输送装置以及传送带纠偏方法与流程
本发明涉及输送线设备,尤其涉及一种输送装置以及传送带纠偏方法。
背景技术:
1、传送带输送设备技术领域,经常会因为两端传送辊筒的不完全平行、传送带上因放置品而导致张力不同等多方面因素,致使传送带在动作时容易逐步向张力较大的一侧移动,对于一些柔性的传送带,在传送过程中积累的偏斜量会导致传送带向一侧堆积,影响传输效果且容易导致设备的损坏。
2、目前市场上主流的输送线防偏斜设备,主要以物理限位、反复调节输送滚筒的角度等方式对传送带进行纠偏,采用物理限位方式对于较薄的传送带容易致使传送带变形,且对于两端撑紧的传送带而言,其本身不具有良好的限位效果,而通过反复调角度的方式对传送带进行纠偏,其很难将两侧传送辊筒完全调节平行,且因为输送线上重物的重心容易朝向一侧偏斜,因此即使在调节至较为理想的状态后仍然容易发生偏斜。还有的增加专门用于调节角度的辊轮,这增加了装置的成本,也增加了传送带的磨损面积。
3、因此,亟需设计一种输送装置以及传送带纠偏方法,以解决上述问题。
技术实现思路
1、本发明的一个目的在于提供一种输送装置,其上的传送带在纠偏过程中受到的磨损小,且辊轮无需转角或者移动,提高输送装置的使用寿命,降低传送带纠偏的操作难度。
2、本发明的另一个目的在于提供一种传送带纠偏方法,对传送带的磨损小,纠偏操作简单且精准。
3、为达此目的,本发明采用以下技术方案:
4、输送装置,包括:
5、安装架体,沿第一方向延伸;
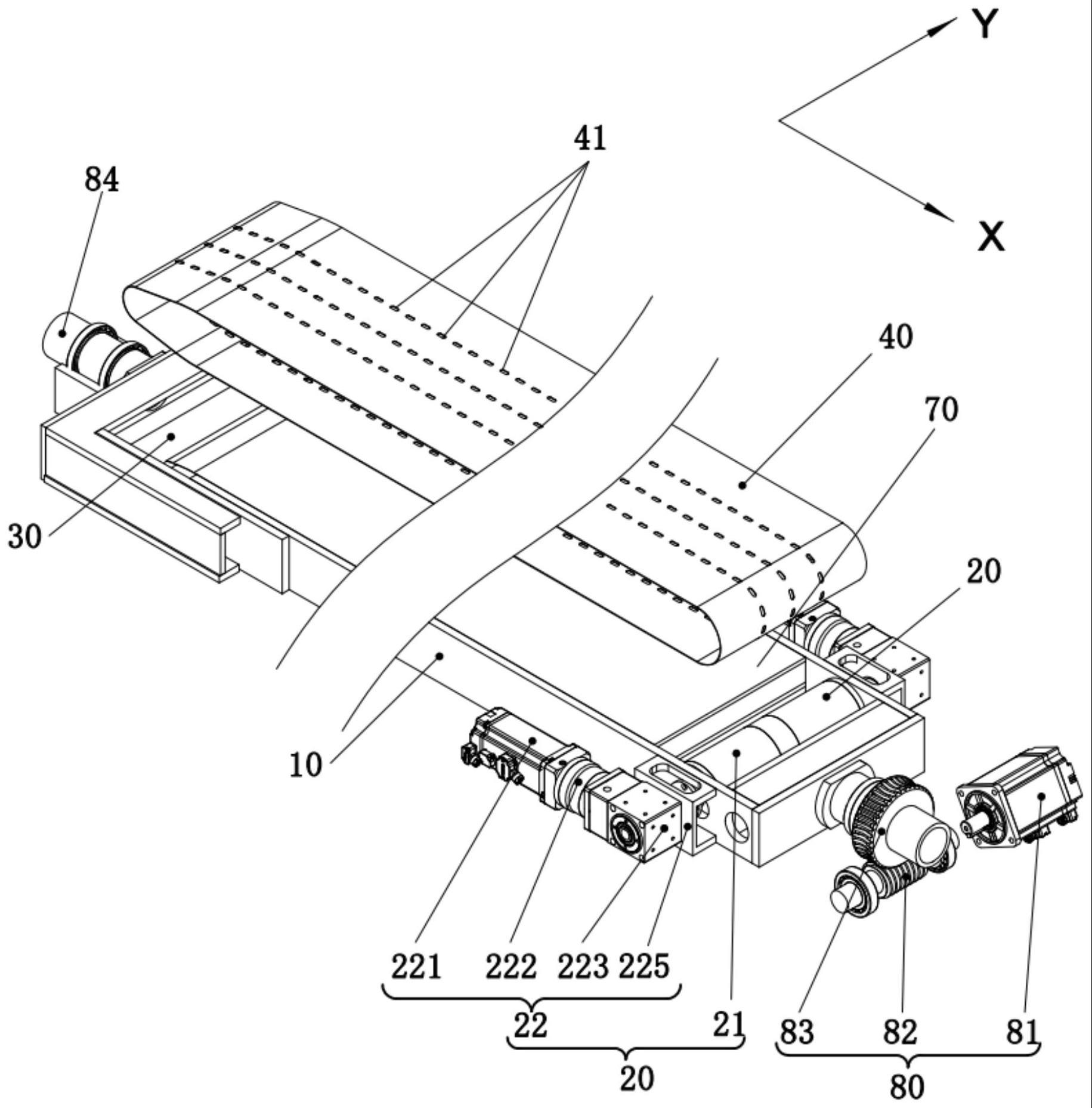
6、两个主动辊轮机构,位于上述安装架体在上述第一方向的一端,上述主动辊轮机构包括辊轮和驱动组件,上述驱动组件安装于上述安装架体的一侧,上述辊轮能与上述驱动组件的输出端连接,上述辊轮的轴向沿第二方向延伸,上述驱动组件能驱动对应的上述辊轮转动,两个上述主动辊轮机构中的两个上述辊轮同轴枢接,每个上述辊轮均与上述安装架体枢接,上述第一方向与上述第二方向垂直;
7、从动辊轮,枢接于上述安装架体的另一端;
8、传送带,一端套设两个上述辊轮外,另一端套设上述从动辊轮外,并被张紧;
9、检测机构,安装于上述安装架体并与上述驱动组件通讯连接,上述检测机构用于检测上述传送带在上述第二方向上的偏移情况。
10、作为一个可选的方案,上述传送带发生偏移后,上述驱动组件能向上述辊轮输出不同转矩,以使上述传送带向转矩大的上述辊轮一侧回正;或
11、偏移侧的上述驱动组件停止驱动对应的上述辊轮,由远离侧的上述驱动组件驱动对应的上述辊轮转动以使上述传送带转动,偏移侧的上述辊轮随上述传送带的转动而随动。
12、作为一个可选的方案,上述辊轮包括:
13、连接轴,一端能与上述驱动组件的输出端连接,上述驱动组件能驱动上述连接轴转动,上述连接轴枢接于上述安装架体的一侧;
14、本体部,一端与上述连接轴的另一端同轴连接,两个上述本体部背离上述连接轴的一端枢接设置。
15、作为一个可选的方案,上述输送装置还包括枢接件,上述枢接件沿上述第二方向延伸,两个上述本体部均呈筒状并分别插入上述枢接件的两端,两个上述本体部能绕上述枢接件同轴转动。
16、作为一个可选的方案,上述枢接件包括:
17、轴部,沿上述第二方向延伸,两个上述本体部分别套设于上述轴部的两端;
18、凸起部,位于上述轴部上且凸设于上述轴部的外周,两个上述本体部分别位于上述凸起部的两侧,上述凸起部以及两个上述本体部共同支撑上述传送带的一端。
19、作为一个可选的方案,上述输送装置还包括真空吸附腔室,上述真空吸附腔室安装于上述安装架体,上述真空吸附腔室和上述传送带上均开设有多个吸附孔,上述传送带上的吸附孔能够在传送过程中贴合真空吸附腔室的吸附孔并对传送带上方的被传送带进行吸附。
20、传送带纠偏方法,使用上述的输送装置,作为一个可选的方案,上述传送带的偏移侧的对侧为远离侧,上述传送带纠偏方法包括:
21、s10:上述检测机构检测到上述传送带在上述第二方向的偏移侧;
22、s20:远离侧的上述驱动组件转动,远离侧的上述辊轮驱动上述传送带转动,偏移侧的上述驱动组件停止驱动对应的上述辊轮,偏移侧的上述辊轮跟随上述传送带的转动而随动;或
23、上述驱动组件控制对应的上述辊轮转速不变,远离侧的上述驱动组件提高输出转矩;
24、s30:上述传送带向远离侧移动,直至上述检测机构检测到上述传送带归正后,两个驱动组件均对对应的上述辊轮恢复正常的驱动方式。
25、作为一个可选的方案,传送件为电池片,多个上述电池片形成电池片组在上述传送带上传送,上述传送带纠偏方法还包括s11,上述s11位于上述s10和上述s20之间,上述s11为:
26、判断上述检测机构检测出偏移侧时,是否处于每个上述电池片组的传送初始阶段,若是,则执行s20,若不是,则继续传送上述电池片,直至判断结果为是,执行s20。
27、作为一个可选的方案,上述电池片通过机械手抓取至上述传送带上,每个上述电池片组的电池片个数为n,上述机械手能计数抓取上述电池片的个数从1-n循环,两个上述驱动组件均与上述机械手通讯连接,当上述机械手计数为n时,s11中,判断结果为是。
28、作为一个可选的方案,在执行上述s10-上述s30时采用pid控制方式对驱动组件进行干涉。
29、本发明的有益效果在于:
30、本发明提供一种输送装置,通过将两个辊轮枢接后共同在传送带的一端对传送带提供主动输送力,当检测机构检测到传送带向偏移侧偏移时,可以采取两种传送带纠偏方式,第一种纠偏方式为,偏移侧的辊轮与对应的驱动组件分离,远离侧的驱动组件驱动对应的辊轮转速不变,该种方式纠偏时,远离侧的辊轮成为主动辊轮,带动传送带转动,偏移侧的辊轮在传送带绷紧情况下的摩擦力的带动下转动,此时,传送带由于远离侧辊轮的施力方向具有朝向远离侧分力,使得传送带向远离侧移动后归正,检测机构检测到传送带归正后两个驱动组件均回到正常同步驱动的状态;第二种纠偏方式为,两个驱动组件均控制对应的辊轮的转速不变,远离侧的驱动组件改变输出转矩,使得远离侧的辊轮具有更大的转矩,同样使得传送带由于远离侧辊轮的施力方向具有朝向远离侧分力,使得传送带向远离侧移动后归正,检测机构检测到传送带归正后两个驱动组件均回到正常同步驱动的状态,以上两种纠偏方式均无需在输送装置上新增新的调节辊反复调节角度,调节方式简单,也不用在输送装置增加直接与传送带边缘抵接的物理限位,避免了传送带过多的摩擦,减少对传送带的硬性摩擦,延长传送带的使用寿命,提高输送装置的使用寿命,且纠偏方式简单,降低传送带纠偏的操作难度。
31、本发明还提供一种传送带纠偏方法,通过采用上述输送装置,降低了纠偏对传送带的磨损,可以使传送带的传送作用逐步趋于稳定,纠偏操作简单且精准。
技术特征:
1.输送装置,其特征在于,包括:
2.根据权利要求1所述的输送装置,其特征在于,所述传送带(40)发生偏移后,所述驱动组件(22)能向所述辊轮(21)输出不同转矩,以使所述传送带(40)向转矩大的所述辊轮(21)一侧回正;或
3.根据权利要求1所述的输送装置,其特征在于,所述辊轮(21)包括:
4.根据权利要求3所述的输送装置,其特征在于,所述输送装置还包括枢接件(60),所述枢接件(60)沿所述第二方向延伸,两个所述本体部(212)均呈筒状并分别插入所述枢接件(60)的两端,两个所述本体部(212)能绕所述枢接件(60)同轴转动。
5.根据权利要求4所述的输送装置,其特征在于,所述枢接件(60)包括:
6.根据权利要求1-5任一项所述的输送装置,其特征在于,所述输送装置还包括真空吸附腔室(70),所述真空吸附腔室(70)安装于所述安装架体(10),所述真空吸附腔室(70)和所述传送带(40)上均开设有多个吸附孔(41),所述传送带(40)上的吸附孔(41)能够在传送过程中贴合真空吸附腔室(70)的吸附孔(41)并对传送带(40)上方的被传送带进行吸附。
7.传送带纠偏方法,使用如权利要求1-6任一项所述的输送装置,其特征在于,所述传送带(40)的偏移侧的对侧为远离侧,所述传送带纠偏方法包括:
8.根据权利要求7所述的传送带纠偏方法,其特征在于,传送件为电池片,多个所述电池片形成电池片组在所述传送带(40)上传送,所述传送带纠偏方法还包括s11,所述s11位于所述s10和所述s20之间,所述s11为:
9.根据权利要求8所述的传送带纠偏方法,其特征在于,所述电池片通过机械手抓取至所述传送带(40)上,每个所述电池片组的电池片个数为n,所述机械手能计数抓取所述电池片的个数从1-n循环,两个所述驱动组件(22)均与所述机械手通讯连接,当所述机械手计数为n时,s11中,判断结果为是。
10.根据权利要求8所述的传送带纠偏方法,其特征在于,在执行所述s10-所述s30时采用pid控制方式对驱动组件(22)进行干涉。
技术总结
本发明属于输送线设备技术领域,公开了一种输送装置以及传送带纠偏方法。该输送装置包括安装架体、从动辊轮、传动带、检测机构以及两个主动辊轮机构;两个主动辊轮机构均位于安装架体的在第一方向的一端,主动辊轮机构包括辊轮和驱动组件,驱动组件安装于安装架体的一侧,辊轮能与驱动组件的输出端连接,辊轮的轴向沿第二方向延伸,驱动组件能驱动对应的辊轮转动,两个辊轮机构中的两个辊轮同轴枢接,每个辊轮均与安装架体枢接;从动辊轮枢接于安装架体的另一端;检测机构安装于安装架体并与驱动组件通讯连接,检测机构用于检测传送带在第二方向上的偏移情况。提高输送装置的使用寿命,降低传送带纠偏的操作难度。
技术研发人员:肖建勇,王凤山,刘念,姜欢欢
受保护的技术使用者:苏州智慧谷激光智能装备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!