一种行车吊装方法与流程
本发明涉及行车吊装领域,具体涉及一种行车吊装方法。
背景技术:
1、产品在厂区制造过程中,一个产品要经过许多道工序加工处理,制冷领域中诸如冷水机组这样的大件产品,在多道工序之间流转存在着诸多不便,往往需要行车进行调度。利用行车将产品从一道工序位置吊装运送到下一道工序位置。生产车间中人和物同在,为保证安全性,现有的车间行车调度离不开人来确定吊装位置和路径,无法提供智能化的吊装服务,行车调用效率有待提升。机组放入底盘时需要调整底盘或机组位置,多次来回移动底盘,往往还需要人工多次调整机组角度。这个过程会耗费较多工时,且吊装存在较大的安全隐患。
技术实现思路
1、发明目的:本发明的目的是提供一种行车吊装方法,实现智能化的吊装服务,提高行车调度效率和安全性。
2、技术方案:一种行车吊装方法,包括以下步骤:
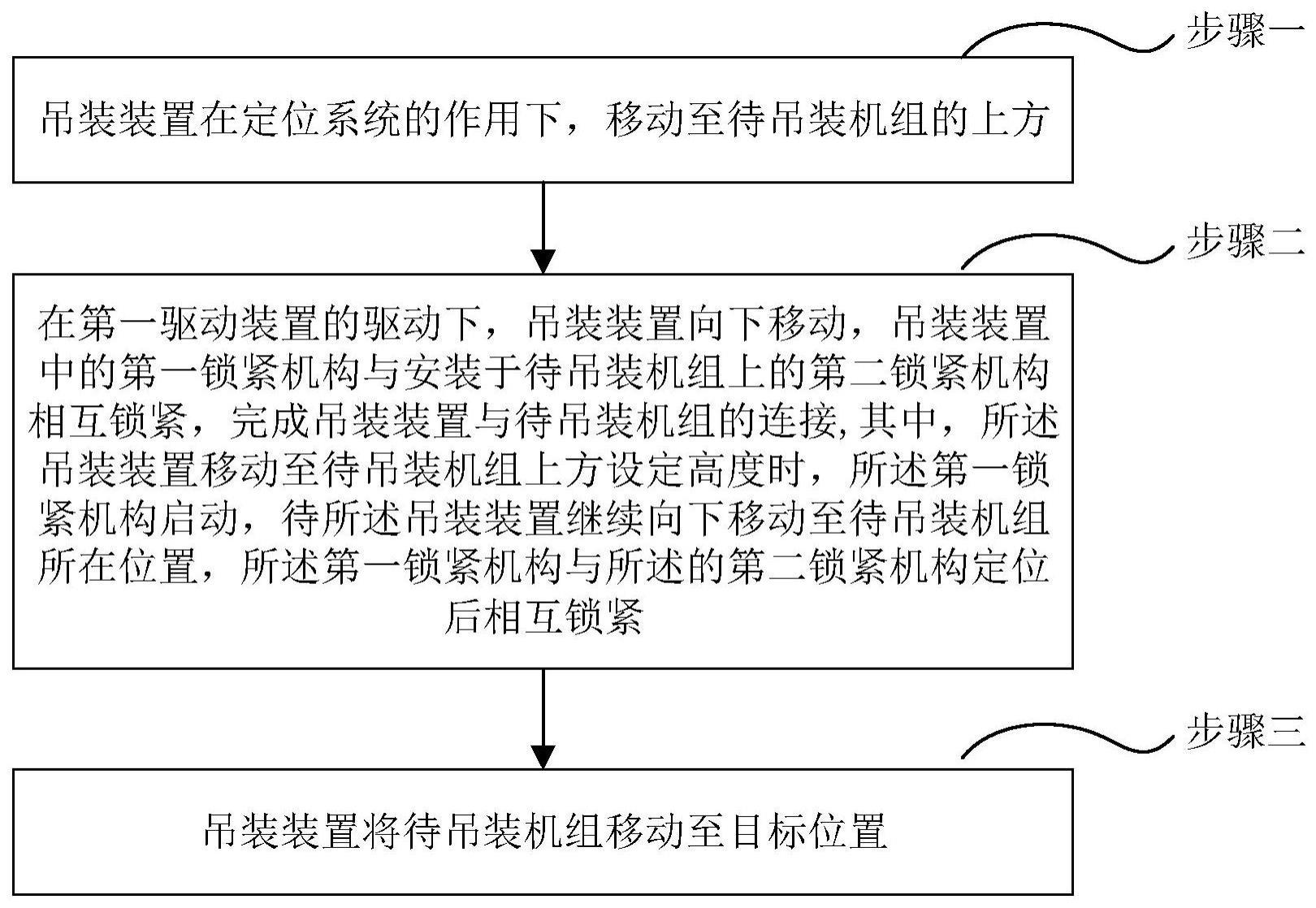
3、吊装装置在定位系统的作用下,移动至待吊装机组的上方;
4、在第一驱动装置的驱动下,吊装装置向下移动,吊装装置中的第一锁紧机构与安装于待吊装机组上的第二锁紧机构相互锁紧,完成吊装装置与待吊装机组的连接,其中,所述吊装装置移动至待吊装机组上方设定高度时,所述第一锁紧机构启动,待所述吊装装置继续向下移动至待吊装机组所在位置,所述第一锁紧机构与所述的第二锁紧机构定位后相互锁紧;
5、吊装装置将待吊装机组移动至目标位置。
6、进一步地,所述定位系统包括用于所述吊装装置的横向定位的第一定位轨道以及用于所述吊装装置纵向定位的第二定位轨道;所述第一定位轨道上设置有若干个第一行程开关,所述第一行程开关沿着所述第一定位轨道间隔均匀设置;所述第二定位轨道上设置有若干个第二行程开关,所述第二行程开关沿着所述第二定位轨道间隔均匀设置。
7、进一步地,所述第一锁紧机构包括第一壳体、设置于所述第一壳体上的第一插销,所述第一插销上设置有第一闭锁机构;
8、所述第二锁紧机构包括第二壳体、设置于所述第二壳体上的第二插销,所述第二插销上设置有与所述第一闭锁机构配合设置的第二闭锁机构,所述第二闭锁机构用于容纳和限位所述第一闭锁机构。
9、进一步地,所述第一壳体下端设置有第一定位触点,所述第二壳体上端设置有第二定位触点,所述第一定位触点和所述第二定位触点用于所述第一锁紧机构和所述第二锁紧机构对准。
10、进一步地,所述目标位置设置有用于支撑待吊装机组的支撑底盘;所述支撑底盘上设置有用于待吊装机组定位的定位机构;吊装装置根据所述定位机构的反馈信号,将待吊装机组放置于所述支撑底盘上。
11、进一步地,所述定位机构包括用于检测待吊装机组边缘位置的第一定位机构、第二定位机构、第三定位机构、和第四定位机构;
12、待吊装机组距离所述支撑底盘至设定高度,所述定位机构开始启动待吊装机组的位置识别。
13、进一步地,当待吊装机组放置于所述支撑底盘时,所述吊装装置的第一锁紧机构与所述第二锁紧机构解锁。
14、进一步地,所述支撑底盘设置于所述第一行程开关与所述第二行程开关在横向和纵向相交处。
15、进一步地,所述方法包括:利用障碍物检测系统检测所述吊装装置移动路径上是否存在障碍物;当所述障碍物检测系统检测存在障碍物,则触发所述吊装装置的中断暂停程序,直到障碍物被清除为止,所述第一定位轨道将所述吊装装置移动至原始位置后,再次在所述定位系统的作用下,将所述吊装装置移动至目标位置。
16、进一步地,所述吊装装置根据按照优先级排序存储于控制器的存储器队列中的吊装指令执行吊装任务,当收到优先级高于当前队列优先级的加急指令时,所述吊装装置判断是否与待吊装机组完成连接,若已连接,则存储加急指令至队列,否则触发所述吊装装置中断暂停当前任务,按照加急指令执行吊装任务,在加急指令请求的吊装任务完成后,恢复队列并继续执行被中断的吊装任务。
17、有益效果:本发明通过定位系统实现吊装装置自主定位至吊装设备位置,吊装装置和待吊装设备自主定位锁紧,实现自动化吊装,车间行车跨度内任意区域都能够发送吊装任务,行车按顺序执行任务,自动调动机组挪动至不同位置实现流水线化生产,提高行车调度使用的效率,提高流程的规范化和安全化水平。
技术特征:
1.一种行车吊装方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的行车吊装方法,其特征在于,所述定位系统(200)包括用于所述吊装装置(100)的横向定位的第一定位轨道(201)以及用于所述吊装装置(100)纵向定位的第二定位轨道(202);所述第一定位轨道(201)上设置有若干个第一行程开关(2011),所述第一行程开关(2011)沿着所述第一定位轨道(201)间隔均匀设置;所述第二定位轨道(202)上设置有若干个第二行程开关(2021),所述第二行程开关(2021)沿着所述第二定位轨道(202)间隔均匀设置。
3.根据权利要求1所述的行车吊装方法,其特征在于,所述第一锁紧机构(102)包括第一壳体(1021)、设置于所述第一壳体(1021)上的第一插销(1022),所述第一插销(1022)上设置有第一闭锁机构(1023);
4.根据权利要求3所述的行车吊装方法,其特征在于,所述第一壳体(1021)下端设置有第一定位触点,所述第二壳体(1031)上端设置有第二定位触点,所述第一定位触点和所述第二定位触点用于所述第一锁紧机构(102)和所述第二锁紧机构(103)对准。
5.根据权利要求1所述的行车吊装方法,其特征在于,所述目标位置设置有用于支撑待吊装机组的支撑底盘(301);所述支撑底盘(301)上设置有用于待吊装机组定位的定位机构(302);吊装装置(100)根据所述定位机构(302)的反馈信号,将待吊装机组放置于所述支撑底盘(301)上。
6.根据权利要求5所述的行车吊装方法,其特征在于,所述定位机构(302)包括用于检测待吊装机组边缘位置的第一定位机构(3021)、第二定位机构(3022)、第三定位机构(3023)、和第四定位机构(3024);
7.根据权利要求6所述的行车吊装方法,其特征在于,当待吊装机组放置于所述支撑底盘(301)时,所述吊装装置(100)的第一锁紧机构(102)与所述第二锁紧机构(103)解锁。
8.根据权利要求6所述的行车吊装方法,其特征在于,所述支撑底盘(301)设置于所述第一行程开关(2011)与所述第二行程开关(2021)在横向和纵向相交处。
9.根据权利要求1所述的行车吊装方法,其特征在于,包括:利用障碍物检测系统(500)检测所述吊装装置(100)移动路径上是否存在障碍物;当所述障碍物检测系统(500)检测存在障碍物,则触发所述吊装装置(100)的中断暂停程序,直到障碍物被清除为止,所述第一定位轨道将所述吊装装置(100)移动至原始位置后,再次在所述定位系统(200)的作用下,将所述吊装装置(100)移动至目标位置。
10.根据权利要求1所述的行车吊装方法,其特征在于,所述吊装装置(100)根据按照优先级排序存储于控制器的存储器队列中的吊装指令执行吊装任务,当收到优先级高于当前队列优先级的加急指令时,所述吊装装置(100)判断是否与待吊装机组(400)完成连接,若已连接,则存储加急指令至队列,否则触发所述吊装装置(100)中断暂停当前任务,按照加急指令执行吊装任务,在加急指令请求的吊装任务完成后,恢复队列并继续执行被中断的吊装任务。
技术总结
本发明公开了一种行车吊装方法,所述方法包括:吊装装置在定位系统的作用下,移动至待吊装机组的上方;在第一驱动装置的驱动下,吊装装置向下移动,吊装装置中的第一锁紧机构与安装于待吊装机组上的第二锁紧机构相互锁紧,完成吊装装置与待吊装机组的连接,其中,所述吊装装置移动至待吊装机组上方设定高度时,所述第一锁紧机构启动,待所述吊装装置继续向下移动至待吊装机组所在位置,所述第一锁紧机构与所述的第二锁紧机构定位后相互锁紧;吊装装置将待吊装机组移动至目标位置。本发明实现智能化的吊装服务,提高行车调度效率和安全性。
技术研发人员:何伟生,于俊坤,顾海华,李启林,桂林松
受保护的技术使用者:南京恒标斯瑞冷冻机械制造有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!