一种机器人用吊轨系统
:本发明涉及机器人,特别涉及一种机器人用吊轨系统。
背景技术
0、
背景技术:
1、随着智能制造产业在国内的快速发展,基于人工智能开发环境土壤的滋养,衍生出了非常多的人工智能项目,其中,机器人与物流业的结合打造的智能物流生态随着国内科学技术的进步和经济的飞速发展也在不断的更新迭代。目前,物流机器人在快递仓库、商场商超、地下停车场还有很多应用场景中均被采用,物流机器人具有快速协同,精确投放等优点,代替了传统人工,解放了生产力,造就了物流业几何式市场扩张的经济繁荣景象。但是,物流机器人其本身也存在很多尚未克服的弊端,例如现有的地面行走类机器人,因为轨道占地面积大,大大降低空间利用率。又例如现有的挂轨式机器人,虽然解决了占地空间大的问题,但空中轨道通常是设计成一条从初始端到目标端的单一轨道,多个机器人只能按照次序在轨道上运行,不能同时承接不同的任务,且相互之间很容易产生碰撞,或前面机器人停滞,后面的机器人则无法运行,工作效率大大降低。
技术实现思路
0、
技术实现要素:
1、本发明的目的就在于为了解决上述问题而提供一种机器人用吊轨系统,解决了现有的挂轨式机器人容易相互影响,从而使得工作效率低下的问题。
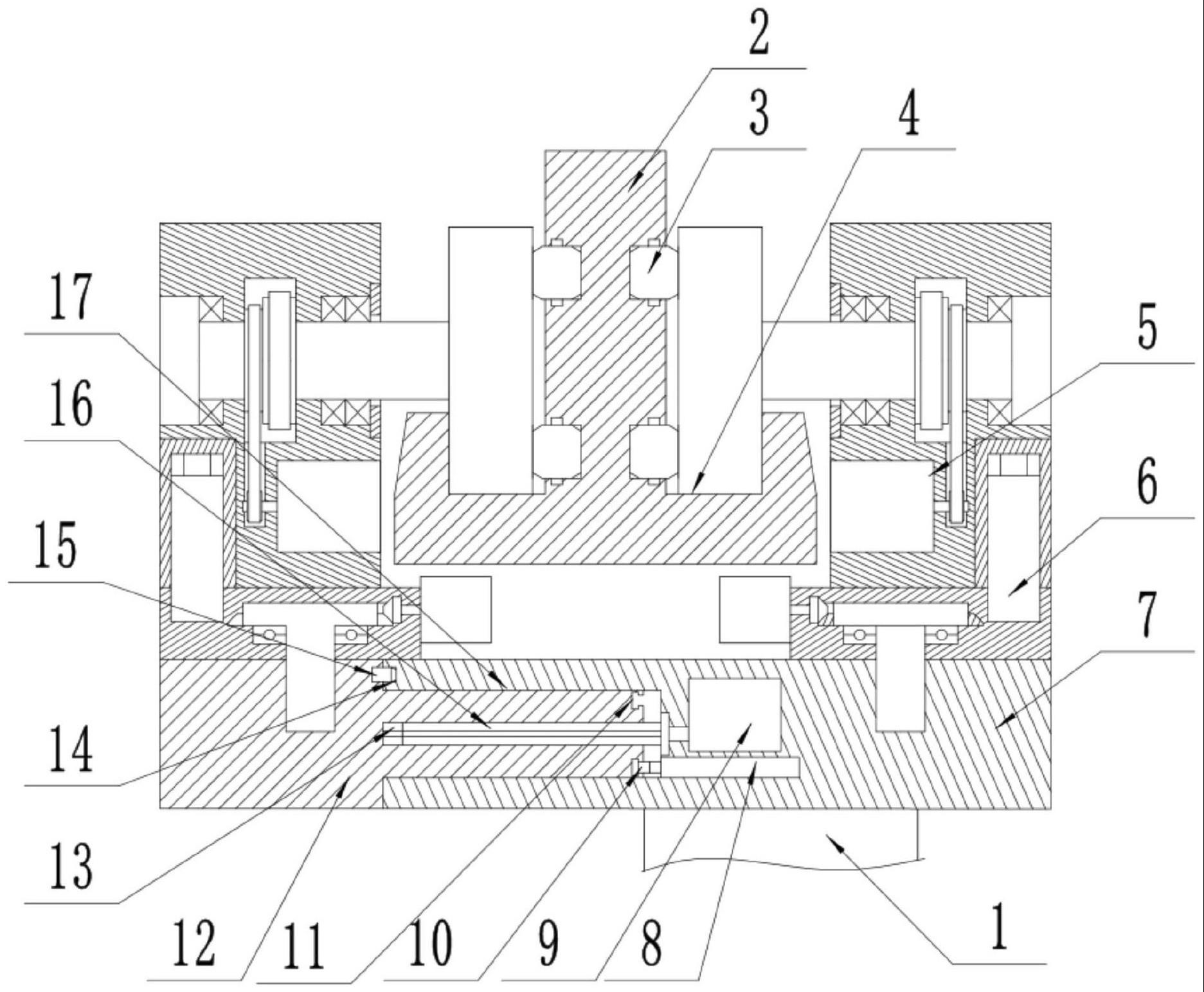
2、为了解决上述问题,本发明提供了一种技术方案:一种机器人用吊轨系统,包括机器人本体,其创新点在于:还包括吊轨、滑轮、轨道吊槽、单行走装置、旋转升降装置、连接座一、油缸一、电机一、t形头、t形滑槽、连接座二、花键孔、卡槽、卡块、花键轴和导孔;所述吊轨左右两下侧均开设有轨道吊槽,且轨道吊槽内侧面上下位置均活动连接有若干个滑轮;所述连接座一左前侧开设有导孔,所述连接座一中央内部上侧固定连接有电机一,所述连接座一中央内部下侧固定连接有油缸一,所述连接座一左上侧开设有卡槽,所述连接座一底部中央固定连接有机器人本体;所述连接座二右侧外部活动连接在导孔内部,所述连接座二中央内部设有花键孔,所述连接座二中央台阶面上侧固定连接有卡块,且卡块右侧与卡槽相连,所述连接座二右侧端面上开设有t形滑槽;所述花键轴活动连接在导孔中央,所述花键轴右侧中心与电机一左侧输出轴固定连接,所述花键轴左侧与花键孔相连接;所述t形头右侧端部固定连接在油缸一左侧活塞杆端部,所述t形头左侧外部活动连接在t形滑槽内部;所述旋转升降装置为两个,两个所述旋转升降装置呈对称设置且底部分别固定连接在连接座一右上侧以及连接座二左上侧,两个所述旋转升降装置上侧均固定连接有对称设置的单行走装置,且单行走装置上内侧分别与对应的轨道吊槽相连。
3、作为优选,所述单行走装置的具体结构包括行走轮、连接轴、端盖、轴承、同步带一、传动带轮、从动带轮、同步带二、主动带轮、电机二和行走箱体;所述连接轴为两个,两个所述连接轴右侧外部分别活动连接在行走箱体上侧前后侧内部,两个所述连接轴左侧端部均固定连接有行走轮,两个所述连接轴右侧外部与所述行走箱体上侧前后侧对应的内部之间均设有数个轴承;所述端盖为两个,两个所述端盖分别固定连接在行走箱体左上侧前后位置的开口处;所述传动带轮为两个,两个所述传动带轮内部分别固定连接在对应的连接轴中央外部,两个所述传动带轮之间通过同步带一相连接;所述从动带轮固定连接在一个连接轴中央右侧外部;所述电机二固定连接在行走箱体下侧内部,所述电机二输出轴上固定连接有主动带轮,且主动带轮通过同步带二与从动带轮相连接。
4、作为优选,所述行走轮侧面为光滑面。
5、作为优选,所述电机二为伺服电机或变频电机。
6、作为优选,所述旋转升降装置的具体结构包括连接壳体、滑孔、油缸二、安装座、从动齿轮、旋转座、主动齿轮和电机三;所述连接壳体下侧内部设有竖向的滑孔;所述油缸二外侧呈竖向活动连接在滑孔内部,所述油缸二上侧活塞杆端部与滑孔顶部固定连接,所述油缸二底部固定连接在安装座右上侧内部;所述旋转座上侧外部活动连接在安装座左侧内部,所述旋转座上侧外部固定连接有从动齿轮;所述电机三固定连接在安装座左侧,所述电机三右侧输出轴上固定连接有主动齿轮,且主动齿轮与从动齿轮相连接。
7、作为优选,所述旋转座上侧台阶面底部与所述安装座左侧内部下侧之间设有推力球轴承。
8、作为优选,所述电机三为带刹车的减速电机。
9、作为优选,所述电机一为带刹车的减速电机。
10、本发明的有益效果:
11、(1)本发明具有结构合理简单、生产成本低、安装方便,这里设置的若干个滑轮,能够确保单个单行走装置通过行走轮行走的稳定性和可靠性,从而满足了机器人避让时行走的需要。
12、(2)本发明中设置的两个单行走装置和两个旋转升降装置,从而能够通过其相互配合使机器人完全位于吊轨一侧或另一侧,从而满足了相对机器人的避让或超过前面机器人的需要,也就提高了工作的效率。
13、(3)本发明单行走装置中均设有两个行走轮,从而确保了单个单行走装置行走时也能够保持平衡,也就提高了工作时候的稳定性和可靠性。
技术特征:
1.一种机器人用吊轨系统,包括机器人本体(1),其特征在于:还包括吊轨(2)、滑轮(3)、轨道吊槽(4)、单行走装置(5)、旋转升降装置(6)、连接座一(7)、油缸一(8)、电机一(9)、t形头(10)、t形滑槽(11)、连接座二(12)、花键孔(13)、卡槽(14)、卡块(15)、花键轴(16)和导孔(17);
2.根据权利要求1所述的机器人用吊轨系统,其特征在于:所述单行走装置(5)的具体结构包括行走轮(51)、连接轴(52)、端盖(53)、轴承(54)、同步带一(55)、传动带轮(56)、从动带轮(57)、同步带二(58)、主动带轮(59)、电机二(510)和行走箱体(511);
3.根据权利要求2所述的机器人用吊轨系统,其特征在于:所述行走轮(51)侧面为光滑面。
4.根据权利要求2所述的机器人用吊轨系统,其特征在于:所述电机二(510)为伺服电机或变频电机。
5.根据权利要求1所述的机器人用吊轨系统,其特征在于:所述旋转升降装置(6)的具体结构包括连接壳体(61)、滑孔(62)、油缸二(63)、安装座(64)、从动齿轮(65)、旋转座(66)、主动齿轮(67)和电机三(68);
6.根据权利要求5所述的机器人用吊轨系统,其特征在于:所述旋转座(66)上侧台阶面底部与所述安装座(64)左侧内部下侧之间设有推力球轴承。
7.根据权利要求5所述的机器人用吊轨系统,其特征在于:所述电机三(68)为带刹车的减速电机。
8.根据权利要求1所述的机器人用吊轨系统,其特征在于:所述电机一(9)为带刹车的减速电机。
技术总结
本发明公开了一种机器人用吊轨系统,包括吊轨、滑轮、轨道吊槽、单行走装置、旋转升降装置、连接座一、油缸一、电机一、T形头、T形滑槽、连接座二、花键孔、卡槽、卡块、花键轴和导孔;本发明中设置的若干个滑轮,能够确保单个单行走装置通过行走轮行走的稳定性和可靠性,从而满足了机器人避让时行走的需要;本发明中设置的两个单行走装置和两个旋转升降装置,从而能够通过其相互配合使机器人完全位于吊轨一侧或另一侧,从而满足了相对机器人的避让或超过前面机器人的需要,也就提高了工作的效率;本发明单行走装置中均设有两个行走轮,从而确保了单个单行走装置行走时也能够保持平衡,也就提高了工作时候的稳定性和可靠性。
技术研发人员:夏建平,胡玉彬,康徐红
受保护的技术使用者:南通理工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!