货叉装置及机器人的制作方法
本公开涉及仓储物流,尤其涉及一种货叉装置及机器人。
背景技术:
1、仓储是现代物流过程的一个重要组成部分。高效合理的仓储可以加快物资流动的速度,降低成本,保障生产的顺利进行,并以此实现对物流资源的有效控制与管理。
2、在仓储物流行业中,大多会采用搬运机器人对物料箱进行搬运,搬运机器人具有货叉装置。为了提高库位搬运效率,其货叉装置通常采用适用于多库位深度的伸缩臂结构,其中一些为多级传动式伸缩臂,由多级链条或同步带带动板式导轨伸缩滑动,还有一些则为剪叉式伸缩臂。
3、但是,随着库位深度不断增加,机械臂设置的单个节臂越来越长,或是设置的节数越来越多,直接导致货叉装置大型化,且物料箱的箱间距增加,从而使得仓储密度减小。
技术实现思路
1、本公开提供一种货叉装置及机器人,以解决现有货叉装置随着库位深度不断增加,机械臂设置的单个节臂越来越长,或是设置的节数越来越多,直接导致货叉装置大型化,且物料箱的箱间距增加,从而使得仓储密度减小的问题。
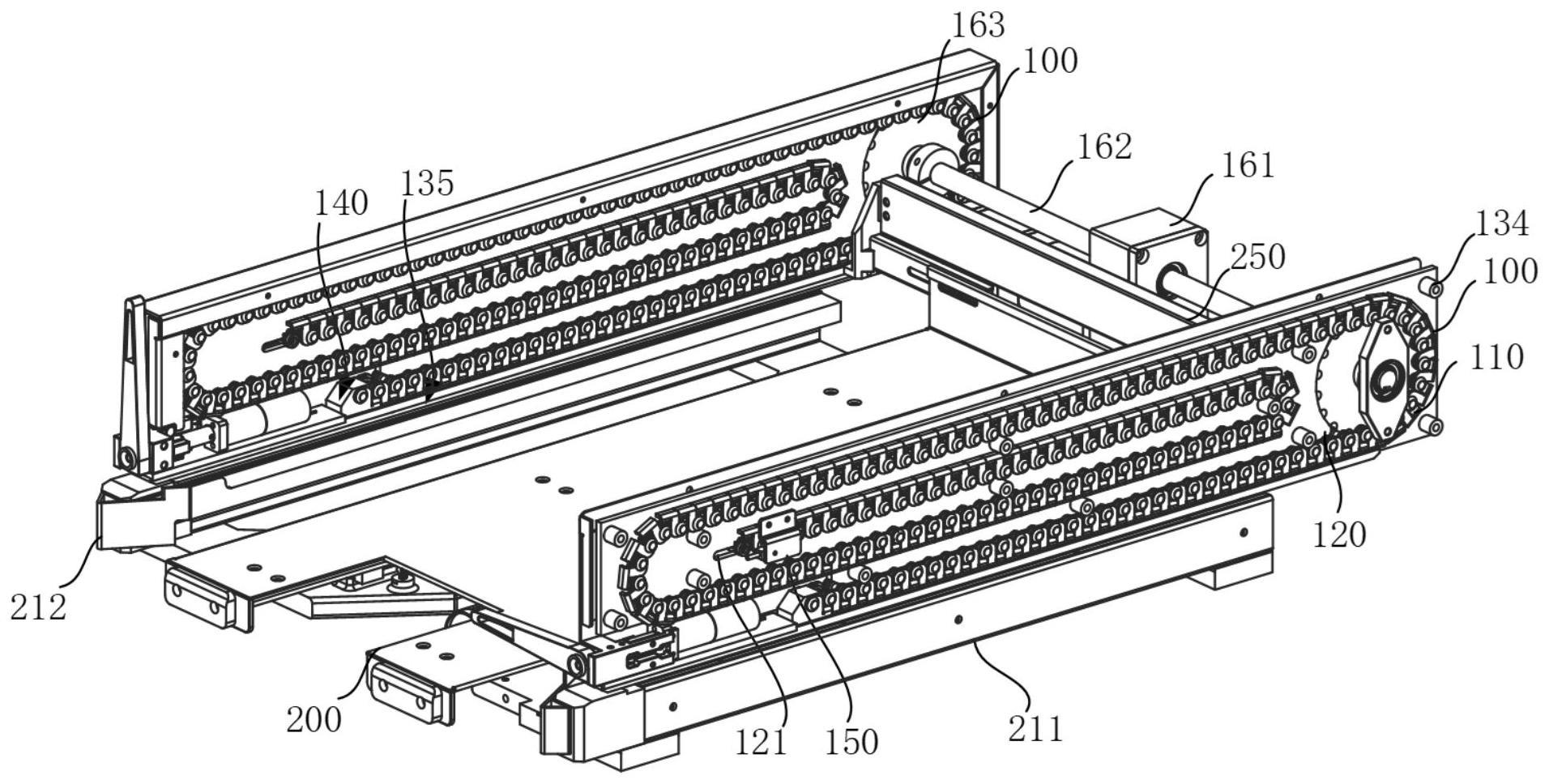
2、第一方面,本公开提供一种货叉装置,包括基座和至少一个伸缩臂组件,伸缩臂组件包括链条,伸缩臂组件设置在基座上;
3、链条可相对基座移动,以使链条缩回或部分伸出基座,在链条缩回时,链条在至少一个方向上向一侧弯曲,以呈弯曲状收纳,在链条部分伸出时,伸出的部分链条背向弯曲方向伸展,以取或放货物。
4、第二方面,本公开提供一种机器人,包括机器人本体和设置在机器人本体上的上述货叉装置;
5、机器人本体具有驱动装置和升降装置,驱动装置用于驱动机器人本体移动,并驱动升降装置升降,升降装置与货叉装置连接,以使货叉装置随升降组件升降。
6、本公开提供的货叉装置及机器人,在货叉装置上设置有伸缩臂组件和托盘。其中伸缩臂组件具有链条,在链条收缩时,可使其呈弯曲状设置在基座内,并且可以沿曲线盘旋收纳,以此减小伸缩臂组件的空间占用,并提高伸缩臂组件的空间利用率,而在链条伸出时,则可以朝向另一侧面刚性抵接,在自重作用下即可保持平直状伸出。随着库位深度的不断增加,仅需相应延长链条的长度即可,无需增加其他传动组件与支撑结构,进而使得伸缩臂组件及货叉装置的质量变化较小,结构更为简单,并且易于安装,避免了货叉装置大型化,进而防止了物料箱的箱间距随库位深度一同增加,从而保证仓储密度不会减小。
技术特征:
1.一种货叉装置,其特征在于,包括基座和至少一个伸缩臂组件,所述伸缩臂组件包括链条,所述伸缩臂组件设置在所述基座上;
2.根据权利要求1所述的货叉装置,其特征在于,所述链条包括多个链条组,所述链条组包括铰接轴和至少一个链板,所述链板上具有第一铰接部和第二铰接部,相邻两个所述链条组中一者的所述第一铰接部和另一者的所述第二铰接部通过另一者中的所述铰接轴铰接。
3.根据权利要求2所述的货叉装置,其特征在于,在所述链条弯曲时,所述链板相对于其上的至少一个所述铰接轴旋转,以在相邻两个所述链条组之间背向弯曲方向的一侧形成间隙,在所述链条伸展时,所述链板相对于其上的至少一个所述铰接轴反向旋转,以使所述间隙的间距逐渐减小,直至相邻两个所述链条组背向弯曲方向的一侧抵接。
4.根据权利要求2所述的货叉装置,其特征在于,所述第二铰接部和位于所述第二铰接部上的所述铰接轴固接。
5.根据权利要求4所述的货叉装置,其特征在于,所述链条组还包括隔套,所述隔套套设在所述铰接轴上,且所述隔套抵接在相邻两个所述链条组中一者的所述第一铰接部和另一者的所述第二铰接部之间。
6.根据权利要求2所述的货叉装置,其特征在于,所述链条具有第一端和第二端,所述第一端可伸出所述基座外,位于所述第一端的所述链条组中的两个所述第二铰接部均与该组中位于所述第二铰接部上的所述铰接轴铰接;
7.根据权利要求2所述的货叉装置,其特征在于,所述伸缩臂组件还包括安装板,所述安装板上具有弯曲状的导向部,所述链条绕设在所述导向部上。
8.根据权利要求7所述的货叉装置,其特征在于,所述导向部为开设在所述安装板上的滑槽,同一所述链条组中的所述铰接轴插设在滑槽上,同一所述链条组中包括至少两个所述链板且至少两个所述链板分别位于所述安装板相对的两面。
9.根据权利要求8所述的货叉装置,其特征在于,所述链板上具有翻边,同一所述链条组中的至少两个所述链板上的所述翻边均朝向所述安装板,以使所述安装板被夹设在至少两个所述链板上的翻边之间。
10.根据权利要求7所述的货叉装置,其特征在于,所述伸缩臂组件还包括收纳盒,所述收纳盒设置在所述基座上,所述安装板和所述链条位于所述收纳盒内,所述收纳盒上具有供所述链条出入的出入口。
11.根据权利要求10所述的货叉装置,其特征在于,所述收纳盒包括盒体和盒盖,所述盒体上具有朝向所述基座的开口,所述盒盖盖设在所述盒体上,以封闭至少部分所述开口;
12.根据权利要求11所述的货叉装置,其特征在于,所述伸缩臂组件还包括安装块,所述安装块连接在所述链条的伸出方向的端部;
13.根据权利要求12所述的货叉装置,其特征在于,所述安装块与所述铰接轴铰接,该所述铰接轴位于所述链条伸出端的所述链条组的所述第二铰接部上。
14.根据权利要求12所述的货叉装置,其特征在于,所述收纳盒还包括摩擦板,部分所述摩擦板经所述开口插设于所述盒体内,所述安装块和部分所述链条均与所述摩擦板固定连接。
15.根据权利要求10所述的货叉装置,其特征在于,所述伸缩臂组件还包括至少两个检测件,所述检测件设置在所述收纳盒或所述安装板上,所述检测件用于检测所述链条是否全部进入所述收纳盒内。
16.根据权利要求7-15任一项所述的货叉装置,其特征在于,还包括至少一个驱动组件,所述驱动组件驱动所述链条卷绕,以使所述链条相对于所述基座移动。
17.根据权利要求16所述的货叉装置,其特征在于,所述驱动组件包括驱动件、驱动轴和驱动链轮,所述驱动件通过所述驱动轴与所述驱动链轮连接;
18.根据权利要求1-15任一项所述的货叉装置,其特征在于,所述伸缩臂组件包括两个,并设置于所述基座的相对两侧,
19.根据权利要求18所述的货叉装置,其特征在于,还包括推板组件,所述推板组件包括至少一个推板和至少一个连接件,所述推板与所述连接件固接,所述收纳盒上具有朝向所述基座中心的导向槽,所述连接件经所述导向槽插设于所述收纳盒内,且与所述链条固接。
20.根据权利要求18所述的货叉装置,其特征在于,所述基座上设置扫描件,所述扫描件的扫描端朝向所述链条的伸出方向。
21.一种机器人,其特征在于,包括机器人本体和设置在所述机器人本体上的权利要求1-20任一项所述的货叉装置;
技术总结
本公开涉及仓储物流技术领域,尤其涉及一种货叉装置及机器人。货叉装置包括基座和至少一个伸缩臂组件,伸缩臂组件包括链条,伸缩臂组件设置在基座上;链条可相对基座移动,以使链条缩回或部分伸出基座,在链条缩回时,链条在至少一个方向上向一侧弯曲,以呈弯曲状收纳,在链条部分伸出时,伸出的部分链条背向弯曲方向伸展,以取或放货物。本公开的伸缩臂组件具有链条,在链条收缩时,可使其呈弯曲状盘旋收纳,以提高伸缩臂组件的空间利用率,而在链条伸出时,则可以在自重作用下平直状伸出,链条结构简单紧凑,易于安装,避免了货叉装置大型化,并以此保证仓储密度不会减小。
技术研发人员:张晓东
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!