一种工业机器人安装维护辅助提升装置的制作方法
本发明涉及工业机器人,尤其涉及一种工业机器人安装维护辅助提升装置。
背景技术:
1、工业机器人是一种用于在工业生产线上执行各种自动化操作的机器设备。它能够代替人类完成危险、重复或高精度的任务,提高生产效率、质量和安全性。在安装维护过程中,通常是使用吊车和绳索将工业机器人抬升起来,然后移动至安装地或者维修地,而在移动过程中工业机器人仅受绳索的限位,因此容易产生晃动和倾倒,进而非常容易导致工业机器人掉落损坏。
2、因此,需要设计一种能够带动工业机器人平稳提升移动的工业机器人安装维护辅助提升装置。
技术实现思路
1、为了克服通过吊车和绳索将工业机器人抬升起来,容易产生晃动和倾倒,进而非常容易导致工业机器人掉落损坏的缺点,本发明的目的是提供一种能够带动工业机器人平稳提升移动的工业机器人安装维护辅助提升装置。
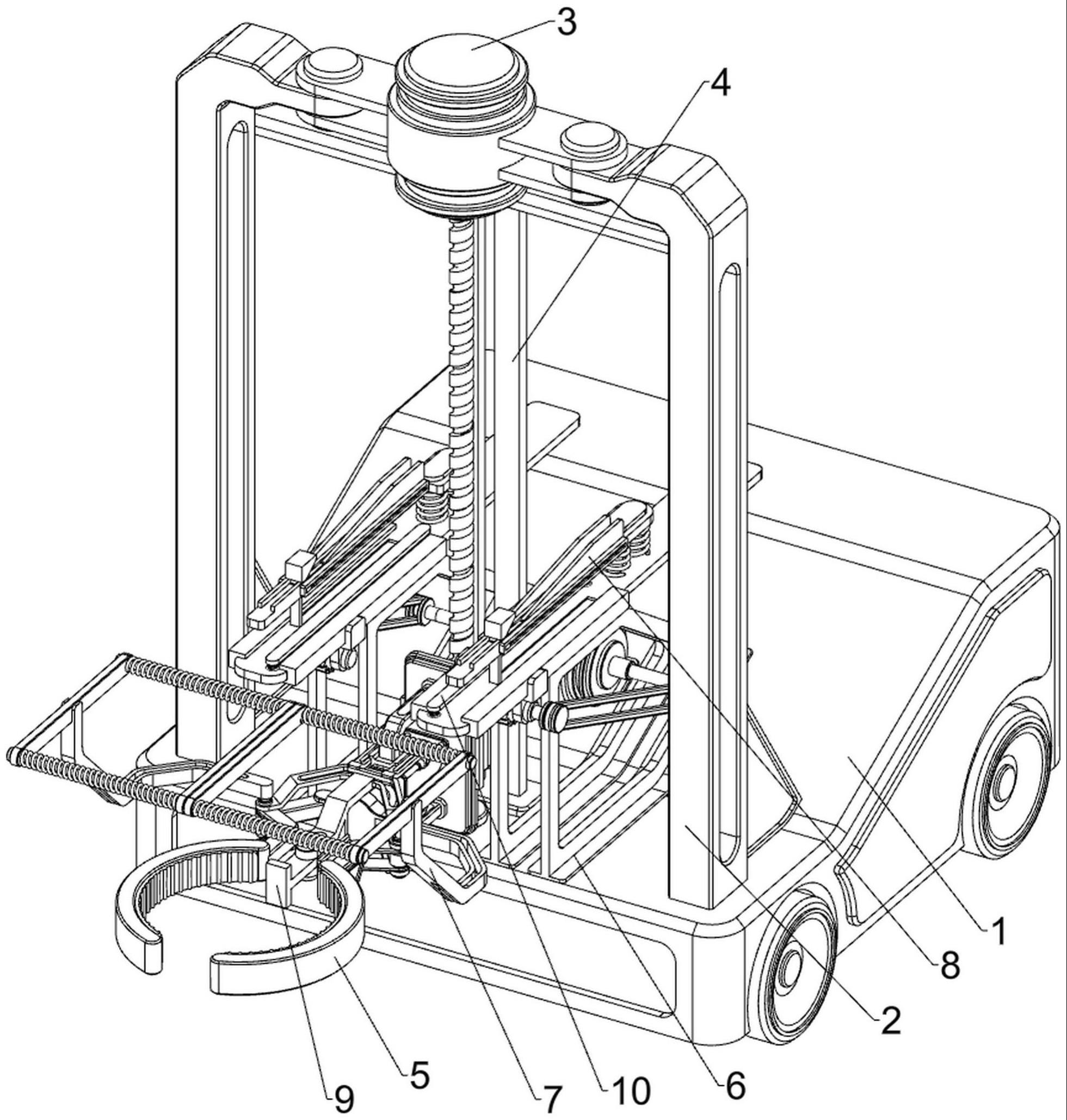
2、一种工业机器人安装维护辅助提升装置,包括有移动车、第一安装架、第一驱动组件、限位槽架、提升机构和托起机构,移动车的左部上侧连接有第一安装架,第一安装架与移动车之间连接有第一驱动组件,第一驱动组件包括有第一驱动电机和丝杆,第一安装架的上侧连接有第一驱动电机,第一驱动电机的输出轴上连接有丝杆,丝杆的下侧与移动车转动式相连接,移动车的左部上侧连接有限位槽架,限位槽架上设有用于带动工业机器人提升的提升机构,移动车上设有用于承托工业机器人的托起机构。
3、此外,特别优选的是,提升机构包括有移动架、液压缸、第一推动件和第一夹紧件,限位槽架上滑动式连接有移动架,移动架与丝杆通过螺纹相连接,移动架上安装有液压缸,液压缸的伸缩端上连接有第一推动件,移动架的左侧前后对称的转动式连接有第一夹紧件,第一夹紧件均与第一推动件转动并滑动式相连接;通过控制液压缸带动第一推动件进行移动,进而推动第一夹紧件旋转实现夹紧工业机器人,第一驱动组件运作会带动移动架向上移动,进而带动工业机器人提升起来。
4、此外,特别优选的是,托起机构包括有放置架、放置板、齿轮和第二驱动组件,移动车的额前后两部均连接有放置架,放置架的上侧均滑动式连接有放置板,放置板的底部均开有齿纹,放置架的左部上侧均转动式连接有齿轮,齿轮与同侧放置板上的齿纹啮合,移动车的中部安装有第二驱动组件,第二驱动组件与齿轮相连接,第二驱动组件包括有双轴电机、皮带轮和皮带,双轴电机的前后两侧输出轴上均连接有皮带轮,齿轮上也均连接有皮带轮,前侧的两个和后侧的两个皮带轮之间均绕接有皮带,通过启动第二驱动组件会通过齿轮与齿纹啮合,带动放置板向左移动对工业机器人进行承托。
5、此外,特别优选的是,还包括有防转动机构,防转动机构包括有连接架、第二夹紧件和第一弹簧,第一夹紧件的上侧均连接有连接架,连接架上均滑动式连接有第二夹紧件,第二夹紧件与相邻连接架之间均连接有左右两个第一弹簧,在第一夹紧件旋转时,还会带动连接架和第二夹紧件旋转,第二夹紧件能够夹紧工业机器人的关节臂。
6、此外,特别优选的是,还包括有固定机构,固定机构包括有导向柱、压紧件、第二弹簧、第二推动件、滑动件和第三弹簧,放置板的上侧均连接有导向柱,导向柱上滑动式连接有压紧件,压紧件与放置板之间连接有左右两个第二弹簧,放置架的左右上侧连接有第二推动件,第二推动件上滑动式连接有滑动件,滑动件与压紧件滑动式相连接,滑动件与压紧件之间连接有第三弹簧;在放置板向左移动至工业机器人底部时,还会通过导向柱带动压紧件向左移动,使得工业机器人底部位于压紧件和放置板之间,同时压紧件向前移动时,第二推动件会与压紧件接触,进而推动压紧件向下移动。
7、此外,特别优选的是,还包括有对位机构,对位机构包括有第二安装架、对位件和第四弹簧,移动架上连接有第二安装架,第二安装架的左侧滑动式连接有对位件,对位件与第二安装架之间连接有第四弹簧。
8、此外,特别优选的是,还包括有缓冲机构,缓冲机构包括有缓冲板和第五弹簧,放置板的上侧均连接有左右两个第五弹簧,同一放置板上的第五弹簧上侧之间均连接有缓冲板。
9、此外,特别优选的是,第一夹紧件的内侧开有防滑纹。
10、本发明具有如下优点1、本发明通过控制液压缸带动第一推动件进行移动,进而推动第一夹紧件旋转张开与合拢,进而实现夹紧工业机器人,通过控制第一驱动组件运作便会带动移动架向上移动,进而带动工业机器人提升起来,并且通过启动第二驱动组件便会通过齿轮与齿纹啮合,带动放置板向左移动对工业机器人进行承托,从而能够进一步增加稳定性,避免工业机器人滑落导致工业机器人损坏。
11、2、本发明在第一夹紧件旋转时,还会带动连接架和第二夹紧件旋转打,从而在第一夹紧件旋转夹紧时,第二夹紧件会同步旋转夹紧工业机器人的关节臂,从而能够避免工业机器人上的关节臂旋转打下,进而导致工业机器人损坏,同时有效避免伤害到周围工作人员。
12、3、本发明在放置板向左移动至工业机器人底部时,还会通过导向柱带动压紧件向左移动,此时工业机器人底部会位于压紧件和放置板之间,同时压紧件向前移动时,第二推动件会与压紧件接触,进而推动压紧件向下移动,进而使得压紧件与放置板配合将工业机器人底部固定。
13、4、本发明在对工业机器人进行夹紧时,工业机器人会先与对位件接触,从而能够对工业机器人进行对位,避免夹紧位置不准,从而使得第一夹紧件夹紧过程中导致工业机器人倾倒。
14、5、本发明在放置板向左移动承托住工业机器人时,工业机器人的底部会先落在缓冲板上,第五弹簧发生形变进行缓冲,进而能够避免工业机器人落在放置板上时,冲击过大导致放置板或者工业机器人损坏。
技术特征:
1.一种工业机器人安装维护辅助提升装置,包括有移动车(1)、第一安装架(2)、第一驱动组件(3)和限位槽架(4),移动车(1)的左部上侧连接有第一安装架(2),第一安装架(2)与移动车(1)之间连接有第一驱动组件(3),第一驱动组件(3)包括有第一驱动电机和丝杆,第一安装架(2)的上侧连接有第一驱动电机,第一驱动电机的输出轴上连接有丝杆,丝杆的下侧与移动车(1)转动式相连接,移动车(1)的左部上侧连接有限位槽架(4),其特征在于:还包括有提升机构(5)和托起机构(6),限位槽架(4)上设有用于带动工业机器人提升的提升机构(5),移动车(1)上设有用于承托工业机器人的托起机构(6)。
2.如权利要求1所述的一种工业机器人安装维护辅助提升装置,其特征在于:提升机构(5)包括有移动架(51)、液压缸(52)、第一推动件(53)和第一夹紧件(54),限位槽架(4)上滑动式连接有移动架(51),移动架(51)与丝杆通过螺纹相连接,移动架(51)上安装有液压缸(52),液压缸(52)的伸缩端上连接有第一推动件(53),移动架(51)的左侧前后对称的转动式连接有第一夹紧件(54),第一夹紧件(54)均与第一推动件(53)转动并滑动式相连接;通过控制液压缸(52)带动第一推动件(53)进行移动,进而推动第一夹紧件(54)旋转实现夹紧工业机器人,第一驱动组件(3)运作会带动移动架(51)向上移动,进而带动工业机器人提升起来。
3.如权利要求2所述的一种工业机器人安装维护辅助提升装置,其特征在于:托起机构(6)包括有放置架(61)、放置板(62)、齿轮(63)和第二驱动组件(64),移动车(1)的额前后两部均连接有放置架(61),放置架(61)的上侧均滑动式连接有放置板(62),放置板(62)的底部均开有齿纹,放置架(61)的左部上侧均转动式连接有齿轮(63),齿轮(63)与同侧放置板(62)上的齿纹啮合,移动车(1)的中部安装有第二驱动组件(64),第二驱动组件(64)与齿轮(63)相连接,第二驱动组件(64)包括有双轴电机、皮带轮和皮带,双轴电机的前后两侧输出轴上均连接有皮带轮,齿轮(63)上也均连接有皮带轮,前侧的两个和后侧的两个皮带轮之间均绕接有皮带,通过启动第二驱动组件(64)会通过齿轮(63)与齿纹啮合,带动放置板(62)向左移动对工业机器人进行承托。
4.如权利要求3所述的一种工业机器人安装维护辅助提升装置,其特征在于:还包括有防转动机构(7),防转动机构(7)包括有连接架(71)、第二夹紧件(72)和第一弹簧(73),第一夹紧件(54)的上侧均连接有连接架(71),连接架(71)上均滑动式连接有第二夹紧件(72),第二夹紧件(72)与相邻连接架(71)之间均连接有左右两个第一弹簧(73),在第一夹紧件(54)旋转时,还会带动连接架(71)和第二夹紧件(72)旋转,第二夹紧件(72)能够夹紧工业机器人的关节臂。
5.如权利要求4所述的一种工业机器人安装维护辅助提升装置,其特征在于:还包括有固定机构(8),固定机构(8)包括有导向柱(81)、压紧件(82)、第二弹簧(83)、第二推动件(84)、滑动件(85)和第三弹簧(86),放置板(62)的上侧均连接有导向柱(81),导向柱(81)上滑动式连接有压紧件(82),压紧件(82)与放置板(62)之间连接有左右两个第二弹簧(83),放置架(61)的左右上侧连接有第二推动件(84),第二推动件(84)上滑动式连接有滑动件(85),滑动件(85)与压紧件(82)滑动式相连接,滑动件(85)与压紧件(82)之间连接有第三弹簧(86);在放置板(62)向左移动至工业机器人底部时,还会通过导向柱(81)带动压紧件(82)向左移动,使得工业机器人底部位于压紧件(82)和放置板(62)之间,同时压紧件(82)向前移动时,第二推动件(84)会与压紧件(82)接触,进而推动压紧件(82)向下移动。
6.如权利要求5所述的一种工业机器人安装维护辅助提升装置,其特征在于:还包括有对位机构(9),对位机构(9)包括有第二安装架(91)、对位件(92)和第四弹簧(93),移动架(51)上连接有第二安装架(91),第二安装架(91)的左侧滑动式连接有对位件(92),对位件(92)与第二安装架(91)之间连接有第四弹簧(93)。
7.如权利要求6所述的一种工业机器人安装维护辅助提升装置,其特征在于:还包括有缓冲机构(10),缓冲机构(10)包括有缓冲板(101)和第五弹簧(102),放置板(62)的上侧均连接有左右两个第五弹簧(102),同一放置板(62)上的第五弹簧(102)上侧之间均连接有缓冲板(101)。
8.如权利要求7所述的一种工业机器人安装维护辅助提升装置,其特征在于:第一夹紧件(54)的内侧开有防滑纹。
技术总结
本发明涉及工业机器人技术领域,尤其涉及一种工业机器人安装维护辅助提升装置。本发明提供一种能够带动工业机器人平稳提升移动的工业机器人安装维护辅助提升装置。一种工业机器人安装维护辅助提升装置,包括有移动车、第一安装架等;移动车的左部上侧连接有第一安装架。本发明通过控制液压缸带动第一推动件进行移动,进而推动第一夹紧件旋转张开与合拢,进而实现夹紧工业机器人,通过控制第一驱动组件运作便会带动移动架向上移动,进而带动工业机器人提升起来,并且通过启动第二驱动组件便会通过齿轮与齿纹啮合,带动放置板向左移动对工业机器人进行承托,从而能够进一步增加稳定性,避免工业机器人滑落导致工业机器人损坏。
技术研发人员:陶阳,周冶,陶学峰
受保护的技术使用者:江西艾韦阿智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!