一种堆垛机行走定位结构及其定位方法与流程
本发明涉及智能取料系统,特别是涉及堆垛机行走定位结构及其定位方法。
背景技术:
1、目前全球生产制作堆垛机的厂家,从国外的德马泰克、瑞士格等知名品牌到国内的音飞、中鼎等一线公司,堆垛机的行走定位方式以激光定位系统、条形码定位系统为主,激光定位系统是在堆垛机运行轨道端头竖直安装一块反光板,安装于堆垛机上的光学测距传感器发射出来的激光垂直照射在反光板上,实时测量传感器至反光板的距离,反馈给堆垛机,以计算堆垛机的实时位置;条形码定位系统,是沿着堆垛机运行的轨道,在一侧安装条码带,安装于堆垛机上的条形码识别传感器通过识别条码带上的条形码,计算当前对应的位置值,反馈给堆垛机,以计算堆垛机的当前位置。通过以上方式获取到堆垛机行走方向的位置数值,实现行走定位。
2、上述两种测距定位方式结构设计简单,使用方便,但是实际使用时对现场环境要求比较高,一些特殊的场景无法满足使用条件。比如室外有尘雾或者凝露环境,光线无法穿透,光学测距传感器无法正常工作。在某些低温(<-30℃)或者高温(>50℃)场景下,上述两种测距传感器也会因为超出工作温度范围而出现故障停机风险。另外还有石油化工等行业对设备具有防爆等级要求,此时上述两种传感器无法满足防爆要求,不能使用。
3、现有的通过编码器进行定位的堆垛机构,如中国专利【cn206757381u】和【cn115097873a】都是通过编码器实现定位测距的功能,但编码器测距存在的问题,一个是轮体打滑,另一个是轮体磨损导致的位置计算错误。以上问题在现有技术未得到完全解决。
技术实现思路
1、本发明目的是要提供一种堆垛机行走定位结构及其定位方法,解决了现有堆垛机中使用编码器定位难以消除行走轮磨损所带来的误差。
2、为达到上述目的,本发明采用的技术方案是:
3、本发明提供了一种堆垛机行走定位结构,包括
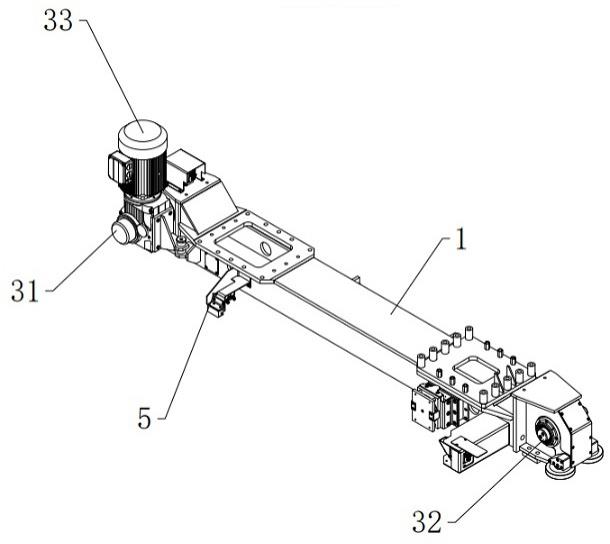
4、行走轮,所述行走轮设置在堆垛机下端,所述行走轮包括主动轮和与之联动的从动轮,所述主动轮的旋转轴上连接有驱动电机;
5、编码器,其设置在所述从动轮的旋转轴上并用于检测其动作信息;
6、控制器,所述控制器的输入端与编码器的输出端连接,接收所述编码器的信息数据,所述控制器的输出端与驱动电机的输入端相连接;
7、磁簧开关,其设置在堆垛机侧壁,所述堆垛机的行走轨道的两端装设有具有磁场的磁性体,所述磁簧开关的输出端与控制器的输入端连接。
8、优选地,所述磁簧开关的输入端和控制器的输出端的连接方式为干连接,所述编码器的输出端与控制器的输入端的连接方式为通讯连接。
9、优选地,所述编码器为绝对值编码器,且所述编码器的脉冲为四倍频脉冲。一种堆垛机行走定位方法,至少包括:
10、s1、初次使用前,记录从动轮初始直径r0,使堆垛机以恒定速度在行走轨道的具有磁性体的两端运行进行位置校验,并将放置磁性体的位置分别记录为:a点位置xa0和b点位置xb0,并算出a点位置xa0和b点位置xb0间的初始差值l0;
11、s2、将轨道一侧货架的位置数据进行计算并记录,以a点位置作为基点,a点到第一列货架的距离为x1,到第二列的距离为x2…到第n列距离为xn;
12、s3、使用过程中,堆垛机每隔固定周期进行一次位置校验,以恒定速度在轨道上运行,控制器记录经过a和b点时显示的数值xan和xbn,并计算此时a、b两点间的距离ln;
13、s4、设定原点偏差范围w0,即| xa0-xan|的数值不大于w0,则不对a点位置数据进行调整,反之若| xa0-xan|的数值大于w0,则当堆垛机在a处位置时,将此时控制器显示的数值调整为xa0;
14、s5、设定距离偏差范围w1,当| ln-l0|的数值不大于w1,则控制器默认堆垛机行走轮未出现磨损情况,反之若当| ln-l0|的数值大于w1,则控制器则认为堆垛机行走轮出现磨损问题;并且根据ln和l0确定偏差率σ=ln/l0,且将轨道一侧货架的位置数据进行重新标注并再次记录,以a点位置作为基点, a点到第一列货架的距离为x11= x1*(1+σ)到第二列货架的距离x12= x2*(1+σ)…到第n列货架距离为x1n= xn*(1+σ);
15、s6、计算出行走轮直径的磨损量m1,并限定磨损量的偏差范围m0,并进行对比,若m1大于m0,则进行更换行走轮,反之则进行下一步;
16、s7、控制器根据重新计算的数据x11,x12,,,x1n,通过从动轮的初始直径重新计算出从动轮第一列货架、第二列货架、、第n列货架位置处需转圈数n1、n2,,,nn并将该信息传递至驱动电机。
17、优选地,s6中的计算方法为,所述s3中的ln除以从动轮的周长等于由a处至b处从动轮所转圈数n0,所述s5中| ln-l0|的值除以所述n0等于每转一圈出现的偏差w2,所述w2除以圆周率等于从动轮初始直径的磨损量m。
18、由于上述技术方案运用,本发明与现有技术相比具有下列优点:
19、本发明堆垛机行走定位结构及其定位方法,
20、1、行走采用编码器定位,且根据轨道堆垛机的特性,编码器安装于从动轮侧,避免因为行走轮打滑出现行走位置计算错误
21、2、下横梁安装磁簧开关,既能作为原点检测,也能作为行走轮磨损误差检测,为堆垛机的准确、稳定运行提供保障;
22、3、由控制器通过编码器反馈的数值对堆垛机行走位置的计算以及原点纠偏、行走轮磨损检测和及时对货架数据重新调整。
技术特征:
1.一种堆垛机行走定位结构,其特征在于,包括
2.根据权利要求1所述的一种堆垛机行走定位结构,其特征在于:所述磁簧开关的输入端和控制器的输出端的连接方式为干连接,所述编码器的输出端与控制器的输入端的连接方式为通讯连接。
3.根据权利要求1所述的一种堆垛机行走定位结构,其特征在于:所述编码器为绝对值编码器,且所述编码器的脉冲为四倍频脉冲。
4.根据权利要求1所述的一种堆垛机行走定位方法,其特征在于:至少包括:
5.根据权利要求4所述的一种堆垛机行走定位方法,其特征在于:所述s6中计算行走轮磨损量的方法为,所述s3中的ln除以从动轮的周长等于由a处至b处从动轮所转圈数n0,所述s5中| ln-l0|的值除以所述n0等于每转一圈出现的偏差w2,所述w2除以圆周率等于从动轮直径的磨损量m1。
技术总结
本发明涉及堆垛机行走定位结构及其定位方法,定位结构包括行走轮,编码器,控制器和磁簧开关,行走轮设置在堆垛机下端,行走轮包括主动轮和从动轮,主动轮的旋转轴上连接有驱动电机;编码器设置在从动轮的旋转轴上并用于检测其动作信息;控制器的输入端与编码器的输出端连接,所述控制器的输出端与驱动电机的输入端相连接,堆垛机的行走轨道的两端装设有具有磁场的磁性体,行走采用编码器定位,且根据轨道堆垛机的特性,编码器安装于从动轮侧,避免因为行走轮打滑出现行走位置计算错误,磁簧开关,既能作为原点检测,也能作为行走轮磨损误差检测,为堆垛机的准确、稳定运行提供保障,控制器通过逻辑算法实现对堆垛机行走位置的计算以及原点纠偏、行走轮磨损检测和库位数据调整。
技术研发人员:钱波,余国俊
受保护的技术使用者:立涞自动化科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!