一种小拐臂绝缘斗臂车斗及其防碰控制方法与流程
本发明属于高空作业车,具体涉及一种小拐臂绝缘斗臂车斗及其防碰控制方法。
背景技术:
1、随着国家基建、城市电网建设的快速发展,绝缘斗臂车越来越多的应用在电力抢修、市政维护等场合,绝缘斗臂车的安全运动控制就凸显重要,小拐臂的绝缘斗臂车,因作业斗回转灵活,角度回转大,可以更灵活的适用各种场合,但也因其灵活的回转作业,作业斗更容易因误操作与伸缩臂体干涉碰撞,导致车辆危险事故的发生。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种小拐臂绝缘斗臂车斗及其防碰控制方法,通过伸缩臂变幅角度,判断作业斗是否存在碰撞风险,若存在回转碰撞风险,通过回转编码器检测斗回转和拐臂回转的实时角度,通过角度信息和结构件尺寸信息,实时计算出作业斗碰撞点的相对位置坐标,根据坐标值反馈出与伸缩臂臂体的距离,进而进行作业斗的回转控制,若距离值进入设定的危险区域范围,则停止相应的回转动作;若存在变幅下降碰撞风险,则通过计算回转坐标值,若已在危险区域范围内,则禁止伸缩臂下降至危险角度内。
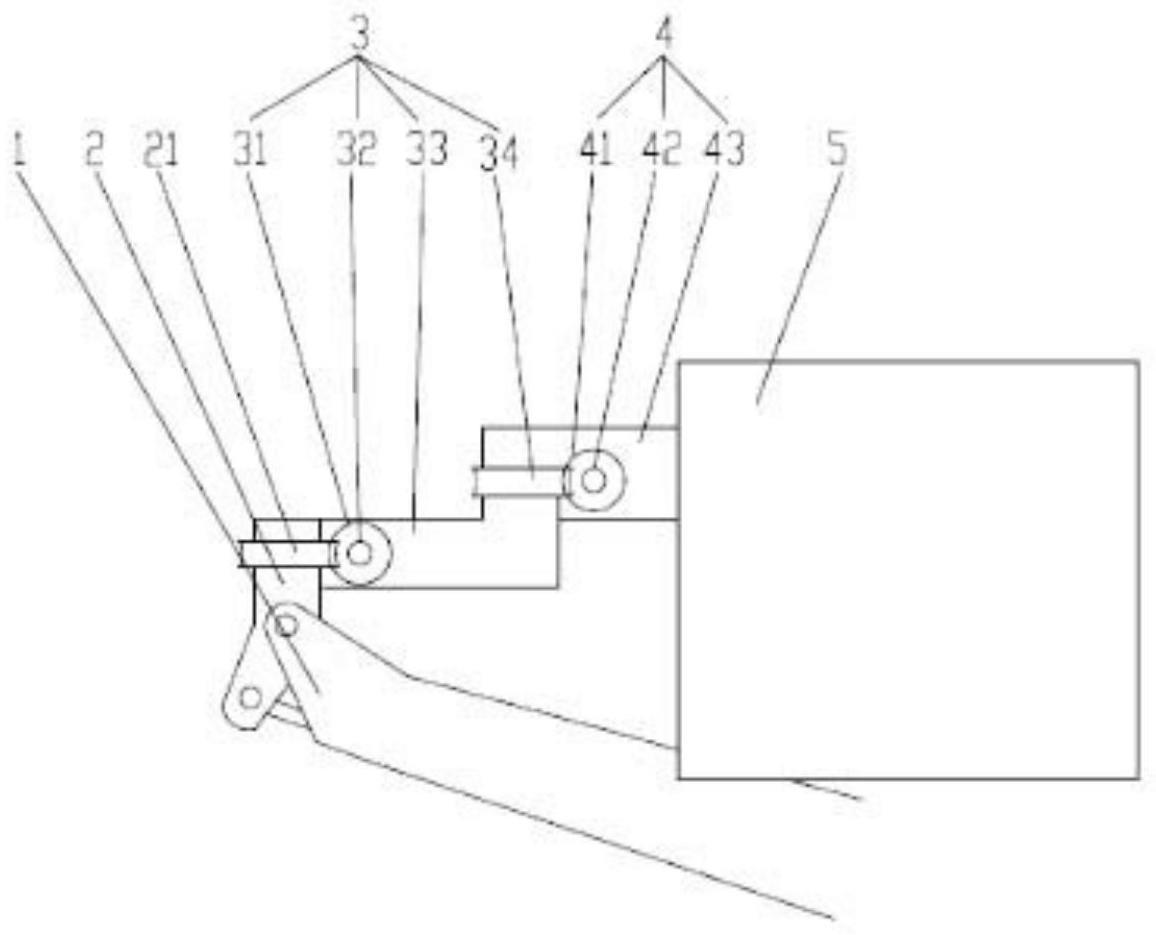
2、为了实现上述目的,本发明采用的技术方案是:一种小拐臂绝缘斗臂车斗,安装在带有伸缩臂的工程车上,所述伸缩臂端部为主绝缘段,小拐臂绝缘斗臂车斗铰接在主绝缘段上,并通过设置在伸缩臂中的伸缩机构控制小拐臂绝缘斗臂车斗上下摆动,小拐臂绝缘斗臂车斗包括:调平基座、拐臂结构、斗回转托架、绝缘工作斗,调平基座与主绝缘段和伸缩机构连接,所述拐臂结构两端分别与调平基座和斗回转托架铰接,使拐臂结构、斗回转托架能在围绕铰接位置左右转动,斗回转托架与绝缘工作斗刚性连接。
3、进一步的,所述调平基座上安装有拐臂回转传动用蜗轮。
4、进一步的,所述拐臂结构包括:拐臂回转传动用蜗杆、拐臂回转角度检测编码器、拐臂、斗回转传动用蜗轮,所述拐臂两端分别铰接在调平基座、斗回转托架上,拐臂回转传动用蜗杆通过轴承座安装拐臂上,使拐臂回转传动用蜗杆与拐臂回转传动用蜗轮啮合,拐臂回转角度检测编码器与拐臂回转传动用蜗杆连接,通过拐臂回转传动用蜗杆和拐臂回转传动用蜗轮的减速比计算出拐臂结构的回转角度,所述斗回转传动用蜗轮安装在拐臂远离调平基座的一端。
5、进一步的,所述斗回转托架包括:斗回转传动用蜗杆、斗回转角度检测编码器、回转连接托架;回转连接托架一端与绝缘工作斗刚性连接,另一端铰接在拐臂结构上,斗回转传动用蜗杆通过轴承座安装回转连接托架,使斗回转传动用蜗杆与斗回转传动用蜗轮啮合,斗回转角度检测编码器与斗回转传动用蜗杆,通过斗回转传动用蜗杆和斗回转传动用蜗轮的减速比计算出斗回转托架的回转角度。
6、进一步的,所述斗回转传动用蜗杆、拐臂回转传动用蜗杆通过外置马达进行控制,马达和编码器和车载控制系统连接。
7、进一步的,所述蜗杆和蜗轮还可以采用摆动油缸替换。
8、一种小拐臂绝缘斗臂车斗的防碰控制方法,绝缘臂工作斗与伸缩臂的主绝缘段可能存在以下两种碰撞情况,情况1:伸缩臂的主绝缘段变幅角度过低,拐臂结构和斗回转托架在向主绝缘段方向回转的过程中,会引起作业斗与主绝缘段碰撞的风险;情况2:伸缩臂的主绝缘段变幅升起到一定角度,绝缘工作斗底部已在主绝缘段上方,拐臂结构和斗回转拖架可以任意回转,当绝缘工作斗回转至主绝缘段上方,此时若伸缩臂的主绝缘段进行变幅降操作,在变幅降的过程中,会引起作业斗与主绝缘段碰撞的风险。
9、通过计算绝缘工作斗的角点坐标,判断工作斗与绝缘段的相对位置情况,进而进行风险预判控制动作,具体实现如下:
10、拐臂结构回转至与主绝缘段延长方向,此位置设定为拐臂结构与主绝缘段的相对回转角度θ13由的零度位置,θ13由拐臂回转编码器的读数值通过拐臂回转传动用蜗杆和拐臂回转传动用蜗轮的减速比计算而得出来;斗回转拖架回转至与拐臂结构的延长方向,此位置设定为斗回转拖架与拐臂结构的相对回转角度θ34的零度位置,θ34由斗回转角度检测编码器的读数值通过斗回转传动用蜗杆和斗回转传动用涡轮的减速比计算而得出来。
11、以拐臂结构和斗回转拖架向右回转为例,以主绝缘段的臂方向为y轴方向,以主绝缘段和拐臂结构的连接点为坐标原点o建立坐标系,求出工作斗中a点和d点x方向坐标;
12、拐臂结构和斗回转托架的连接点为点b,点o与点b之间为固定距离lob,因斗回转托架和绝缘工作斗之间是刚性连接,工作斗的a点与连接点b点之间为固定距离laba,ab与eb之间的夹角为固定值θabe,eb与cb之间的夹角,即是斗回转角度θ34,由斗回转角度检测编码器读取并转换求得,ab与ob之间的夹角θabo=180°-θabe-θ34;
13、根据三角形余弦定理,
14、根据三角形余弦定理,
15、角度θyoa=180°-θaob-θ13;
16、绝缘工作斗中a点x方向坐标,xa=lao×sinθyoa;
17、同理,可求出绝缘工作斗中b点的x方向坐标xb;
18、可设定绝缘工作斗与主绝缘段之间的危险靠近值xmin,当xa<xmin或xb<xmin时,即可判定工作斗与主绝缘段之间存在碰撞风险。
19、一种小拐臂绝缘斗臂车斗的防碰控制方法,具体控制方法如下:根据上述提到的两种碰撞情况,伸缩臂的主绝缘段的变幅角度小于设定角度α时,车载控制系统中的控制程序进入情况的判定子程序中,通过采集拐臂回转角度检测编码器和斗回转角度检测编码器的读数值,根据上述计算公式,求出当前绝缘工作斗中a点和b点x方向坐标,若xa<xmin或xb<xmin,立即停止当前方向回转动作,即可避免情况1的碰撞风险;伸缩臂的主绝缘段的变幅升高大于设定角度α时,车载控制系统中的控制程序进入情况2的判定子程序中,拐臂结构和斗回转拖架可以任意回转,通过采集拐臂回转角度检测编码器和斗回转角度检测编码器的读数值,根据上述计算公式,求出当前绝缘工作斗中a点和b点x方向坐标,若xa<xmin或xb<xmin,认为绝缘工作斗已回转至主绝缘段的上方,当主绝缘段执行变幅降操作时,若降至设定角度α,即停止主绝缘段变幅降动作,防止情况2的碰撞风险。
20、本发明的有益效果是:通过伸缩臂变幅角度,判断作业斗是否存在碰撞风险。若存在回转碰撞风险,通过回转编码器检测斗回转和拐臂回转的实时角度,通过角度信息和结构件尺寸信息,实时计算出作业斗碰撞点的相对位置坐标,根据坐标值反馈出与伸缩臂臂体的距离,进而进行作业斗的回转控制。若距离值进入设定的危险区域范围,则停止相应的回转动作;若存在变幅下降碰撞风险,则通过计算回转坐标值,若已在危险区域范围内,则禁止伸缩臂下降至危险角度内,以保证作业斗不会与伸缩臂体发生碰撞,提高安全。
技术特征:
1.一种小拐臂绝缘斗臂车斗,安装在带有伸缩臂的工程车上,其特征在于:所述伸缩臂端部为主绝缘段,小拐臂绝缘斗臂车斗铰接在主绝缘段上,并通过设置在伸缩臂中的伸缩机构控制小拐臂绝缘斗臂车斗上下摆动,小拐臂绝缘斗臂车斗包括:调平基座、拐臂结构、斗回转托架、绝缘工作斗,调平基座与主绝缘段和伸缩机构连接,所述拐臂结构两端分别与调平基座和斗回转托架铰接,使拐臂结构、斗回转托架能在围绕铰接位置左右转动,斗回转托架与绝缘工作斗刚性连接。
2.根据权利要求1所述的一种小拐臂绝缘斗臂车斗,其特征在于:所述调平基座上安装有拐臂回转传动用蜗轮。
3.根据权利要求2所述的一种小拐臂绝缘斗臂车斗,其特征在于:所述拐臂结构包括:拐臂回转传动用蜗杆、拐臂回转角度检测编码器、拐臂、斗回转传动用蜗轮,所述拐臂两端分别铰接在调平基座、斗回转托架上,拐臂回转传动用蜗杆通过轴承座安装拐臂上,使拐臂回转传动用蜗杆与拐臂回转传动用蜗轮啮合,拐臂回转角度检测编码器与拐臂回转传动用蜗杆连接,通过拐臂回转传动用蜗杆和拐臂回转传动用蜗轮的减速比计算出拐臂结构的回转角度,所述斗回转传动用蜗轮安装在拐臂远离调平基座的一端。
4.根据权利要求3所述的一种小拐臂绝缘斗臂车斗,其特征在于:所述斗回转托架包括:斗回转传动用蜗杆、斗回转角度检测编码器、回转连接托架;回转连接托架一端与绝缘工作斗刚性连接,另一端铰接在拐臂结构上,斗回转传动用蜗杆通过轴承座安装回转连接托架,使斗回转传动用蜗杆与斗回转传动用蜗轮啮合,斗回转角度检测编码器与斗回转传动用蜗杆,通过斗回转传动用蜗杆和斗回转传动用蜗轮的减速比计算出斗回转托架的回转角度。
5.根据权利要求4所述的一种小拐臂绝缘斗臂车斗,其特征在于:所述斗回转传动用蜗杆、拐臂回转传动用蜗杆通过外置马达进行控制,马达和编码器和车载控制系统连接。
6.根据权利要求4所述的一种小拐臂绝缘斗臂车斗,其特征在于:所述蜗杆和蜗轮还可以采用摆动油缸替换。
7.根据权利要求5所述的一种小拐臂绝缘斗臂车斗的防碰控制方法,其特征在于:绝缘臂工作斗与伸缩臂的主绝缘段可能存在以下两种碰撞情况,情况1:伸缩臂的主绝缘段变幅角度过低,拐臂结构和斗回转托架在向主绝缘段方向回转的过程中,会引起作业斗与主绝缘段碰撞的风险;情况2:伸缩臂的主绝缘段变幅升起到一定角度,绝缘工作斗底部已在主绝缘段上方,拐臂结构和斗回转拖架可以任意回转,当绝缘工作斗回转至主绝缘段上方,此时若伸缩臂的主绝缘段进行变幅降操作,在变幅降的过程中,会引起作业斗与主绝缘段碰撞的风险。
8.根据权利要求7所述的一种小拐臂绝缘斗臂车斗的防碰控制方法,其特征在于:通过计算绝缘工作斗的角点坐标,判断工作斗与绝缘段的相对位置情况,进而进行风险预判控制动作,具体实现如下:
9.根据权利要求8所述的一种小拐臂绝缘斗臂车斗的防碰控制方法,其特征在于:以拐臂结构和斗回转拖架向右回转为例,以主绝缘段的臂方向为y轴方向,以主绝缘段和拐臂结构的连接点为坐标原点o建立坐标系,求出工作斗中a点和d点x方向坐标;
10.根据权利要求9所述的一种小拐臂绝缘斗臂车斗的防碰控制方法,其特征在于:具体控制方法如下:根据上述提到的两种碰撞情况,伸缩臂的主绝缘段的变幅角度小于设定角度α时,车载控制系统中的控制程序进入情况的判定子程序中,通过采集拐臂回转角度检测编码器和斗回转角度检测编码器的读数值,根据上述计算公式,求出当前绝缘工作斗中a点和b点x方向坐标,若xa<xmin或xb<xmin,立即停止当前方向回转动作,即可避免情况1的碰撞风险;伸缩臂的主绝缘段的变幅升高大于设定角度α时,车载控制系统中的控制程序进入情况2的判定子程序中,拐臂结构和斗回转拖架可以任意回转,通过采集拐臂回转角度检测编码器和斗回转角度检测编码器的读数值,根据上述计算公式,求出当前绝缘工作斗中a点和b点x方向坐标,若xa<xmin或xb<xmin,认为绝缘工作斗已回转至主绝缘段的上方,当主绝缘段执行变幅降操作时,若降至设定角度α,即停止主绝缘段变幅降动作,防止情况2的碰撞风险。
技术总结
本发明揭示了一种小拐臂绝缘斗臂车斗,小拐臂绝缘斗臂车斗铰接在伸缩臂端部的主绝缘段上,并通过设置在伸缩臂中的伸缩机构控制小拐臂绝缘斗臂车斗上下摆动,通过伸缩臂变幅角度,判断作业斗是否存在碰撞风险,若存在回转碰撞风险,通过回转编码器检测斗回转和拐臂回转的实时角度,通过角度信息和结构件尺寸信息,实时计算出作业斗碰撞点的相对位置坐标,根据坐标值反馈出与伸缩臂臂体的距离,进而进行作业斗的回转控制,若距离值进入设定的危险区域范围,则停止相应的回转动作;若存在变幅下降碰撞风险,则通过计算回转坐标值,若已在危险区域范围内,则禁止伸缩臂下降至危险角度内,以保证作业斗不会与伸缩臂体发生碰撞,提高安全。
技术研发人员:商晓恒,苗长青,任路遥,陈磊,丁雷雷
受保护的技术使用者:徐州徐工随车起重机有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!