变节距光纤绕制设备及绕制方法与流程
本申请涉及光纤制造,尤其涉及一种变节距光纤绕制设备及绕制方法。
背景技术:
1、光纤水听器作为一种以光纤为信息传输和传感媒介的新型传感器,其核心部分是密绕光纤。密绕光纤在加工时,需要将光纤绕制在预备的骨架的圆周上。然而,大部分密绕光纤在加工时需要人工辅助,无法实现全自动化绕制光纤,且光纤绕制时的节距固定,无法调整。
2、如何解决上述问题,即提供一种能够实现自动化绕制、能够在光纤绕制时改变光纤绕制节距的变节距光纤绕制设备及绕制方法是本领域技术人员需要考虑的。
技术实现思路
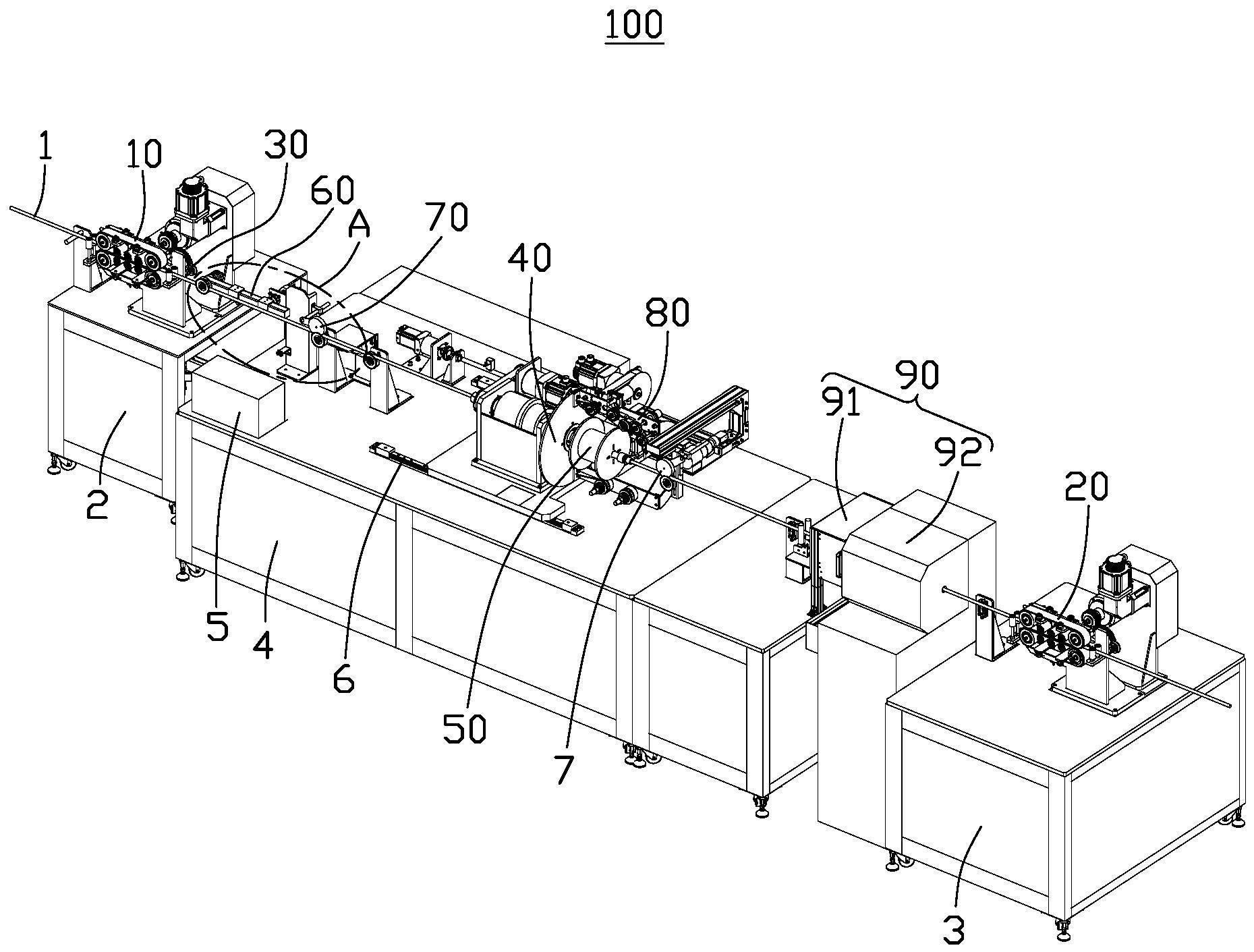
1、本申请实施例提供一种变节距光纤绕制设备,包括:
2、第一牵引装置,用于牵引骨架的一端移动;
3、第二牵引装置,沿所述骨架牵引方向间隔设于所述第一牵引装置的一侧,用于牵引所述骨架的另一端移动;
4、骨架长度检测装置,设于所述第一牵引装置与所述第二牵引装置之间,用于检测所述骨架的移动距离;
5、绕线装置,设于所述骨架长度检测装置远离所述第一牵引装置的一侧,并可绕所述骨架转动,用于牵引光纤缠绕所述骨架;
6、放线装置,设于所述绕线装置的一侧,用于将所述光纤牵引至所述绕线装置;
7、控制装置,所述控制装置分别与所述骨架长度检测装置、第一牵引装置、第二牵引装置及绕线装置信号连接,用于根据所述骨架长度检测装置的检测结果调整所述绕线装置的缠绕速度。
8、进一步地,所述骨架长度检测装置包括第一检测支架、第一检测轮和第一计数单元,所述第一检测支架设于所述第一牵引装置与所述绕线装置之间,所述第一检测轮可转动地安装于所述第一检测支架,所述骨架部分抵持于所述第一检测轮的外周面,所述骨架被牵引移动时,所述骨架驱动所述第一检测轮旋转,所述第一计数单元用于检测所述第一检测轮的旋转圈数。
9、进一步地,所述变节距光纤绕制设备还包括:
10、骨架张力检测装置,包括第一传感器、以及骨架张力检测轮,所述骨架张力检测轮可转动地安装于所述第一传感器的检测端,所述骨架部分抵持于所述骨架张力检测轮的外周;
11、骨架张力调节装置,包括骨架张力调节支架、可相对所述骨架张力调节支架摆动的骨架张力调节臂、可转动地安装于所述骨架张力调节臂的骨架张力调节轮、骨架张力调节驱动件以及第一角度传感器,所述骨架张力调节驱动件传动连接所述骨架张力调节臂,用于驱动所述骨架张力调节臂摆动,所述第一角度传感器用于检测所述骨架张力调节臂的摆动角度,所述骨架张力调节轮的外周面活动抵顶于所述骨架的一侧。
12、进一步地,所述第一牵引装置包括第一牵引组件、第二牵引组件和升降组件,所述第一牵引组件与所述第二牵引组件间隔设置,且分设于所述骨架的相对两侧,所述升降组件传动连接所述第一牵引组件,用于驱动所述第一牵引组件靠近或远离所述第二牵引组件。
13、进一步地,所述第一牵引组件包括第一牵引架、两个第一牵引轮和第一牵引带,两个所述第一牵引轮沿所述骨架的牵引方向间隔设置,且可转动地安装于所述第一牵引架,所述第一牵引带环绕两个所述第一牵引轮的外周设置;
14、所述第二牵引组件包括牵引驱动件、第二牵引架、两个第二牵引轮和第二牵引带,两个所述第二牵引轮沿所述骨架的牵引方向间隔设置,且可转动地安装于所述第二牵引架,所述第二牵引带环绕两个所述第二牵引轮的外周设置,所述牵引驱动件传动连接一个所述第二牵引轮,所述骨架部分夹设于所述第二牵引带与所述第一牵引带之间。
15、进一步地,所述绕线装置包括绕线驱动器和回转盘,所述回转盘供所述骨架穿过,所述绕线驱动器传动连接所述回转盘,用于驱动所述回转盘绕所述骨架转动,所述变节距光纤绕制设备还包括光纤控制装置,所述光纤控制装置固定于所述回转盘。
16、进一步地,所述光纤控制装置包括光纤张力检测组件、光纤张力调节组件、以及光纤长度检测组件,所述光纤张力检测组件用于检测所述光纤被牵引时的张力大小,所述光纤张力调节组件用于调节所述光纤被牵引时的张力大小,所述光纤长度检测组件用于检测所述光纤的长度。
17、进一步地,所述变节距光纤绕制设备还包括节距检测装置和胶固装置,所述节距检测装置和所述胶固装置沿所述骨架的牵引方向依次设置于所述绕线装置靠近所述第二牵引装置的一侧;所述节距检测装置用于检测缠绕所述光纤后的所述骨架的节距,所述胶固装置用于对缠绕于所述骨架上的所述光纤涂覆和固化胶层。
18、本申请实施例还提供一种变节距光纤绕制方法,所述变节距光纤绕制方法应用于上述变节距光纤绕制设备,并包括如下步骤:
19、s1、将所述骨架从所述第一牵引装置牵出,并牵引所述骨架依次经过所述骨架张力检测组件、骨架张力调节组件、骨架长度检测装置、绕线装置,并将所述骨架从所述第二牵引装置牵出;
20、s2、沿所述骨架的牵引方向依次对所述骨架进行分段,获得多个骨架段;
21、s3、将多个所述骨架段对应的骨架标准米长及标准节距存储于所述控制装置内;
22、s4、启动所述变节距光纤绕制设备,并根据沿所述骨架的牵引方向位于前端的所述骨架段对应的所述标准节距调节所述绕线装置的绕线速度;
23、s5、在骨架长度检测装置检测到所述骨架的移动距离与所述骨架标准米长一致时,所述控制装置调取位于当前所述骨架段后侧的相邻所述骨架段所对应的所述标准节距,并根据所述标准节距调节所述绕线装置的绕线速度;
24、s6、重复步骤s5,直至沿所述骨架的牵引方向位于后端的所述骨架段完成光纤缠绕作业。
25、进一步地,所述控制装置预设有至少两个骨架标准米长及至少两个标准节距,至少两个所述标准节距分别与至少两个所述骨架标准米长对应设置,所述控制装置将所述骨架的移动距离与所述骨架标准米长比对,以在所述骨架的移动距离达到所述骨架标准米长后,调整所述光纤的缠绕速度,使所述光纤缠绕于所述骨架的节距为与所述骨架标准米长对应的所述标准节距。
26、相较于现有技术,本申请的变节距光纤绕制设备通过第一牵引装置和第二牵引装置自动牵引骨架移动,并在第一牵引装置和第二牵引装置之间设置骨架长度检测装置、绕线装置和放线装置,由放线装置将光纤不断放线至绕线装置,并由绕线装置将光纤不断缠绕于骨架的不同区段的外周,从而实现光纤的自动化绕制。此外,变节距光纤绕制设备持续检测骨架移动的距离,并将检测结果实时反馈给控制装置,当骨架移动距离达到控制装置内的预设值时,控制装置调整绕线装置的缠绕速度,使光纤绕制于骨架上的节距改变,进而实现骨架的不同区段自动绕制有不同节距的光纤。
技术特征:
1.一种变节距光纤绕制设备,其特征在于,包括:
2.如权利要求1所述的变节距光纤绕制设备,其特征在于,所述骨架长度检测装置包括第一检测支架、第一检测轮和第一计数单元,所述第一检测支架设于所述第一牵引装置与所述绕线装置之间,所述第一检测轮可转动地安装于所述第一检测支架,所述骨架部分抵持于所述第一检测轮的外周面,所述骨架被牵引移动时,所述骨架驱动所述第一检测轮旋转,所述第一计数单元用于检测所述第一检测轮的旋转圈数。
3.如权利要求1所述的变节距光纤绕制设备,其特征在于,所述变节距光纤绕制设备还包括:
4.如权利要求1所述的变节距光纤绕制设备,其特征在于,所述第一牵引装置包括第一牵引组件、第二牵引组件和升降组件,所述第一牵引组件与所述第二牵引组件间隔设置,且分设于所述骨架的相对两侧,所述升降组件传动连接所述第一牵引组件,用于驱动所述第一牵引组件靠近或远离所述第二牵引组件。
5.如权利要求4所述的变节距光纤绕制设备,其特征在于,所述第一牵引组件包括第一牵引架、两个第一牵引轮和第一牵引带,两个所述第一牵引轮沿所述骨架的牵引方向间隔设置,且可转动地安装于所述第一牵引架,所述第一牵引带环绕两个所述第一牵引轮的外周设置;
6.如权利要求1所述的变节距光纤绕制设备,其特征在于,所述绕线装置包括绕线驱动器和回转盘,所述回转盘供所述骨架穿过,所述绕线驱动器传动连接所述回转盘,用于驱动所述回转盘绕所述骨架转动,所述变节距光纤绕制设备还包括光纤控制装置,所述光纤控制装置固定于所述回转盘。
7.如权利要求6所述的变节距光纤绕制设备,其特征在于,所述光纤控制装置包括光纤张力检测组件、光纤张力调节组件、以及光纤长度检测组件,所述光纤张力检测组件用于检测所述光纤被牵引时的张力大小,所述光纤张力调节组件用于调节所述光纤被牵引时的张力大小,所述光纤长度检测组件用于检测所述光纤的长度。
8.如权利要求1所述的变节距光纤绕制设备,其特征在于,所述变节距光纤绕制设备还包括节距检测装置和胶固装置,所述节距检测装置和所述胶固装置沿所述骨架的牵引方向依次设置于所述绕线装置靠近所述第二牵引装置的一侧;所述节距检测装置用于检测缠绕于所述骨架上的所述光纤的节距,所述胶固装置用于对缠绕于所述骨架上的所述光纤涂覆和固化胶层。
9.一种变节距光纤绕制方法,其特征在于,所述变节距光纤绕制方法应用于如权利要求1至8任意一项中所述的变节距光纤绕制设备,并包括如下步骤:
10.如权利要求9所述的变节距光纤绕制方法,其特征在于,所述控制装置预设有至少两个骨架标准米长及至少两个标准节距,至少两个所述标准节距分别与至少两个所述骨架标准米长对应设置,所述控制装置将所述骨架的移动距离与所述骨架标准米长比对,以在所述骨架的移动距离达到所述骨架标准米长后,调整所述光纤的缠绕速度,使所述光纤缠绕于所述骨架的节距为与所述骨架标准米长对应的所述标准节距。
技术总结
本申请提供一种变节距光纤绕制设备及绕制方法,变节距光纤绕制设备包括第一牵引装置、第二牵引装置、骨架长度检测装置、绕线装置、放线装置及控制装置,第一牵引装置用于牵引骨架的一端移动;第二牵引装置间隔设于第一牵引装置的一侧,用于牵引骨架的另一端移动;骨架长度检测装置设于第一牵引装置与第二牵引装置之间,用于检测骨架的移动距离;绕线装置可绕骨架转动,用于牵引光纤缠绕骨架;放线装置设于绕线装置的一侧,用于将光纤牵引至绕线装置;控制装置分别与骨架长度检测装置、第一牵引装置、第二牵引装置及绕线装置信号连接,用于根据骨架长度检测装置的检测结果调整绕线装置的缠绕速度。
技术研发人员:张炎兵,赵静,罗虎
受保护的技术使用者:中天智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!