一种自适应移动吸粮前端移栽机的制作方法
本发明涉及无轨运输车辆机械式谷物输送器领域。具体涉及一种自适应移动吸粮前端移栽机。
背景技术:
1、目前,随着技术的逐渐成熟和社会进步,高强度体力劳动逐渐被人工智能技术所取代,粮食存储机构人员结构的老龄化趋于严重,能够从事简单而突发式体力劳动的人员越来越少。然而,粮食输送机械设备仍然以简单粗暴的皮带式输送为主、以人工移动调整为主、以人员 6-8人左右小群体合作工作群为主。面对科技水平不断提升的现代,农业基础设施的建设刻不容缓、社会老龄化面临新的挑战,机械自动化的变革、环境保护、人员结构的调整亟需农机智能机械的快速发展借以弥补人员不足的窘境。本发明基于无人驾驶技术、视觉位置判断、自适应技术的结合实现粮食进、出仓与运粮车自动对接整机具有无损吸、送料、无人值守、快速高效的优点,为粮食进仓存储、出仓作业、操作提供安全可靠的保障。解除了体力劳动人力消耗并消除因人参与而导致的安全事故。
技术实现思路
1、本发明针对现有粮食储备技术的不足,解决的技术问题是:
2、提供一种自适应移动吸粮前端移栽机。该自适应移动吸粮前端移栽机机动性强、效率高、低污染、结构紧凑、操作灵活、运动范围大、执行精度高。无人参与现场作业,降低安全危险,可实现随粮食现状而变化保证与粮面的贴合。
3、本发明解决所述技术问题的技术方案是:
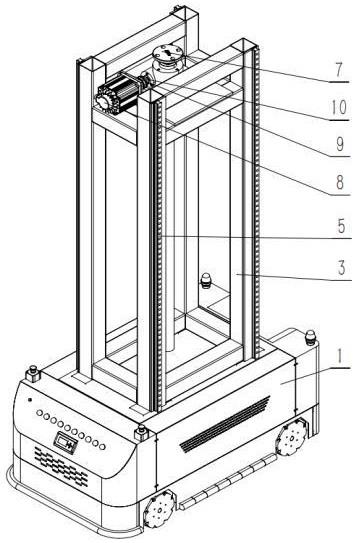
4、发明一种自适应移动吸粮前端移栽机。包括自动导引运输车、升降框架、水平行走、吸粮管路、自适应软管、视觉系统六大部分组成。其特征在于:所述自动导引运输车承载升降框架、水平行走、吸粮管路、自适应软管、视觉系统,按需求自行到达运粮车车体侧面适当距离;
5、所述视觉端采用视觉分析对比的方式确定工作位置;
6、所述升降框架携带水平行走、吸粮管路、自适应软管、视觉系统将水平行走、吸粮管路、自适应软管、视觉系统提升到超出运粮车粮面;
7、所述水平行走通过动力系统将吸粮管路、自适应软管、视觉系统推到运粮车粮面正上端;
8、所述自适应软管前端吸粮口根据视觉系统分析,自适应垂落于粮食面协助主机设备开始吸粮作业。
9、本发明具有如下优点:
10、通过视觉系统的定位研判确定吸粮口空间位置,并应用自适应的方式实现辅助高效定位,精确吸粮作业的前端设备。从而大大降低人员参与,提高设备机动性,运动范围大、位置定位精度高、适应能力强。
技术特征:
1.一种自适应移动吸粮前端移栽机,包括自动导引运输车、升降框架、水平行走、吸粮管路、自适应软管、视觉系统六大部分组成。其特征在于:所述自动导引运输车承载升降框架、水平行走、吸粮管路、自适应软管、视觉系统,按需求自行到达运粮车车体侧面适当距离。
2.根据权利要求1所述的装置,其特征在于所述视觉端采用视觉分析对比的方式确定工作位置。
3.根据权利要求1所述的装置,其特征在于所述升降框架携带水平行走、吸粮管路、自适应软管、视觉系统将水平行走、吸粮管路、自适应软管、视觉系统提升到超出运粮车粮面。
4.根据权利要求1所述的装置,其特征在于所述水平行走通过动力系统将吸粮管路、自适应软管、视觉系统推到运粮车粮面正上端。
5.根据权利要求1所述的装置,其特征在于所述自适应软管前端吸粮口根据视觉系统分析,自适应垂落于粮食面协助主机设备开始吸粮作业。
6.根据权利要求1所述的装置,其特征在于所述视觉系统的定位研判确定吸粮口空间位置,并应用自适应的方式实现辅助高效定位,精确吸粮作业的前端设备。
7.根据权利要求1所述的装置,其特征在于所述视觉系统研判工作口粮食已无法吸取时反馈信息,指挥自动导引运输车移动到另一吸粮位置,直至粮车的全部粮食被吸取。
8.根据权利要求1所述的装置,其特征在于吸粮端自适应软管收缩,吸粮端浮动吸粮系统撤出运粮车储粮箱体;进行下一辆运粮车吸粮作业。
技术总结
本发明公开了一种自适应移动吸粮前端移栽机利用视觉定位系统及自适应定位粮食盛放位置,利用负压风机的负压将粮食快速吸收输送到指定地点的无人移栽机。主要针对大型无人工参与设备定位搭接的远距离输送,解决繁琐、负载较大、协同作业、及保障人员安全等方面而研制,并杜绝因其他意外因素而导致操作人员受伤及跌落的事故发生;此设计在高危领域及降低劳动强度等方面具备一定的安全优势。本发明公开了一种利用视觉定位系统及自适应定位粮食盛放位置,利用负压风机的负压将粮食快速吸收输送到指定地点的无人移栽机。主要针对大型无人工参与设备定位搭接的远距离输送,解决繁琐、负载较大、协同作业、及保障人员安全等方面而研制,并杜绝因其他意外因素而导致操作人员受伤及跌落的事故发生;此设计在高危领域及降低劳动强度等方面具备一定的安全优势。
技术研发人员:石雷,章文旎
受保护的技术使用者:北京神州良实科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!