塔机行走机构速度实时调节的方法、系统及控制器与流程
本申请涉及建筑机械,具体地涉及一种塔机行走机构速度实时调节的方法、系统及控制器。
背景技术:
1、行走过程是行走式机械设备的非常重要的一个环节,尤其是吊载行走。机械设备在行走时,需要专人在地面轨道旁指挥,防止障碍物或行人经过发生危险事故。目前,市场上的行走式机械设备在碰到限位时停的很快,戛然而止,抖动感、晃动感很强,行走效率也不高,而且对于障碍物也没有识别和减速控制,对地面指挥人员的要求高,风险大。因此,现有的技术方案存在塔机行走机构在遇到障碍物时,不能自动减速,以及减速不平稳和不精准的问题。
技术实现思路
1、本申请实施例的目的是提供一种塔机行走机构速度实时调节的方法、系统及控制器,用以解决现有技术中在塔机行走机构在遇到障碍物时,不能自动减速,以及减速不平稳和不精准的问题。
2、为了实现上述目的,本申请第一方面提供一种塔机行走机构速度实时调节的方法,应用于控制器,控制器与识别装置通信,该方法包括:
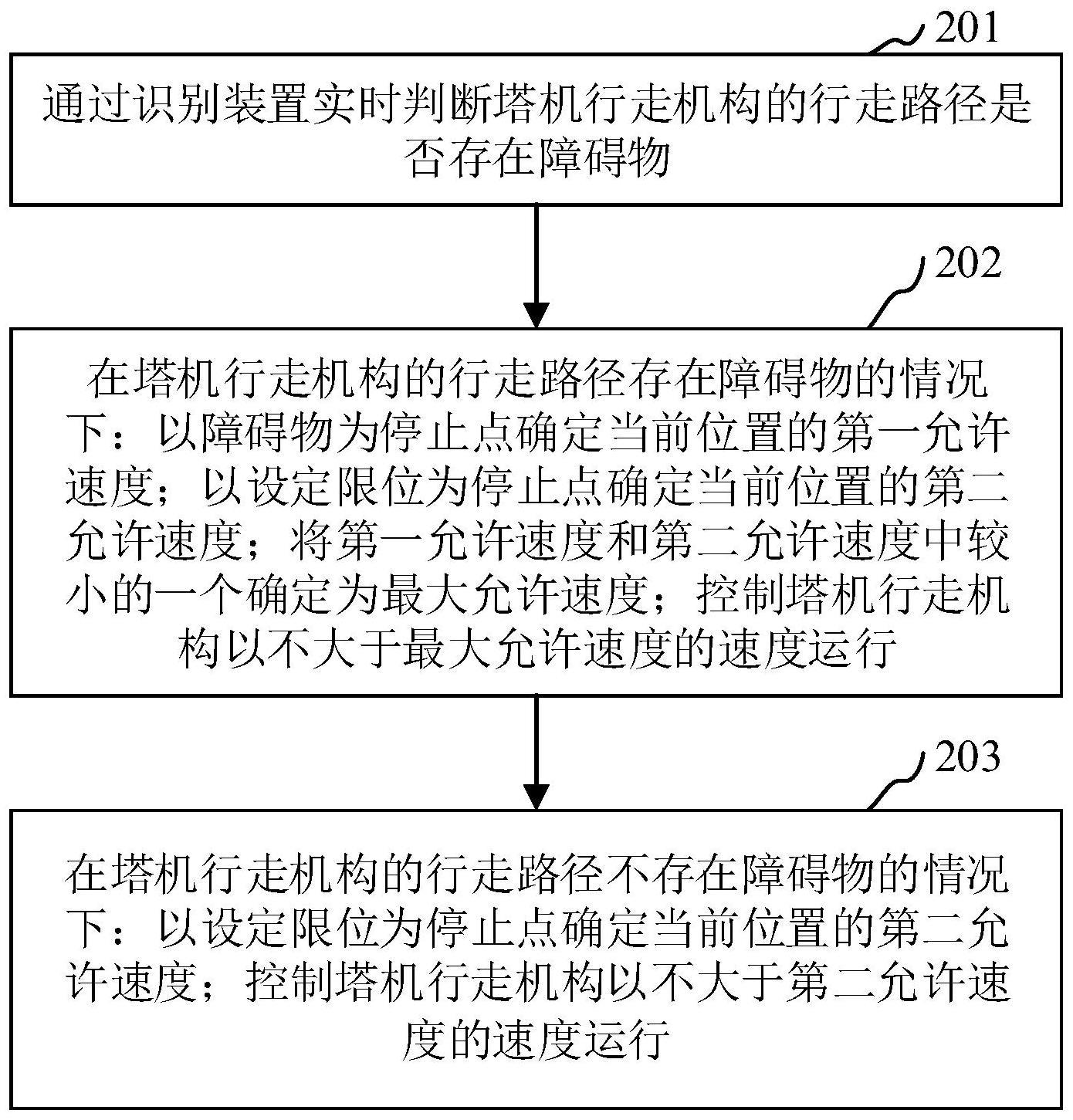
3、通过识别装置实时判断塔机行走机构的行走路径是否存在障碍物;
4、在塔机行走机构的行走路径存在障碍物的情况下:
5、以障碍物为停止点确定当前位置的第一允许速度;
6、以设定限位为停止点确定当前位置的第二允许速度;
7、将第一允许速度和第二允许速度中较小的一个确定为最大允许速度;
8、控制塔机行走机构以不大于最大允许速度的速度运行;
9、在塔机行走机构的行走路径不存在障碍物的情况下:
10、以设定限位为停止点确定当前位置的第二允许速度;
11、控制塔机行走机构以不大于第二允许速度的速度运行。
12、在本申请实施例中,控制器分别与测距装置和变频器通信,变频器与电机连接,并驱动电机运行,以障碍物为停止点确定当前位置的第一允许速度包括:
13、实时接收测距装置发送的塔机行走机构与障碍物的距离和变频器发送的塔机行走机构的当前速度;
14、获取塔机行走机构的减速时间、电机的额定速度、通讯延迟时间和程序执行时间;
15、根据减速时间、当前速度和额定速度确定塔机行走机构的停止时间;
16、根据通讯延迟时间和程序执行时间确定延迟时间;
17、根据塔机行走机构与障碍物的距离、停止时间和延迟时间确定第一允许速度。
18、在本申请实施例中,第一允许速度满足公式(1):
19、rlimitspeed1=rdistance/(rstoptime/2+rdelaytime); (1)
20、其中,rlimitspeed1为第一允许速度,rdistance为所述塔机行走机构与所述障碍物的距离,rstoptime为停止时间,delaytime为延迟时间。
21、在本申请实施例中,控制器还与编码器通信,以设定限位为停止点确定当前位置的第二允许速度包括:
22、实时接收编码器发送的塔机行走机构的当前位置;
23、获取塔机行走机构的设定限位;
24、根据当前位置、设定限位、停止时间和延迟时间确定塔机行走机构的第二允许速度。
25、在本申请实施例中,第二允许速度满足公式(2):
26、rlimitspeed2=abs(rendvalue-rnowvalue)/(rstoptime/2+rdelaytime);(2)
27、其中,rlimitspeed2为第二允许速度,rendvalue为设定限位,rnowvalue为当前位置,rstoptime为停止时间,delaytime为延迟时间。
28、在本申请实施例中,控制器还与报警装置通信,该方法还包括:
29、在障碍物与塔机行走机构的距离小于预设距离的情况下,发送报警指令至报警装置,以控制报警装置进行报警提示。
30、本申请第二方面提供一种控制器,包括:
31、存储器,被配置成存储指令;以及
32、处理器,被配置成从存储器调用指令以及在执行指令时能够实现根据上述的行走机构识别减速控制的方法。
33、本申请第三方面提供一种塔机行走机构速度实时调节的系统,包括:
34、根据上述的控制器;
35、识别装置,与控制器通信,被配置成识别塔机行走机构的行走路径是否存在障碍物;
36、变频器,与控制器通信,被配置成获取塔机行走机构的当前速度并发送至控制器,以及控制电机的转速;
37、编码器,与控制器通信,被配置成获取塔机行走机构的当前位置并发送至控制器;
38、测距装置,与控制器通信,被配置成获取塔机行走机构距离障碍物的距离,并发送至控制器;
39、电机,与变频器连接,被配置成根据变频器的指令调整转速。
40、在本申请实施例中,该系统还包括报警装置,报警装置与控制器通信,报警装置包括:
41、灯光报警单元,被配置成根据控制器的报警指令进行灯光报警提示;和/或
42、声音报警单元,被配置成根据控制器的报警指令进行声音报警提示;和/或
43、显示报警单元,被配置成根据控制器的报警指令进行显示报警提示。
44、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据上述的塔机行走机构速度实时调节的方法。
45、通过上述技术方案,通过识别装置实时判断塔机行走机构的行走路径是否存在障碍物。在塔机行走机构的行走路径存在障碍物的情况下,分别以障碍物和设定限位为停止点确定当前位置的第一允许速度和第二允许速度。并将第一允许速度和第二允许速度中较小的一个确定为最大允许速度。控制塔机行走机构以不大于最大允许速度的速度运行。在塔机行走机构的行走路径不存在障碍物的情况下,以设定限位为停止点确定当前位置的第二允许速度,并控制塔机行走机构以不大于第二允许速度的速度运行,可以对塔机行走机构的速度进行实时调节,提高塔机行走机构运行的稳定性。
46、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种塔机行走机构速度实时调节的方法,其特征在于,应用于控制器,所述控制器与识别装置通信,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述控制器分别与测距装置和变频器通信,所述变频器与电机连接,并驱动所述电机运行,所述以所述障碍物为停止点确定当前位置的第一允许速度包括:
3.根据权利要求2所述的方法,其特征在于,所述第一允许速度满足公式(1):
4.根据权利要求2所述的方法,其特征在于,所述控制器还与编码器通信,所述以设定限位为停止点确定当前位置的第二允许速度包括:
5.根据权利要求4所述的方法,其特征在于,所述第二允许速度满足公式(2):
6.根据权利要求1所述的方法,其特征在于,所述控制器还与报警装置通信,所述方法还包括:
7.一种控制器,其特征在于,包括:
8.一种塔机行走机构速度实时调节的系统,其特征在于,包括:
9.根据权利要求8所述的系统,其特征在于,所述系统还包括报警装置,所述报警装置与所述控制器通信,所述报警装置包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至6中任一项所述的塔机行走机构速度实时调节的方法。
技术总结
本申请公开了一种塔机行走机构速度实时调节的方法、系统及控制器。该方法包括:通过识别装置实时判断塔机行走机构的行走路径是否存在障碍物;在行走路径存在障碍物的情况下:以障碍物为停止点确定当前位置的第一允许速度;以设定限位为停止点确定当前位置的第二允许速度;将第一允许速度和第二允许速度中较小的一个确定为最大允许速度;控制塔机行走机构以不大于最大允许速度的速度运行;在行走路径不存在障碍物的情况下:以设定限位为停止点确定当前位置的第二允许速度;控制塔机行走机构以不大于第二允许速度的速度运行。本申请通过确定不同情况下最大允许速度对塔机行走机构的速度进行实时调节,可以提高塔机行走机构运行的稳定性。
技术研发人员:王锋,赵志卫
受保护的技术使用者:中联重科建筑起重机械有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!