机器人及接驳方法与流程
本申请涉及机器人,特别涉及一种机器人及接驳方法。
背景技术:
1、在无人仓储、物流、医院、工厂等领域,越来越多形式的机器人慢慢取代人工进行物品转运。机器人按照导航路径移动到对接平台处,并与对接平台实现对接,位于对接平台上的货物通过输送装置被传输到机器人上,机器人完成接驳货物。
2、现有的机器人接驳方式主要是顶升式、牵引式,这两种方式主要是对接货架,完成货架的接驳。但顶升式、牵引式对接方式存在对接不准,转运不稳的问题,货架不能平稳地传输到对接平台,最终导致机器人的接驳效率降低。
技术实现思路
1、本申请实施例的目的在于提供一种机器人及接驳方法,通过在机器人上增设对接传动装置,实现机器人与接驳设备的无人化对接及物品的自动转移,采用本申请的方法,能够实现无人化物流仓储作业,提高了仓储物流的效率。
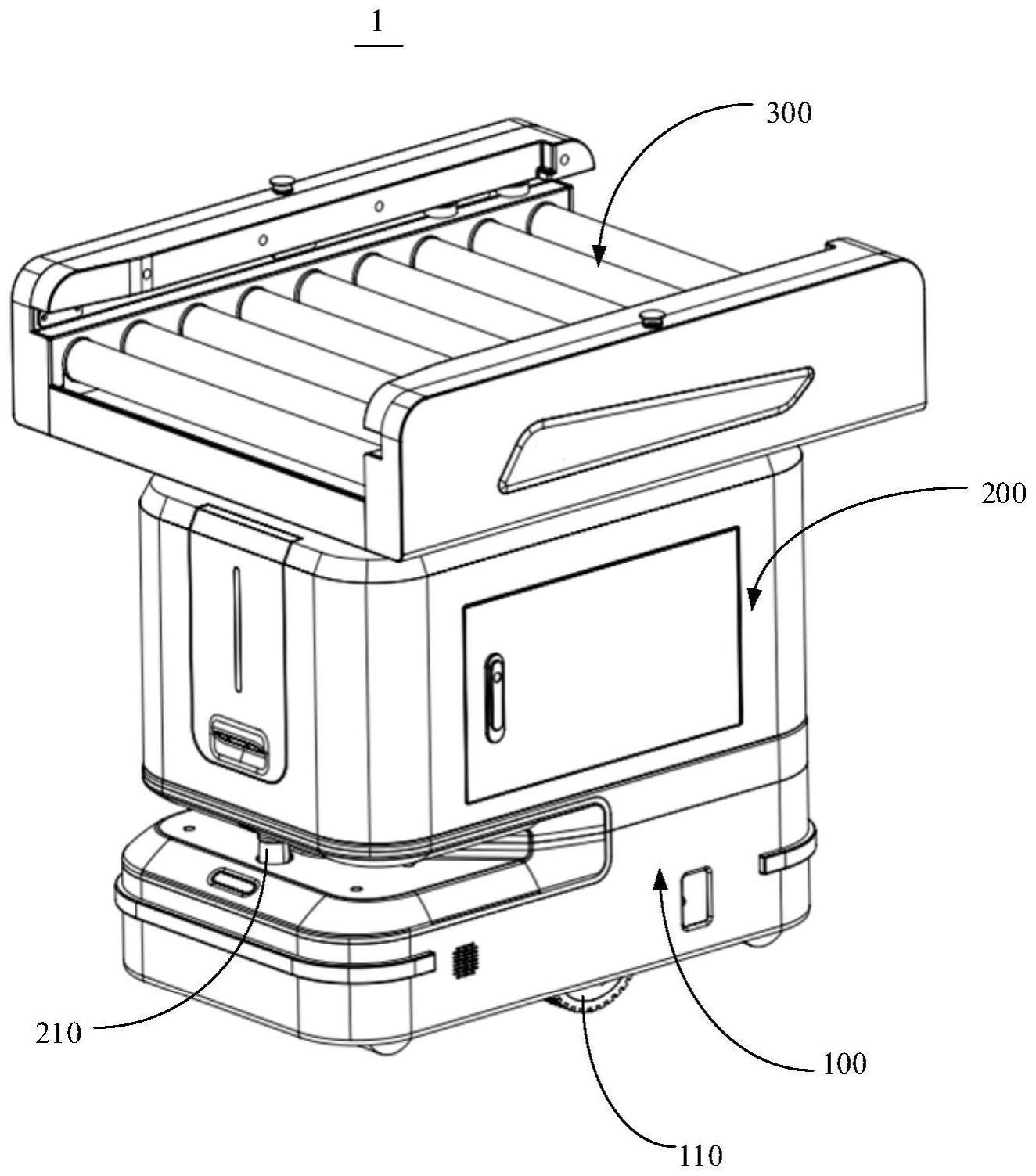
2、第一方面,本申请提供一种机器人,包括:底盘;箱体,设于所述底盘上;对接传动装置,设于所述箱体上;其中,所述对接传动装置包括:底座;传送组件,沿第一方向,能转动的设于所述底座上;以及导向组件,沿第二方向,能转动的设于所述底座上;所述第一方向与所述第二方向平行。
3、于一实施例中,所述底座上设有固定板,所述固定板设于所述传送组件上方,用于限位。
4、于一实施例中,所述传送组件包括:驱动件,设于所述底座内;转动件,设于所述底座上,所述驱动件与所述转动件连接。
5、于一实施例中,所述转动件设有至少一个,其中的一个所述转动件与所述驱动件连接,相邻的所述转动件之间通过传动件连接。
6、于一实施例中,所述导向组件包括:导向转动件;所述盖板与所述导向板连接,所述导向板位于所述固定板上端,所述导向转动件设于所述导向板与所述固定板之间的空间区域内。
7、于一实施例中,所述机器人还包括:高度调节装置,与所述箱体以及所述对接传动装置连接。
8、于一实施例中,所述高度调节装置包括:固定底板,与所述箱体连接;活动板,一端通过调节组件与所述固定底板连接,另一端与所述对接传动装置连接。
9、于一实施例中,所述活动板包括:第一连接板以及第二连接板,所述第一连接板与所述第二连接板连接,所述固定底板设于所述第一连接板和所述第二连接板之间;所述调节组件依次穿过所述第一连接板以及所述固定底板;所述第二连接板与所述对接传动装置连接。
10、于一实施例中,所述第二连接板上设有定位块,所述底座上设有与所述定位块匹配的定位槽。
11、第二方面,本申请提供一种接驳方法,应用于本申请第一方面任一项实施例所述的机器人,所述方法包括:
12、控制所述机器人按照第一预设导航路径移动到中转站,所述中转站上存储有待接驳货物;
13、控制对接传动装置运转,接收所述中转站传输的所述待接驳货物;
14、根据所述待接驳货物在所述对接传动装置上的到位提示信息,控制所述机器人离开所述中转站,并按照第二预设导航路径移动到接驳设备;
15、控制所述对接传动装置运转,将所述待接驳货物传输至所述接驳设备内。
16、本申请方案中,通过在机器人上增设对接传动装置,实现机器人与接驳设备的无人化对接及物品的自动转移,采用本申请的方法,能够实现无人化物流仓储作业,提高了仓储物流的效率。
技术特征:
1.一种机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,所述底座上设有固定板,所述固定板设于所述传送组件上方,用于限位。
3.根据权利要求1所述的机器人,其特征在于,所述传送组件包括:
4.根据权利要求3所述的机器人,其特征在于,所述转动件设有至少一个,其中的一个所述转动件与所述驱动件连接,相邻的所述转动件之间通过传动件连接。
5.根据权利要求2所述的机器人,其特征在于,所述导向组件包括:导向转动件;
6.根据权利要求1所述的机器人,其特征在于,所述机器人还包括:高度调节装置,与所述箱体以及所述对接传动装置连接。
7.根据权利要求6所述的机器人,其特征在于,所述高度调节装置包括:
8.根据权利要求7所述的机器人,其特征在于,所述活动板包括:第一连接板以及第二连接板,所述第一连接板与所述第二连接板连接,所述固定底板设于所述第一连接板和所述第二连接板之间;
9.根据权利要求8所述的机器人,其特征在于,所述第二连接板上设有定位块,所述底座上设有与所述定位块匹配的定位槽。
10.一种接驳方法,其特征在于,应用于权利要求1-9任一项所述的机器人,所述方法包括:
技术总结
本申请提供一种机器人及接驳方法,所述机器人包括:底盘;箱体,设于底盘上;对接传动装置,设于箱体上;其中,对接传动装置包括:底座;传送组件,沿第一方向,能转动的设于底座上;以及导向组件,沿第二方向,能转动的设于底座上;第一方向与第二方向平行。本申请通过在机器人上增设对接传动装置,实现机器人与接驳设备的无人化对接及物品的自动转移。采用本申请的方法,能够实现无人化物流仓储作业,提高了仓储物流的效率。
技术研发人员:冯义兴,潘晶,刘伟,王平,杨帅,张满圆
受保护的技术使用者:上海钛米机器人股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!