一种零件运输车及运输系统
本发明涉及运输,具体为一种零件运输车及运输系统。
背景技术:
1、目前,在汽车的生产线中,需要用到的汽车零部件一般都是集中放置在生产线的备货区,由作业人员根据指示进行备货送货。现有的备货送货方式,通常是作业人员通过手推车或者搬运车,将备好的汽车零部件输送到生产线的两侧,以进行汽车零部件的投入和对取出汽车零部件后的空箱进行回收。也存在采用agv小车进行无人搬送的方式。
2、然而,零件在运输过程中通过采用人工搬运的方式将零件运输至特定工序,效率较低,且人工成本大;而利用agc小车环境受限大、易受外界影响且投资成本高,同时运输过程中难以完成无人化、自动化的输送和卸料。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种零件运输车及运输系统,解决了传统运输车通过采用人工搬运的方式将零件运输至特定工序,效率较低,且人工成本大;而利用agc小车环境受限大、易受外界影响且投资成本高,同时运输过程中难以完成无人化、自动化的输送和卸料的问题。
3、(二)技术方案
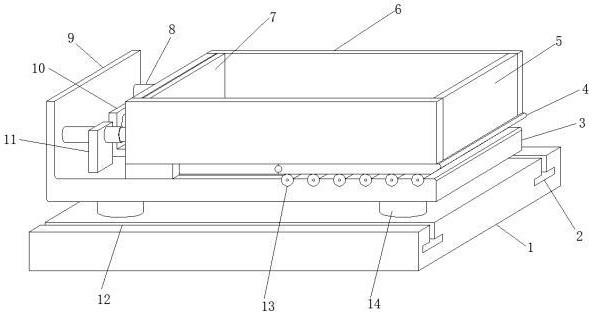
4、为实现以上目的,本发明通过以下技术方案予以实现:一种零件运输车,包括底座,所述底座上端面靠前侧和靠后侧处均开设有滑槽,所述底座两侧靠前侧和靠后端处均开设有通槽,所述底座上端面两侧前后端处均固定设置有电动伸缩杆,四个所述电动伸缩杆上端面均固定设置有车架,所述车架一侧固定设置有背板,所述车架上端面一侧前后端处均固定设置有固定板,两个所述固定板相对一侧的一端固定设置有侧板,所述车架上端面另一侧通过轴承和转轴转动嵌入设置有多个滚轴;
5、所述背板一侧靠前端和靠后端处均固定设置有电动气缸,两个所述电动气缸输出端固定连接有活动机构,所述活动机构包括活动板和放置板,所述放置板一侧通过连接座固定设置有液压推杆,所述液压推杆输出端固定设置有推动板,所述放置板下端面一侧靠前端处均固定设置有滑动块,所述车架上端面靠中点的前后端处均开设有滑动槽,所述底座内部两侧均嵌入设置有蓄电池,所述底座内部中点处嵌入设置有控制主板,所述底座下端面中点处转动设置有多个滚动柱。
6、优选的,所述活动板通过铰接轴与放置板转动铰接连接,两个所述电动气缸外侧均固定套接有支撑座且支撑座固定设置于车架上端面。
7、优选的,两个所述滑动块分别滑动设置于两个滑动槽内,两个所述蓄电池均与控制主板电性连接,两个所述电动气缸、液压推杆和四个电动伸缩杆均与控制主板电性连接,其中两个所述电动气缸、液压推杆和四个电动伸缩杆分别独立控制。
8、优选的,还包括两个第一运输架和第二运输架,其中两个所述第一运输架分别位于第二运输架的两侧且其中一个高度高于另一个第一运输架,所述第一运输架包括架体,所述架体内壁前后端均固定设置有第二导向轨且两个第二导向轨 两端均固定设置有限位板,两个所述限位板相对一侧中点处固定设置有第一导向轨;
9、所述第二运输架包括框架,所述框架内壁前后端处均开设有收卷槽,两个所述收卷槽内滑动设置有移动板,所述移动板下端面前后端处均固定设置有连接板且连接板下端固定设置有卡接板,所述框架前端面靠上端处固定设置有收卷电机且输出端通过输出轴固定套接有两个收卷条;
10、所述第二运输架下端外侧固定设置有输送架,所述输送架下端前后侧处通过滚轮滑动卡接有运输轨道,两个所述运输轨道下端固定设置有多个轨道柱,所述输送架上端面固定设置有多个直线驱动电机。
11、优选的,两个所述第二导向轨上端设置有多个导向滚柱,所述第一导向轨上端开设有导向槽且运输车本体滑动设置于第一运输架上端。
12、优选的,包括智能运输系统和运输车处理系统,所述智能运输系统包括运输处理单元和数据获取模块,所述运输车处理系统包括智能处理中心、原始数据存储单元、定点追踪标记模块、获取数据转换单元和数据获取处理单元,所述运输处理单元和数据获取模块通过信号同步单元连接。
13、优选的,所述运输处理单元包括第一运输驱动单元和第二运输驱动单元,所述第一运输驱动单元和第二运输驱动单元通过关联模块连接。
14、工作原理:将该运输车放置于两个第一运输架上端,使其下端的滚动柱嵌入于第一运输架的第一导向轨的轨道槽内,且运输车底座前后端位于两个第二导向轨上端,此时由第二导向轨上端的导向滚柱带动运输车进行运输,使其运至运输架的另一端,此时第二运输架在收卷电机的驱动下将内侧的卡接板下移使其对准运输车的通槽处,并由直线驱动电机带动输送架横向运动使其卡入通槽内,完成卡接后收卷电机收卷将卡接板上拉,从而将运输车上移,第二运输架在输送架和运输轨道的配合下向另一第一运输架移动,并在输送到另一第一运输架上端时,再次利用收卷电机将运输车放置输送架上,重复上述操作后,将运输车送至最终输送架尾部,此时运输车根据高度需要,由电动伸缩杆进行高度上移后,由电动气缸推动活动机构横向位移,而活动机构横向位移时其一端因自身重力发生向下倾斜,使得活动板与侧板之间出现漏口,从而将上端的存放的零件自然下落,且可利用液压推杆推动零件,将存储于内侧的零件进行推送下落,全程无需人工操作,使用方便快捷。
15、(三)有益效果
16、本发明提供了一种零件运输车及运输系统。具备以下有益效果:
17、1、本发明提供了一种零件运输车及运输系统,通过将运输车设置在具有输送导向的多个运输架上,且多个运输架可根据需要进行横向输送方向和竖向方向以及竖向上下分层设置的叠排排布,不仅实现了多品种小批量零件加工制造的快速输送,实现了输送的自动上下料及操作无人化,便于提高作业效率,同时可根据零件运输区域场景的需要随机更改运输系统的排布方式,能够大幅度减少新轨道搭建所需时间和成本,且根据场地大小进行叠排排布输送,更好的适配多种场地区域使用。
18、2、本发明提供了一种零件运输车及运输系统,该运输车在输送系统的输送下,当输送车需要进行上端存储的零件进行卸料时,由运输车内部的控制主板分别控制两个电动气缸和液压推杆,两个电动气缸带动活动机构横向位移,此时活动机构下端铰接可转动的活动板在滚轴上端进行滑动,并在自身重力下发生向下倾斜,此时活动板与侧板之间出现漏口,同时液压推杆由内侧横向推动推动板位移,推动板推动内侧零件横移至漏口,从而完成倾倒卸货,实现了输送的自动下料及操作无人化,减轻了工作人员的劳动强度。
技术特征:
1.一种零件运输车,包括底座(1),其特征在于:所述底座(1)上端面靠前侧和靠后侧处均开设有滑槽(12),所述底座(1)两侧靠前侧和靠后端处均开设有通槽(2),所述底座(1)上端面两侧前后端处均固定设置有电动伸缩杆(14),四个所述电动伸缩杆(14)上端面均固定设置有车架(3),所述车架(3)一侧固定设置有背板(9),所述车架(3)上端面一侧前后端处均固定设置有固定板(6),两个所述固定板(6)相对一侧的一端固定设置有侧板(5),所述车架(3)上端面另一侧通过轴承和转轴转动嵌入设置有多个滚轴(13);
2.根据权利要求1所述的一种零件运输车,其特征在于:所述活动板(401)通过铰接轴(403)与放置板(402)转动铰接连接,两个所述电动气缸(8)外侧均固定套接有支撑座(11)且支撑座(11)固定设置于车架(3)上端面。
3.根据权利要求1所述的一种零件运输车,其特征在于:两个所述滑动块(16)分别滑动设置于两个滑动槽(17)内,两个所述蓄电池(19)均与控制主板(18)电性连接,两个所述电动气缸(8)、液压推杆(15)和四个电动伸缩杆(14)均与控制主板(18)电性连接,其中两个所述电动气缸(8)、液压推杆(15)和四个电动伸缩杆(14)分别独立控制。
4.根据权利要求1所述的一种零件运输车,其特征在于:还包括两个第一运输架(21)和第二运输架(22),其中两个所述第一运输架(21)分别位于第二运输架(22)的两侧且其中一个高度高于另一个第一运输架(21),所述第一运输架(21)包括架体(2101),所述架体(2101)内壁前后端均固定设置有第二导向轨(2104)且两个第二导向轨 (2104)两端均固定设置有限位板(2103),两个所述限位板(2103)相对一侧中点处固定设置有第一导向轨(2102);
5.根据权利要求4所述的一种零件运输车,其特征在于:两个所述第二导向轨(2104)上端设置有多个导向滚柱,所述第一导向轨(2102)上端开设有导向槽且运输车本体滑动设置于第一运输架(21)上端。
6.根据权利要求1所述的一种零件运输车,其特征在于:包括智能运输系统(27)和运输车处理系统(28),所述智能运输系统(27)包括运输处理单元(2701)和数据获取模块(2702),所述运输车处理系统(28)包括智能处理中心(2801)、原始数据存储单元(2802)、定点追踪标记模块(2803)、获取数据转换单元(2804)和数据获取处理单元(2805),所述运输处理单元(2701)和数据获取模块(2702)通过信号同步单元(29)连接。
7.根据权利要求6所述的一种零件运输车,其特征在于:所述运输处理单元(2701)包括第一运输驱动单元(270101)和第二运输驱动单元(270103),所述第一运输驱动单元(270101)和第二运输驱动单元(270103)通过关联模块(270102)连接。
技术总结
本发明提供一种零件运输车及运输系统,涉及运输技术领域。该零件运输车,包括底座,所述底座上端面靠前侧和靠后侧处均开设有滑槽,所述底座两侧靠前侧和靠后端处均开设有通槽。通过将运输车设置在具有输送导向的多个运输架上,且多个运输架可根据需要进行横向输送方向和竖向方向以及竖向上下分层设置的叠排排布,不仅实现了多品种小批量零件加工制造的快速输送,实现了输送的自动上下料及操作无人化,便于提高作业效率,同时可根据零件运输区域场景的需要随机更改运输系统的排布方式,能够大幅度减少新轨道搭建所需时间和成本,且根据场地大小进行叠排排布输送,更好的适配多种场地区域使用。
技术研发人员:陈晓斐,赵吉虎,王建朝,郭晖
受保护的技术使用者:酒泉职业技术学院(甘肃广播电视大学酒泉市分校)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!