上的上推动盘(3-1)与下推动盘(3-2)以及装套在上推动盘与下推动盘上的链条(4);所述机架的两侧各设有一个链条传动机构,两条第二齿轮传动轴分别与两侧链条传动机构的下推动盘连接。
6.根据权利要求5所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述连杆传动机构(5)包括连接同一侧滑块与链条的若干连杆分支;所述连杆分支包括可转动地铰接在链条上的第一连杆(5-1)、两端分别可转动地定位在第一连杆与滑块上的第二连杆(5-2);所述链条与每个滑块之间通过两条连杆分支连接。
7.根据权利要求6所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述轨道的外圆周面与内圆周面上各设有一对滑槽(6-1),滑块上设有两对可沿着滑槽滚动的滑轮(5-3-1)。
8.根据权利要求7所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述输送带机构包括输送滚筒、输送带(7-1)与输送电机(8)。
9.根据权利要求8所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述行走机构包括设置在机架底部的舵轮(1-1-1)和随动轮(1-1-2)。
10.根据权利要求9所述的一种非对心式智能立体旋转存储机器的存储方法,其特征在于:所述控制柜电连接驱动电机、重量传感器、输送电机、舵轮。
技术总结
本发明涉及智慧仓储领域,目的是提供一种非对心式智能立体旋转存储机器的存储方法,该方法应能快速完成货物的出入库工作,从而满足智能仓储的需求。技术方案是一种非对心式智能立体旋转存储机器的存储方法,包括入库方法和出库方法;所述入库方法包括以下步骤:S1.1、准备入库;S1.2、确定入库位置;S1.3、旋转载货格;S1.4、传送货物;S1.5、判断是否满载;S1.6、入库结束;所述出库方法包括以下步骤:S2.1、准备出库;S2.2、确定出库位置;S2.3、旋转载货格;S2.4、传送货物;S2.5、判断是否空载;S2.6、出库结束。
技术研发人员:宁方华,贾欣裕,李仁旺,周恒
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!