检测塔机机构运动卡滞的方法、系统及控制器与流程
本申请涉及工程机械,具体地涉及一种检测塔机机构运动卡滞的方法、系统及控制器。
背景技术:
1、在塔机的工作过程中,塔机起升、回转、变幅机构在变频器驱动下能正常运动,且受塔机司机操控手柄的控制。司机需仔细观察机构运行情况,防止外界因素干扰导致机构的卡滞、堵转,从而引发一系列的事故。目前,在现有的技术方案中,在塔机机构运行过程中,缺少能够对塔机机构运动卡滞进行实时自动检测的方法,需要司机高度注视是否发生卡滞、堵转来避免发生意外。因此,传统的技术方案存在对塔机机构的运动卡滞检测的方法精度较低,且易发生安全事故的问题。
技术实现思路
1、本申请实施例的目的是提供一种检测塔机机构运动卡滞的方法、系统及控制器,用以解决现有技术中对塔机机构的运动卡滞检测的方法精度较低,且易发生安全事故的问题。
2、为了实现上述目的,本申请第一方面提供一种检测塔机机构运动卡滞的方法,应用于控制器,控制器分别与变频器和位移测量装置通信,该方法包括:
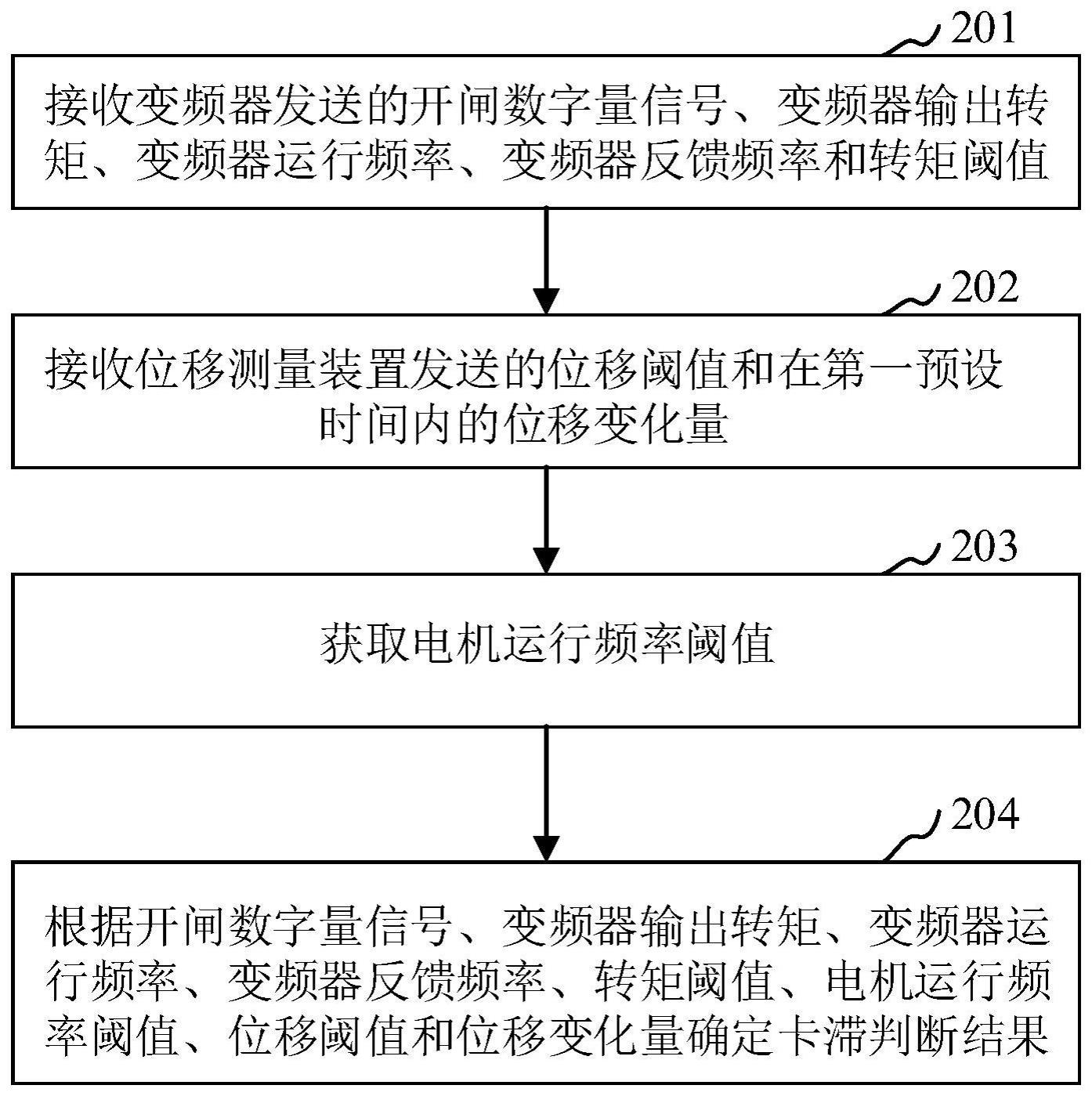
3、接收变频器发送的开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率和转矩阈值;
4、接收位移测量装置发送的位移阈值和在第一预设时间内的位移变化量;
5、获取电机运行频率阈值;
6、根据开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率、转矩阈值、电机运行频率阈值、位移阈值和位移变化量确定卡滞判断结果。
7、在本申请实施例中,初始卡滞判断结果满足公式(1):
8、y=x1*(|x2|-a)*(|x3|-b)*(|x4|-|x5|)*(c-|x6|);(1)
9、其中,y为初始卡滞判断结果;x1为变频器发送的开闸数字量信号;x2为变频器输出转矩;x3为变频器运行频率;x4为变频器运行频率的目标倍数;x5为变频器反馈频率;x6为第一预设时间内的位移变化量;a为转矩阈值;b为电机运行频率阈值;c为位移阈值。
10、在本申请实施例中,变频器与电机连接并驱动电机运行,接收变频器发送的转矩阈值包括:
11、控制变频器对电机施加转矩电流,使得电机的电流达到电机额定电流的预设倍数;
12、将施加转矩电流过程中的获取的电机的最大转矩值确定为转矩阈值。
13、在本申请实施例中,接收位移测量装置发送的位移阈值包括:
14、获取在施加转矩电流过程中的位移测量装置采样值的多个偏差值;
15、将位移测量装置采样值的多个偏差值中的最大偏差值确定为位移阈值。
16、在本申请实施例中,根据开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率、转矩阈值、电机运行频率阈值、位移阈值和位移变化量确定卡滞判断结果包括:
17、根据开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率、转矩阈值、电机运行频率阈值、位移阈值和位移变化量确定初始卡滞判断结果;
18、判断初始卡滞判断结果是否大于零;
19、在初始卡滞判断结果大于零的情况下,判断在第二预设时间内初始卡滞判断结果是否持续大于零;
20、在第二预设时间内初始卡滞结果持续大于零的情况下,输出卡滞判断结果为塔机机构运动卡滞。
21、在本申请实施例中,该方法还包括:
22、在输出卡滞判断结果为塔机机构运动卡滞的情况下,发送停机指令至变频器,以通过变频器控制电机停止运行。
23、在本申请实施例中,控制器还与报警装置通信,该方法还包括:
24、在输出卡滞判断结果为塔机机构运动卡滞的情况下,发送报警指令至报警装置,以控制报警装置进行报警提示。
25、本申请第二方面提供一种控制器,包括:
26、存储器,被配置成存储指令;以及
27、处理器,被配置成从存储器调用指令以及在执行指令时能够实现根据上述的检测塔机机构运动卡滞的方法。
28、本申请第三方面提供一种检测塔机机构运动卡滞的系统,包括:
29、根据上述的控制器;
30、变频器,与控制器通信,被配置成发送开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率、转矩阈值和电机运行阈值至控制器;
31、位移测量装置,与控制器通信,被配置成发送位移阈值和在预设时间内的位移变化量至控制器;
32、报警装置,与控制器通信,被配置成根据控制器的报警指令进行报警提示;
33、电机,与变频器通信,被配置成接收变频器施加的转矩电流。
34、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据上述的检测塔机机构运动卡滞的方法。
35、通过上述技术方案,控制器分别接收变频器发送的开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率和转矩阈值;和位移测量装置发送的位移阈值和在第一预设时间内的位移变化量;并获取电机运行频率阈值;再根据开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率、转矩阈值、电机运行频率阈值、位移阈值和位移变化量确定卡滞判断结果,可以对塔机机构的运动卡滞检测的精度,降低发生安全事故的概率。
36、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种检测塔机机构运动卡滞的方法,其特征在于,应用于控制器,所述控制器分别与变频器和位移测量装置通信,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述初始卡滞判断结果满足公式(1):
3.根据权利要求1所述的方法,其特征在于,所述变频器与电机连接并驱动所述电机运行,接收所述变频器发送的转矩阈值包括:
4.根据权利要求3所述的方法,其特征在于,接收所述位移测量装置发送的位移阈值包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述开闸数字量信号、所述变频器输出转矩、所述变频器运行频率、所述变频器反馈频率、所述转矩阈值、所述电机运行频率阈值、所述位移阈值和所述位移变化量确定卡滞判断结果包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述控制器还与报警装置通信,所述方法还包括:
8.一种控制器,其特征在于,包括:
9.一种检测塔机机构运动卡滞的系统,其特征在于,包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至7中任一项所述的检测塔机机构运动卡滞的方法。
技术总结
本申请公开了一种检测塔机机构运动卡滞的方法、系统及控制器。该方法包括:接收变频器发送的开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率和转矩阈值;接收位移测量装置发送的位移阈值和在第一预设时间内的位移变化量;获取电机运行频率阈值;根据开闸数字量信号、变频器输出转矩、变频器运行频率、变频器反馈频率、转矩阈值、电机运行频率阈值、位移阈值和位移变化量确定卡滞判断结果。本申请通过根据多数据融合确定卡滞判断结果,可以提高机构运动卡滞判断的精确度,提高机构工作的安全性。
技术研发人员:王锋
受保护的技术使用者:中联重科建筑起重机械有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!