一种智能遥控单轨运输机、控制方法及介质与流程
本申请涉及单轨运输领域,具体而言,涉及一种智能遥控单轨运输机、控制方法及介质。
背景技术:
1、运输机用于对货箱进行搬运,在进行搬运过程中通过设置轨道可以进行导向,现有的运输机均是通过双轨进行运输机的移动,增加了占用面积,同时双轨的设置会造成运输机在两个轨道上行驶速度出现偏差时,造成运输机较大的磨损,控制难度较高,此外,在部分受限空间内也无法得以有效施展,运输难度较大,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本申请实施例的目的在于提供一种智能遥控单轨运输机、控制方法及介质,可以通过智能远程控制运输机的位置及运输机的移动速度及移动方向,从而实现运输机在任意位置启停的技术。
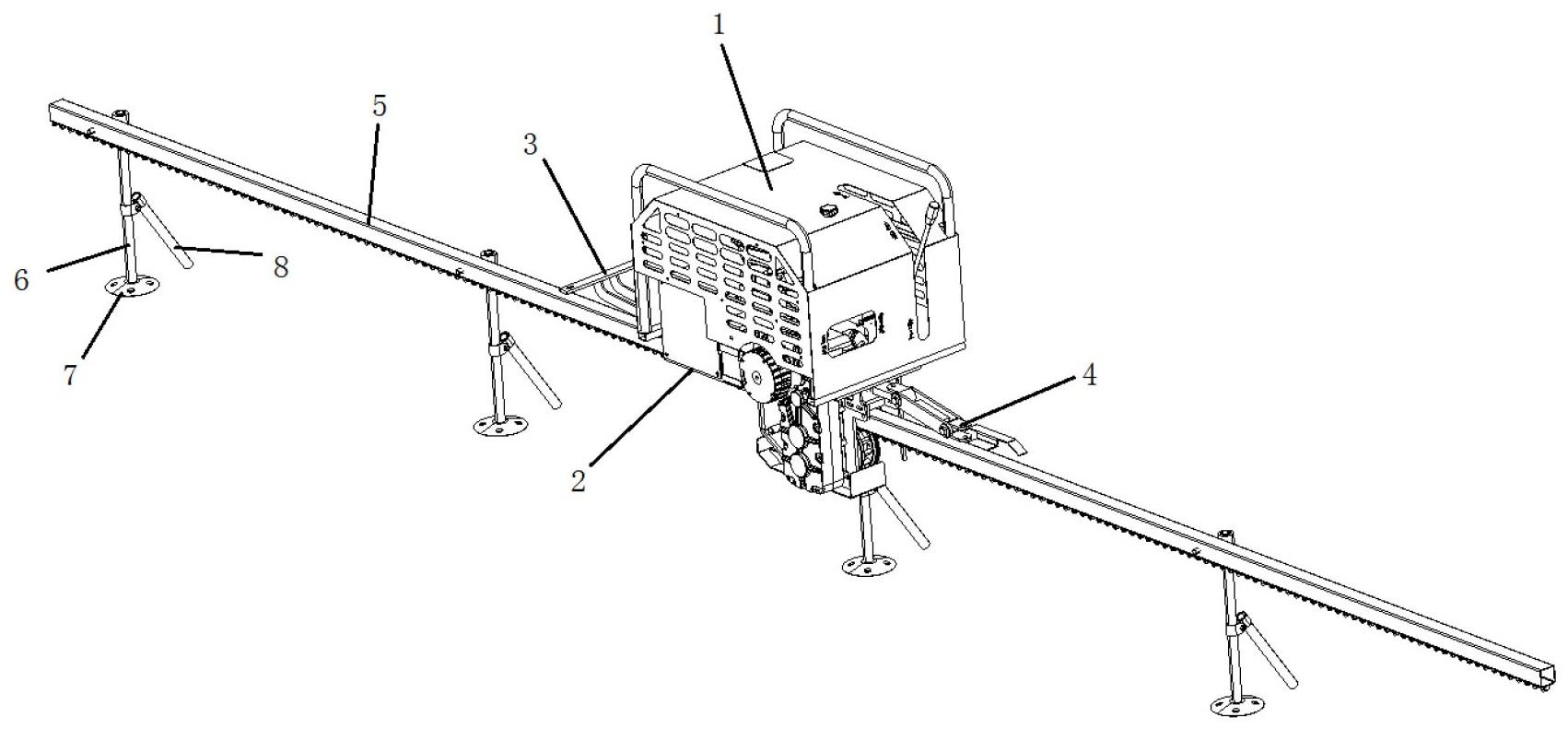
2、本申请实施例还提供了一种智能遥控单轨运输机,包括:轨道以及配合连接在轨道顶部的运输机本体;
3、所述轨道底部设置有若干个齿片;
4、所述运输机本体包括变速箱以及设置在变速了顶部的动力源,所述动力源用于对变速箱输出动力,并控制变速箱沿轨道滑动;
5、所述变速箱的输出端连接有驱动轮,所述驱动轮与齿片啮合;
6、所述变速箱一侧且位于所述轨道的顶部设置有导向轮,所述导向轮所述驱动轮同步滑动。
7、可选地,在本申请实施例所述的智能遥控单轨运输机中,所述运输机本体一端设置有第一牵引铰链,所述运输机本体的另一端设置有第二牵引铰链,所述第一牵引铰链与所述第二牵引铰链端部均设置有至少一个固定孔。
8、可选地,在本申请实施例所述的智能遥控单轨运输机中,所述运输机本体还包括第一控制电机与第二控制电机,所述第一控制电机设置在所述变速箱的上方,所述变速箱顶部设置有皮带轮,所述第一控制电机与所述皮带轮通过传动皮带连接,所述第一控制电机用于控制变速箱档位拨动至前进档或后退档;所述第二控制电机与驱动轮配合连接,所述第二控制电机用于控制变速箱的启停,从而带动所述驱动轮沿轨道滑动。
9、可选地,在本申请实施例所述的智能遥控单轨运输机中,所述变速箱一侧设置有蓄电池,所述蓄电池一侧设置有控制单元,所述蓄电池蓄电池用于对控制单元、第一控制电机与第二控制电机提供电源,所述控制单元以无线连接的方式配合连接有遥控器。
10、可选地,在本申请实施例所述的智能遥控单轨运输机中,所述运输机本体外侧设置有防护框,所述动力源为汽油发动机,所述动力源一侧设置有油箱。
11、可选地,在本申请实施例所述的智能遥控单轨运输机中,所述轨道一侧沿所述轨道的长度方向均布有多个固定环,所述固定环内侧插入支架,所述支架与所述轨道垂直设置。
12、可选地,在本申请实施例所述的智能遥控单轨运输机中,所述支架底部设置有固定座,所述支架中间位置铰接有加强杆,所述加强杆与所述支架之间的角度为30-60度。
13、第二方面,本申请实施例提供了一种智能遥控单轨运输机控制方法,应用于上述任一权利要求所述的智能遥控单轨运输机,包括如下步骤:
14、获取轨道参数信息,根据轨道参数信息建立移动位置坐标,并获取运输机本体实时位置信息;
15、将运输机本体实时位置信息与预设的位置信息进行比较,得到位置偏差率;
16、判断所述位置偏差率是否大于或等于预设的偏差率阈值;
17、若大于或等于,则生成补偿信息,根据补偿信息对运输机本体移动参数进行反馈修正;
18、若小于,则实时获取运输机本体移动状态信息。
19、可选地,在本申请实施例所述的智能遥控单轨运输机控制方法中,所述获取轨道参数信息,根据轨道参数信息建立移动位置坐标,并获取运输机本体实时位置信息之后,还包括:
20、根据轨道参数信息建立标志点,并获取标志点位置坐标;
21、获取运输机本体实时位置信息,并生成运输机本体中心点位置坐标;
22、将标志点位置坐标与运输机本体中心点位置坐标进行比较,计算运输机本体与标志点之间的距离;
23、设定时间节点,生成不同时间节点的运输机本体与标志点之间的距离;
24、将相邻时间节点的运输机本体与标志点之间的距离进行做差计算,得到距离差;
25、判断所述距离差是否为正,若为正,则判定运输机本体沿第一方向移动;
26、若为负,则判定运输机本体沿第二方向移动;
27、所述第一方向与所述第二方向相反。
28、第三方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括智能遥控单轨运输机控制方法程序,所述智能遥控单轨运输机控制方法程序被处理器执行时,实现如上述任一项所述的智能遥控单轨运输机控制方法的步骤。
29、由上可知,本申请实施例提供的一种智能遥控单轨运输机、控制方法及介质,通过设置轨道以及配合连接在轨道顶部的运输机本体;轨道底部设置有若干个齿片;运输机本体包括变速箱以及设置在变速了顶部的动力源,动力源用于对变速箱输出动力,并控制变速箱沿轨道滑动;变速箱的输出端连接有驱动轮,驱动轮与齿片啮合;变速箱一侧且位于轨道的顶部设置有导向轮,导向轮驱动轮同步滑动,本发明具备布局紧凑、体积小,使其具备了在对空间条件紧张的设备上的应用基础,使运输能够不再依靠人力,大大解放了人工提升了运输的效率,通过智能远程控制,从而实现运输机在任意位置启停的技术。
30、本申请的其他特征和优点将在随后的说明书阐述,本申请的目的和优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种智能遥控单轨运输机,包括:轨道以及配合连接在轨道顶部的运输机本体;其特征在于,
2.根据权利要求1所述的智能遥控单轨运输机,其特征在于,所述运输机本体一端设置有第一牵引铰链,所述运输机本体的另一端设置有第二牵引铰链,所述第一牵引铰链与所述第二牵引铰链端部均设置有至少一个固定孔。
3.根据权利要求2所述的智能遥控单轨运输机,其特征在于,所述运输机本体还包括第一控制电机与第二控制电机,所述第一控制电机设置在所述变速箱的上方,所述变速箱顶部设置有皮带轮,所述第一控制电机与所述皮带轮通过传动皮带连接,所述第一控制电机用于控制变速箱档位拨动至前进档或后退档;所述第二控制电机与驱动轮配合连接,所述第二控制电机用于控制变速箱的启停,从而带动所述驱动轮沿轨道滑动。
4.根据权利要求3所述的智能遥控单轨运输机,其特征在于,所述变速箱一侧设置有蓄电池,所述蓄电池一侧设置有控制单元,所述蓄电池蓄电池用于对控制单元、第一控制电机与第二控制电机提供电源,所述控制单元以无线连接的方式配合连接有遥控器。
5.根据权利要求4所述的智能遥控单轨运输机,其特征在于,所述运输机本体外侧设置有防护框,所述动力源为汽油发动机,所述动力源一侧设置有油箱。
6.根据权利要求5所述的智能遥控单轨运输机,其特征在于,所述轨道一侧沿所述轨道的长度方向均布有多个固定环,所述固定环内侧插入支架,所述支架与所述轨道垂直设置。
7.根据权利要求6所述的智能遥控单轨运输机,其特征在于,所述支架底部设置有固定座,所述支架中间位置铰接有加强杆,所述加强杆与所述支架之间的角度为30-60度。
8.一种智能遥控单轨运输机控制方法,应用于权利要求1-7中任一权利要求所述的智能遥控单轨运输机,其特征在于,包括如下步骤:
9.根据权利要求8所述的智能遥控单轨运输机控制方法,其特征在于,所述获取轨道参数信息,根据轨道参数信息建立移动位置坐标,并获取运输机本体实时位置信息之后,还包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括智能遥控单轨运输机控制方法程序,所述智能遥控单轨运输机控制方法程序被处理器执行时,实现如权利要求8至9中任一项所述的智能遥控单轨运输机控制方法的步骤。
技术总结
本申请实施例提供了一种智能遥控单轨运输机、控制方法及介质,该单轨运输机包括:轨道以及配合连接在轨道顶部的运输机本体;轨道底部设置有若干个齿片;运输机本体包括变速箱以及设置在变速了顶部的动力源,动力源用于对变速箱输出动力,并控制变速箱沿轨道滑动;变速箱的输出端连接有驱动轮,驱动轮与齿片啮合;变速箱一侧且位于轨道的顶部设置有导向轮,导向轮驱动轮同步滑动,本发明具备布局紧凑、体积小,使其具备了在对空间条件紧张的设备上的应用基础,使运输能够不再依靠人力,大大解放了人工,提升了运输的效率,通过智能远程控制,从而实现运输机在任意位置启停。
技术研发人员:杨洪龙,单仁永,陈性利,郑仁英,卢平波
受保护的技术使用者:杭州集英智慧农业装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!