电子玻璃机械手自适应堆垛方法与流程
本发明涉及电子玻璃制造,特别是一种电子玻璃机械手自适应堆垛方法。
背景技术:
1、在现有技术中,随着显示技术的发展,电子玻璃在各种智能终端及消费电子产品中的应用越来越广泛。电子玻璃作为一种新型显示载体,具有轻薄、高强度等特点。但其厚度极薄,坚韧性较差,在制造、输送和加工过程中易碎、易损。如何提高电子玻璃的机械化自动化处理水平,保证其在制造和加工中的质量,是电子玻璃产业发展过程中亟待解决的难题。
2、在电子玻璃的制造工艺中,冷端玻璃堆垛是重要的环节之一,该环节多采用机械手自动堆垛方案,常规的玻璃机械手堆垛通常采用预编程方式,按照固定姿态进行堆垛,即机械手将玻璃放到玻璃架的时候,机械手都是一个固定的姿态,但实际情况客户端现场的玻璃架尺寸都是不一致的,所以就会出现某些玻璃架堆垛的效果不理想,难以适应具有各种尺寸和形状的堆垛架,其堆垛效果和效率仍有很大改进空间。
技术实现思路
1、为了解决上述问题,本发明提供了一种针对玻璃架的姿态,自动调整机械手堆垛姿态,从而提升堆垛的效果的电子玻璃机械手自适应堆垛方法。
2、为了达到上述目的,本发明设计的电子玻璃机械手自适应堆垛方法,使用堆垛架、机械手和吸盘架,所述吸盘架固定安装于机械手的输出端,且所述吸盘架包括由多个吸盘组成的吸附平面和多个用于检测吸盘压深距离值的位移传感器,多个位移传感器位于同一平面但不位于同一条直线上,堆垛时按以下步骤进行:
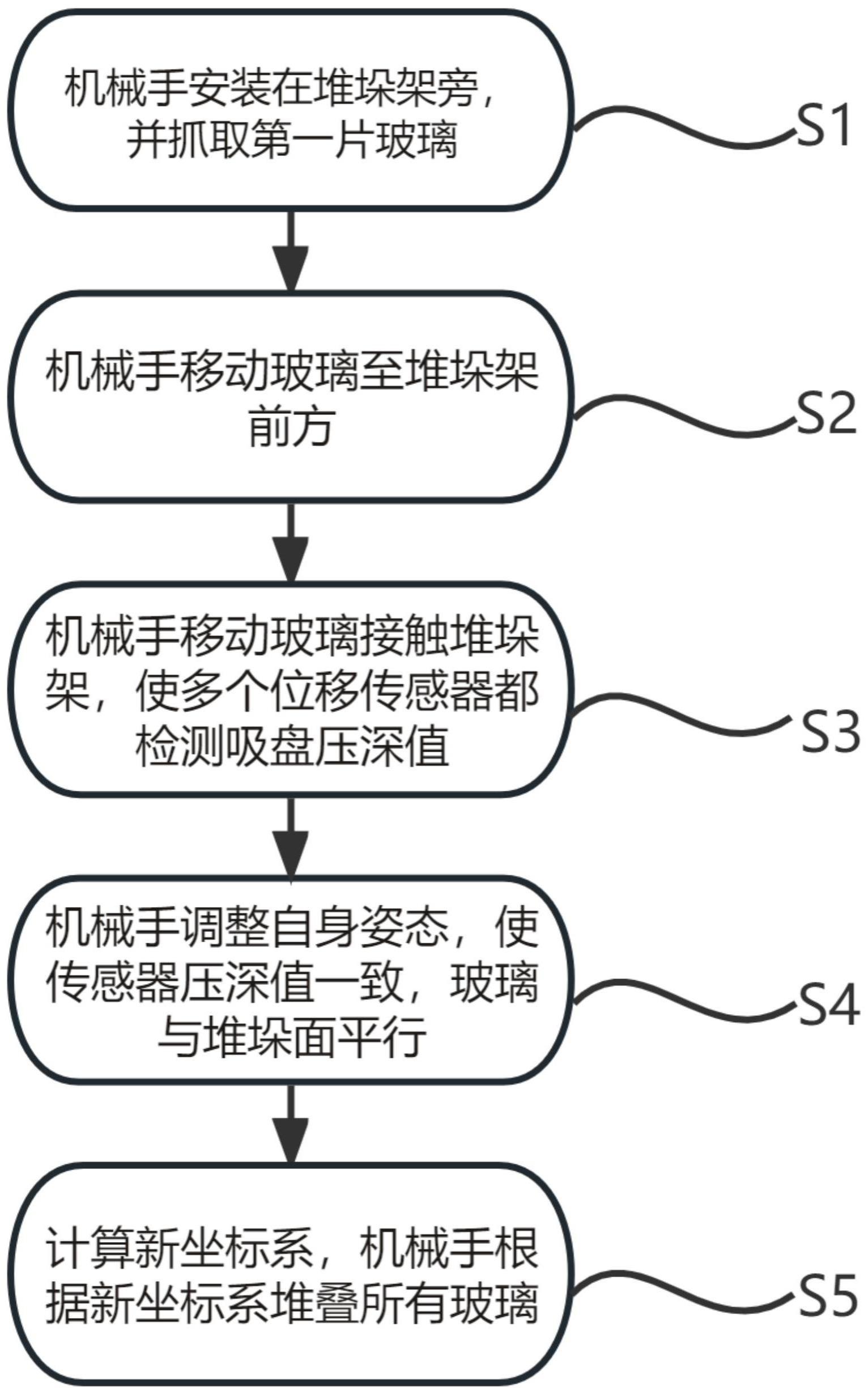
3、s1.机械手安装于堆垛架旁侧,机械手通过多个吸盘组成的吸附平面从输送线堆垛工位上真空吸附需要堆垛的电子玻璃;
4、s2.针对堆垛架上第一片电子玻璃,机械手根据预定路径带动电子玻璃移动至堆垛架前方;
5、s3.机械手缓慢移动使第一片电子玻璃接触堆垛架,直至多个位移传感器都检测到吸盘架的压深距离值;
6、s4.机械手调整自身姿态,直至吸盘架上多个位移传感器检测的压深距离值达到一致,以使电子玻璃与堆垛架的堆垛平面之间达到平行;
7、s5.在电子玻璃与堆垛架的堆垛平面保持平行状态下,重新计算新堆垛平面参考坐标系,机械手根据新堆垛平面参考坐标系堆叠第一片电子玻璃及后续电子玻璃直至完成同一堆垛架的堆垛操作。
8、进一步的方案是,步骤s5中,根据以下步骤计算新堆垛平面参考坐标系:
9、a.在电子玻璃与堆垛架的堆垛平面保持平行状态时,读取多个位移传感器在机械手坐标系下的三维坐标值;
10、b.计算位移传感器空间坐标值的差向量,求取表示平面方向的平面向量;
11、c.对平面向量进行单位化处理,得到法向量;
12、d.根据法向量计算旋转矩阵,确定表示堆垛架新堆垛平面姿态的参考坐标系;
13、e.根据计算所得参考坐标系,调整机械手姿态;
14、f.机械手按调整后的姿态堆垛电子玻璃。
15、进一步的方案是,所述位移传感器至少设有三个。
16、进一步的方案是,所述的机械手的姿态调整包括平移和旋转。
17、进一步的方案是,步骤s1中,机械手通过吸附平面从电子玻璃下方或从电子玻璃上方真空吸附输送线上的电子玻璃。
18、进一步的方案是,还包括举升设备,输送线将电子玻璃输送到堆垛工位时,举升设备将电子玻璃举升使电子玻璃与输送线的输送辊道分离。
19、进一步的方案是,所述机械手为多关节机器人。
20、本发明所设计的电子玻璃机械手自适应堆垛方法,通过设置多组位移传感器对吸盘与堆垛架之间的距离进行检测,并根据位移传感器采集的数据,运用几何关系计算确定堆垛架的具体平面姿态;然后根据计算所得的堆垛架平面姿态参数,由机械手控制系统自动规划并控制机械手的运动轨迹和堆垛动作,实现机械手姿态的实时自主调整,使电子玻璃保持与堆垛架平行的正确姿态,完成精确堆垛。
技术特征:
1.一种电子玻璃机械手自适应堆垛方法,使用堆垛架、机械手和吸盘架,其特征是,所述吸盘架固定安装于机械手的输出端,且所述吸盘架包括由多个吸盘组成的吸附平面和多个用于检测吸盘压深距离值的位移传感器,多个位移传感器位于同一平面但不位于同一条直线上,堆垛时按以下步骤进行:
2.根据权利要求1所述的电子玻璃机械手自适应堆垛方法,其特征是,步骤s5中,根据以下步骤计算新堆垛平面参考坐标系:
3.根据权利要求1或2所述的电子玻璃机械手自适应堆垛方法,其特征是,所述位移传感器至少设有三个。
4.根据权利要求1或2所述的电子玻璃机械手自适应堆垛方法,其特征是,所述的机械手的姿态调整包括平移和旋转。
5.根据权利要求1所述的电子玻璃机械手自适应堆垛方法,其特征是,步骤s1中,机械手通过吸附平面从电子玻璃下方或从电子玻璃上方真空吸附输送线上的电子玻璃。
6.根据权利要求5所述的电子玻璃机械手自适应堆垛方法,其特征是,还包括举升设备,输送线将电子玻璃输送到堆垛工位时,举升设备将电子玻璃举升使电子玻璃与输送线的输送辊道分离。
7.根据权利要求1所述的电子玻璃机械手自适应堆垛方法,其特征是,所述机械手为多关节机器人。
技术总结
本发明涉及一种电子玻璃机械手自适应堆垛方法,通过设置多组位移传感器对吸盘与堆垛架之间的距离进行检测,并根据位移传感器采集的数据,运用几何关系计算确定堆垛架的具体平面姿态;然后根据计算所得的堆垛架平面姿态参数,由机械手控制系统自动规划并控制机械手的运动轨迹和堆垛动作,实现机械手姿态的实时自主调整,使电子玻璃保持与堆垛架平行的正确姿态,完成精确堆垛。
技术研发人员:杨建敏,邓晓强,李秋涛
受保护的技术使用者:格林策巴赫机械(嘉善)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!