一种基于颜色识别的货物夹取摆放方法
本发明涉及智能设备,具体涉及一种基于颜色识别的货物夹取摆放方法。
背景技术:
1、现有的分拣工作通过机器人完成,机器人识别夹持到的物体,并将物体转移到对应的区域储存。而将机器视觉应用到物体的分拣与定位中对提高货物的分拣效率和放置的准确度有很大意义,其能提供对物块的二次定位信息,从而提高抓取与放置货物的准确性。
2、在中国申请号为202110059495.5,公布日为2021.4.30的专利文献公开了一种物流机器人及其抓取方法,包括底盘,旋转装置面、机械臂、机械爪和视觉检测模块;抓取方法包括:扫描二维码信息获取搬运任务;根据搬运任务对机器人运动进行定位;对物块进行识别颜色,根据识别结果先后抓取不同颜色的物块;识别货架下方条形码信息,确定物块放置的货架,完成放置。
3、该物流机器人通过识别的物块的颜色,然后判断物块的色块中心在openmv视觉中的相对位置判断物块所处位置;在识别时没有考虑亮度和色差的影响,若物块的颜色与环境的颜色接近,则不能准确识别物块的位置,同时在摆放货物时并没有考虑货物的摆放角度是否一致,从而无法保证摆放角度的一致性。
技术实现思路
1、本发明提供一种基于颜色识别的货物夹取摆放方法,在货物上设置色块,增大色块与环境图像的色差,通过色块与环境图像的色差,准确获取货物的位置。
2、为达到上述目的,本发明的技术方案是:一种基于颜色识别的货物夹取摆放方法,通过机器人实现,机器人包括底盘,在底盘底部设有行走装置,在底盘顶部设有夹取装置,夹取装置包括旋转装置和多关节机械臂,多关节机械臂设置在旋转装置上,多关节机械臂的一端设有夹手和视觉模块。
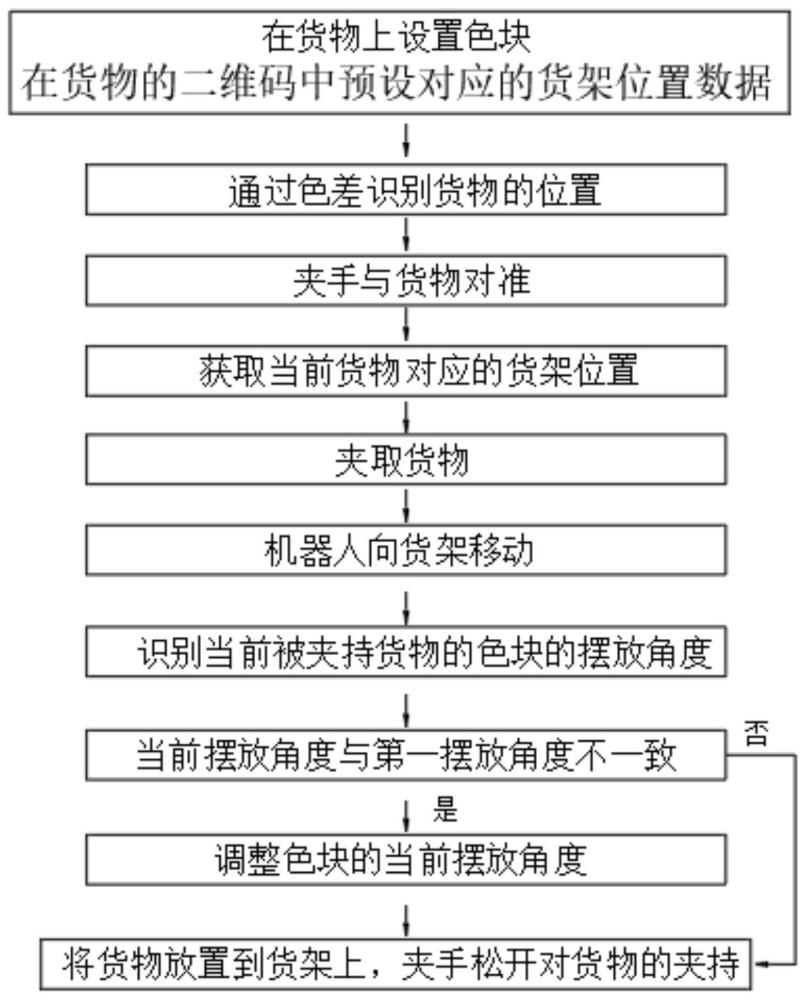
3、基于颜色识别的货物夹取摆放方法,包括以下步骤:
4、s1、在货物上设置色块,色块与环境图形之间具有色差;预设色块的第一摆放角度;在货物的二维码中预设货架位置。
5、s2、通过视觉模块的lab颜色阈值提取器获取一色块与环境图像之间的亮度差值色块与环境图像之间的红绿色差值色块与环境图像之间的蓝黄色差值。
6、s3、通过公式计算出色块与环境图像之间的色差通过色差确定色块在环境图像中位置。
7、s4、旋转装置和多关节机械臂驱动夹手与货物对准。
8、s5、通过视觉模块识别当前货物的二维码。
9、s6、夹手夹取货物。
10、s7、机器人向货架移动。
11、s8、通过视觉模块识别当前被夹持货物的色块的摆放角度,若色块的当前摆放角度与第一摆放角度不一致,则进行s9;若色块的当前摆放角度与第一摆放角度一致,则进行s10。
12、s9、旋转装置和多关节机械臂驱动夹手动作,使得色块的当前摆放角度与第一摆放角度一致;然后进行s10。
13、s10、将货物放置到货架上,夹手松开对货物的夹持。
14、以上方法,在货物上设置色块,增大色块与环境图像的色差,这样更好的识别货物在环境图像中的位置;避免货物的颜色与环境颜色接近,导致不能在环境图像中识别出货物的情况出现;然后通过lab颜色阈值确定色块与环境图像的色差,通过色块与环境图像之间的亮度差值、红绿色差值以及蓝黄色差值确定色差值,能从亮度差值、红绿色差值以及蓝黄色差值三个颜色的主要体现方面对色差值进行计算,防止亮度变化以及红绿色以及蓝黄色变化对货物位置获取的影响,从而准确获取货物的位置。
15、当夹取货物后,行走装置驱动机器人向货架移动,并将当前被夹取的货物放置在货架上;同时还通过视觉模块获取货物的当前摆放角度,若当前摆放角度与第一摆放角度不一致,则对货物进行调整,驱动货物进行旋转,使货物的当前摆放角度与第一摆放角度一致;从而使货物放置在货架后,货物在货架中摆正。
16、进一步的,s4中,旋转装置和多关节机械臂驱动夹手与货物对准;包括以下步骤:
17、s4.1、视觉模块将识别到的图像沿水平方向划分为左侧区域、中间区域和右侧区域。
18、s4.2、判断货物是否位于图像的中间区域,若是,则通过多关节机械臂调节夹手的水平高度,使夹手与货物对准;若否,则进行s4.3。
19、s4.3、通过旋转装置驱动夹手旋转,使货物位于图像的中间区域,然后通过多关节机械臂调节夹手的水平高度,使夹手与货物对准。
20、以上方法,将图像划分为左侧区域、中间区域和右侧区域,便于夹手与货物对准;当货物位于图像的左侧区域和右侧区域时,通过旋转装置调整夹手与货物的水平位置;当货物位于图像的中间区域时,通过多关节机械臂调节夹手的高低。
21、进一步的,s10之后还包括s11。
22、s11、视觉模块识别货架中另一货物的色块的摆放角度,若另一货物的色块的当前摆放角度与第一摆放角度不一致,则进行s12;若另一货物的色块的当前摆放角度与第一摆放角度一致,则重新进行s11对又一货物的色块的摆放角度进行识别。
23、s12、旋转装置和多关节机械臂驱动夹手与另一货物对准,然后夹手对货物进行夹持,旋转装置和多关节机械臂驱动夹手动作,使得色块的当前摆放角度与第一摆放角度一致。
24、s13、重复进行s10-s11,对货架中其余货物的摆放角度进行调整。
25、以上方法,通过视觉模块对货架中其余货物的色块的当前摆放角度进行识别,从而将与第一摆放角度不一致的货物的进行调整;使得其余货物在货架中摆正。
26、进一步的,所述二维码中还设有货物的宽度数据;s6中,夹手夹取货物;具体为:根据货物的宽度数据调节夹手的张开角度;然后将货物夹紧。
27、以上方法,通过预设货物的宽度数据,在识别货物时获取货物的宽度,进而根据货物宽度调节夹手的张开角度;使得夹手的张开角度大于货物的宽度,实现对货物的稳定夹持。
技术特征:
1.一种基于颜色识别的货物夹取摆放方法,通过机器人实现,机器人包括底盘,在底盘底部设有行走装置,在底盘顶部设有夹取装置,夹取装置包括旋转装置和多关节机械臂,多关节机械臂设置在旋转装置上,多关节机械臂的一端设有夹手和视觉模块,其特征在于:
2.根据权利要求1所述的一种基于颜色识别的货物夹取摆放方法,其特征在于:s4中,旋转装置和多关节机械臂驱动夹手与货物对准;包括以下步骤:
3.根据权利要求1所述的一种基于颜色识别的货物夹取摆放方法,其特征在于:s10之后还包括s11;
4.根据权利要求1所述的一种基于颜色识别的货物夹取摆放方法,其特征在于:所述二维码中还设有货物的宽度数据;s6中,夹手夹取货物;具体为:根据货物的宽度数据调节夹手的张开角度;然后将货物夹紧。
技术总结
本发明提供一种基于颜色识别的货物夹取摆放方法,在货物上设置色块,增大色块与环境图像的色差,这样更好的识别货物在环境图像中的位置;避免货物的颜色与环境颜色接近,导致不能在环境图像中识别出货物的情况出现;然后通过LAB颜色阈值确定色块与环境图像的色差,从而准确获取货物的位置;当夹取货物后,行走装置驱动机器人向货架移动,并将当前被夹取的货物放置在货架上;同时还通过视觉模块获取货物的当前摆放角度,若当前摆放角度与第一摆放角度不一致,则对货物进行调整,驱动货物绕自身高度方向进行周向旋转,使货物的当前摆放角度与第一摆放角度一致;从而使货物放置在货架后,货物在货架中摆正。
技术研发人员:缪文南,黄泽钦,冯雯静,周伟明,刘炎龙,黄莉,曹英烈
受保护的技术使用者:广州城市理工学院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!